.jpg)
用于水产养殖的机器人设计

孙炜喆 陈洁 李承峰 王 乾 王和瑞
南通理工学院 江苏南通 226002
1 背景
在人口增长和科技水平不断提升的现代,水下机器人[1] 逐渐在水产养殖、海洋资源开发等领域崭露头角 。中国积极推进海洋经济战略布局,把水下智能装备技术列为重点发展领域。从技术演进趋势看,当前水下机器人研发[2] 重点集中在智能控制系统开发、设备微型化改进以及结构材料轻量化设计三个维度,这些技术的突破将会大幅降低设备运行能耗与制造成本 [3],且显著提升其在深海探测、管道检修等复杂工况下的作业性能与机动灵活性 [4-5]。
2 水下机器人机械结构设计
机械结构是水下机器人性能的基础,直接影响流体动力特性、运动灵活性与环境适应性。本设计基于水产养殖场景需求,采用紧凑型模块化设计理念,优化设备舱、电池舱与推进系统布局,解决传统框架型机器人水阻大、空间利用率低等问题。通过铝合金与工程塑料复合结构实现轻量化,结合导流罩优化与三叶螺旋桨设计,提升推力密度与能效比,设计一款具备可行性的水下机器人。机器人采用模块化设计,由控制单元、浮力调节模块、多组推进装置和能源储存系统组成,选用铝合金框架搭配工程塑料外壳,复合结构保证强度的同时实现轻量化,独特混合浮力调节技术提升水中平衡性能,智能多向推进系统赋予装置全方位运动能力适应复杂水下环境。
机器人通过精密设计的动力分配算法协同控制八个推进器,既保证运动稳定性又降低能耗,为长时间水下监测提供可靠技术支持。
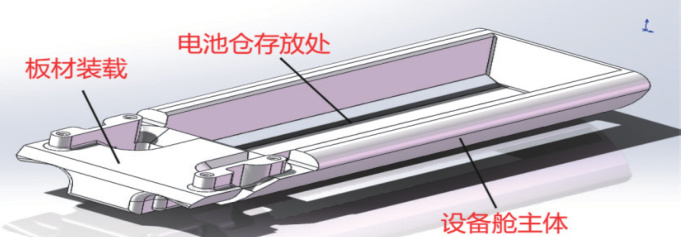
如图 1-1 中,在设备舱与电池舱设计中,着重设计了设备舱的密封防水功能,其内部安装所有电子设备,包括机器人主控板和电池等。电池舱采用抽屉式拔插设计,方便更换和维护。使用高能量密度、高转换效率的锂电池,确保机器人具备持久的续航能力,同时更加清洁高效。
图1-1 设备舱建模
在推进器设计上,机器人的运动机构由八个推进器组成,包每个推进器由电机、导流罩和螺旋桨三部分组成,能够实现多维度的全姿态运行。这种设计确保机器人在水下能够灵活移动,适应各种复杂的水下作业需求。
在浮力块设计上,机器人整体上方四边角的浮力单元称为浮力块,它们为机器人提供了一定的浮力,提高了机器人在水中工作时的行驶稳定性。这种设计有助于机器人在水下保持平衡,减少因水流变化带来的影响。
3 水下机器人硬件系统设计
本设计选择了 STM32F103C8T6 作为控制芯片,水质监测仪器外接设计采用 STM32 板材,根据开源程序自研程序作为水质监测传感 器,此仪器采用模块化设计,可同步测量电导率( 1-20000μS/cm )、温度(-20 C ~60 °C )、盐度( 0-100PSU )及 TDS( 0-10,000ppm ),覆盖从纯净水到高盐度水体的全场景需求。其内置温度补偿算法可消除环境温度对电导率测量的干扰,确保数据准确性。传感器基于四电极电导率测量技术,通过双频激励信号减少极化效应,精度达 ±1% FS。同时,接触笔采用 316L 不锈钢电极设计,耐腐蚀性强。集成边缘计算模块,支持实时数据滤波、异常值剔除及动态校准。数据可通过 4G/GPRS 传输至云平台,并生成可视化报告(如浓度趋势图、超标预警),满足智慧水务管理需求。水深水压传感器选用了 MS5837,水深分辨率高达 2mm 的它具有 I2C 接口支持与 AI 水质分析平台对接,通过历史数据训练预测模型。实验表明,系统响应时间 <3 秒,能耗较传统设计降低 20% 。为后续架构整体设计提供了良好的基础。
4 水下机器人的功能特点
