.jpg)
基于商用车电子制动系统的路面附着系数估算

郭伟锋 陈拓 晋毅东
陕西法士特汽车传动有限责任公司 陕西 西安 710119
前言
目前商用车制动系统仍多以传统气路制动系统为主,随着法规进一步完善,国内商用车电子制动系统的进一步得到发展。
商用车电子制动系统(EBS)的核心除了在于使用电信号替代气信号,使得制动相应更为迅速;另一方面在制动过程中,时刻监视和调整轮胎的状态,结合路面条件,估算轮胎纵向作用以及滑移状态,使得制动系统更好的利用和发挥路面条件。
这一过程中,系统对于路面条件的识 成为系统功能的先决条件。国内对于路面识别已有不少相关的研究。 方法研究较多,但依赖制动模型精度,并对实时性要求较高;有利 研究,但对于硬件和成本要求较高;有学者通过小波分析的方 依赖性且稳定性较好,但此方法难以实现实时识别,对于系统控制意义 另外, 以路面特征作为路面识别的相关研究,鲁棒性较好,识别较准确,但对于路面条件突变的工况识别效果一般
本文提出一种基于商用车 EBS 系统,融合附着曲线与系统传感器的路面识别方法。制动时根据 EBS 系统内各传感器信号对路面条件进行实时估算,然后使用递归最小二乘取得最优估计以提供给EBS 系统进行实时制动控制。本文最后基于上述方法进行实车制动测试,验证了此方法的准确性和可行性。
1 车辆制动模型
1.1 制动力系数
车辆在硬路面上制动时,制动力的大小与轮胎瞬时滑移率具有特定的关系。滑移率表明车轮运动中滑动所占比例,不同的滑移率具有不同的纵向制动力系数μ,即地面制动力与垂向载荷之比。
根据大量试验所得,纵向制动力系数在前段随轮胎滑移率的增大而变大,并达到最大值,称为峰值附着系数;在峰值附着系数过后,制动力系数随滑移率增大缓慢减小,直至达到纯滑动状态。因此控制车辆紧急制动过程中,轮胎取得峰值附着系数所对应的滑移率 s 是制动控制的核心[1]。一般的峰值附着系数 对应的滑移率在 15%~20(sm) 之间。而峰值附着系数根据路面的不同而不同,因此峰值附着系数亦称为路面附着系数。
图 1 制动力系数曲线
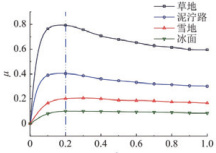
根据上述关系,可以进行路面附着系数的估算。认为滑移率 0~ μn 的区间与制动力系数成正比,采集该区间对应的 μ~s 数据,进行线性拟合,并在拟合曲线上求解与 对应的 μ 值即为估算的 。
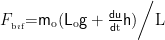
其中, μ 值无法直接采集,一般采用制动气压,相应的载荷并通过制动模型进行估算获得,即:
此时即可得到对应的小滑移率区间的 μ~s 曲线,估算出 。但由于制动模型精度所限,且这里的 μ 不是直接采用地面纵向制动力计算,制动力系数误差较大,本文后续进行优化,提升精度。
1.2 载荷模型
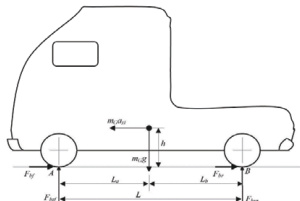
本文以双轴车进行研究,采用车辆在平直路面进行制动时,由于存在较大的纵向加速度,因此轴荷相应的前移,以各轮力矩平衡进行求解即可计算处各轮的实际载荷情况,由于理论成熟,这里直接给出结果 [2]。
其中, Fbıf 为制动时前轴载荷, Fbπ 为制动时后轴载荷,L 为轴距, 和 分别为质心到前后桥的距离,h为质心高度,  车辆瞬时减速度。
车辆瞬时减速度。
图 2 制动时车辆纵向受力模型
商用车由于货物质量相差较大,因此整备质量差别明显;整备质量一般根据纵向动力学进行估算,取车辆加速度较小时和动力传动系统结合时的发动机输出扭矩以及传动系统参数最优求解得到 |mo. ,这里对于估算过程不做赘述 [3] ;其他所用参数根据车型和整车厂标注获得,然后根据上述载荷公式得到各轴实时载荷,以备下文计算使用。
2 基于EBS 系统的路面附着估算
2.1 EBS 系统的附着系数
商用车 EBS 系统除了具备传统 ABS 系统所含的轮速传感器等,同时还配有 ESC 车姿传感器,SAS 方向盘转角传感器等,可以实时获得车辆的横向加速度,纵向加速度,横摆角度速度,转向盘角度等,后续引入传感器采集而来的纵向加速度  进行计算。根据上述制动力系数模型和载荷模型进行进一步推导,得到参数只含有直接获取常值或采集到的信号量进行路面附着估算 可洪 一步提高附着估算精度
进行计算。根据上述制动力系数模型和载荷模型进行进一步推导,得到参数只含有直接获取常值或采集到的信号量进行路面附着估算 可洪 一步提高附着估算精度
从经典附着系数模型出发,但这里 μ 的计算不使用制动模型,而直接对轮胎分析,可得前轮纵向力:

其中 为轮胎线速度的变化率。后轮纵向力:

进一步结合上述载荷模型, 前桥附着系数为:
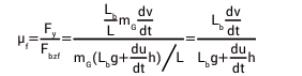
后桥附着系数计算为:
此时制动力系数的计算中仅含有运动学状态量以及整车基本参数,与制动模型,整车整备质量等无关;其
中du 直接根据 EBS 系统中 ESC 传感器读取 , 可以从轮速传感器信号差分得到,其他参数根据车型确定。同dt时由于ESC 传感器的安装位置受限,安装与质心位置存在偏移和旋转,且信号毛刺误差,因此须将传感器纵向
加速度信号进行加权均值滤波和旋转变换得到车辆质心实际的纵向加速度值,此时 和 可相应解算。FH
2.1 基于递归最小二乘法的路面附着估计
根据以上模型,可获取制动时对应的 μ~s 数据,并得到 μ~s 曲线的估算斜率。对于车辆制动控制实时系统,随着制动过程的深入,须根据 μ~s 曲线各点的估算斜率值求解最优斜率。本文对均匀硬路面进行研究,使用递归最小二乘法进行斜率实时最优求解,得到基于某次制动历史所有信号的最佳估计斜率,其中 μ~s 曲线斜率的递推公式可表示为:

为使估计方差和最小,其中修正增益矩阵 为:

其中更新的协方差矩阵表示为:
Pk=(1-KkH)Pk.1(1-KHk)T+KkR[vkJKT
图 3 路面附着递归最小二乘优化模型
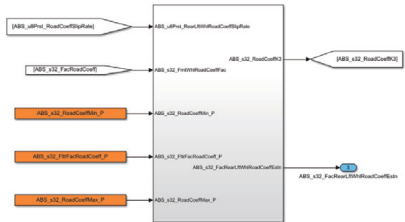
这里给出基于 Matlab/Simulink 搭建的用于优化路面附着的递归最小二乘法模型;模型输入对应的制动力系数与滑移率,初始值 Π=kΠ 的计算中,k 取1000000,另外为保证收敛准确性,模型对路面附着系数优化估算值设置0~10 的限制条件,同时可保证在样本点较少时即制动初期,快速且准确的进行路面识别。
模型收敛后的输出为当前最优 μ~s 曲线斜率,然后可结合 即可算出路面附着系数 [4] [5] m m
3 测试验证与结论
基于上述方法,在装有EBS 系统的车辆上进行测试验证。试验选用重汽汕德卡牵引 4*2 车型,在平直沥青路面与潮湿大理石路面进行连续制动测试,试验时主要覆盖紧急制动工况与中等强度制动工况。系统通过私有CAN 接收来自于轮速传感器,ESC 传感器的状态量,结合车辆参数进行计算。对于路面附着估算实时估算结果通过XCP 协议采集监视,结果如图4 与图5。
根据试验结果数据,较大强度的制动过程中,路面附着系数的估算基本与实际路面接近,实时性较好,所有车轮均在 50~100ms 内基本得到收敛的路面附着情况,对于制动时 ABS 等功能的介入和正确动作控制提供保障。
图 4 高附着(沥青)路面附着估算

可以看到,前轴的收敛精度略高于后轴估算精度,但整体精度均小于 0.1 且满足 ABS 等功能使用,这与制动时载荷前移前轮状态稳定以及信号传输路线短,延迟小等有关。本文所述估算方法更适合于均匀路面,对于路面情况变化较快的制动工况适应较慢。
图 5 低附着(潮湿大理石)路面附着估算

试验对于沥青路面与潮湿大理石路面附着系数的估算效果均比较良好,但在制动力较小时存在某一轮胎估算失效的情况,经过分析,系轮胎纵向力过小,滑移率接近于0,此工况EBS 系统无需启动防抱死功能,因此,该工况下的部分轮胎估算失效对于系统控制无实质影响。
最后,本文阐述了一种基于EBS 系统且结合内部各传感器参数的识别路面附着系数的方法,试验验证了其可行性。本文所述方法不需要额外增加硬件成本, 且实时性较好 工程实用性较强,有助于系统控制,提升性能。同时仍要意识到,所有方法均有利弊,此法在复杂道路情况下的识别准确度会受到限制,需结合其他策略进行修正。
参考文献
[1] 张新荣 , 王鑫 , 宫新乐 , 等 . 面向智能车辆的路面附着系数分段识别方法 [J]. 汽车工程 ,2023,45(10):1923-1932.
[2] 张磊 , 董翔宇 , 姚余磊 . 基于路面附着系数的道路识别算法研究 [C]// 中国汽车工程学会 . 第三十一届中国汽车工程学会年会论文集(1). 北京汽车研究总院;,2024:349-353.
[3] 王洪伟. 车辆复杂激励条件下路面类型识别与峰值附着系数估计[D]. 石家庄铁道大学,2023.
[4] 亓佳敖 , 冯静安 , 万文康 . 基于自适应容积卡尔曼滤波的路面附着系数识别 [J]. 石河子大学学报 ( 自然科学版 ),2023,41(03):274-278.
[5] 员荣