本设计监测系统集成了湿度温度传感器、氨氮监测仪、TDS 检测装置、含氧量检测仪器等先进设备,实现环境参数实时精准测量。湿度温度传感器监测环境温湿度变化,提供基础气候数据,氨氮监测仪实时检测氨氮含量评估水质污染,TDS 检测装置测量水中溶解性固体总量分析矿物质含量,含氧量检测仪器监测氧气浓度,为生态研究提供参数。系统智能化数据汇报功能,按预设时间间隔自动传输监测数据,提升数据采集效率保障数据连续完整,为数据分析研究提供可靠支持。
为契合水产养殖中对水下环境精准监测与作业的需求,本设计的水产养殖机器人配备先进实时传输摄影系统,能在水下检测时将养殖环境实时画面清晰传输至地面控制台或其他监控设备,助力养殖人员实时观察水下生物生长、水质变化及养殖设备运行状况,极大提升养殖管理效率与精准度。
在技术实现上,设计运用最新无线通信技术,使水产养殖机器人能将拍摄的高清影像实时稳定传输至地面或指定设备,既确保信息即时性,又减少人工下水检查频率,降低劳动强度与潜在风险。
该设计应用前景广阔。在水产养殖领域,能帮助养殖人员及时察觉疾病、水质问题或设备故障,进而采取有效干预措施,保障养殖生物健康生长。同时,随着技术的不断发展和成本的降低,这种实时传输摄影系统[6] 有望在更多小型养殖场得到广泛应用,推动整个水产养殖行业的智能化和现代化进程。
5 结论
本设计聚焦于水产养殖行业现存痛点,成功开发出一款适用于水产养殖场景的水下机器人,着力解决传统养殖模式中效率低下、运营成本高昂以及环境监测实时性不足等关键问题,为水产养殖行业智能化、自动化转型升级注入新动能。该水下机器人在机械结构设计上独具匠心,通过精巧布局实现紧凑外形与多元功能的有机统一,不仅能在复杂水下环境中保持出色的稳定性,还具备灵活的运动性能,配合高效的能源管理系统,可满足长时间水下作业需求。硬件系统精心筛选并集成多种高性能传感器与执行器,确保机器人能够精准采集水质数据、实现自主运动控制,为养殖人员提供可靠的实时监测数据。
参考文献:
[1] 李道亮, 王恩培, 王柄雄, 等. 陆地巡检机器人关键技术及其在水产养殖中的应用前景 [J]. 农业工程学报 ,2024,40(21):1-13.
[2] 刘旭东 , 王爽 . 基于物联网的水下机器人设计与实现 [J]. 科学技术创新 ,2021,(19):182-183.
[3] 苏士博 , 刘浩煜 , 余敏 , 等 . 自主水下航行器编队流体动力特性分析 [J].舰船科学技术 ,2025,47(05):62-67.
[4] 李佳萍 , 宋妍霏 , 李思远 , 等 . 用于水质动态监测的渔业养殖管家 机 器 人 [J]. 现 代 信 息 科 技 ,2024,8(16):168-171+177.DOI:10.19850/j.cnki.2096-4706.2024.16.035.
[5] 於海明, 毕金生, 张鑫, 等. 水质参数对鱼类生长的影响及其水质检测方法与应用设备 [J]. 农业装备技术 ,2024,50(03):18-21.
[6] 李凤妹 , 黎潘 . 水产养殖溶解氧监测系统设计 [J]. 现代农业科技 ,2025,(07):156-158+174.
基金项目:2025 届“ 优秀本科毕业设计(论文)培育计划” 项目,BS202444,一种用于水下的养殖机器人
作者简介:孙炜喆(2002-),男,本科在读。
通讯作者:陈洁(1990-),女,硕士,副教授、工程师,研究方向为船舶类研究与教学。
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)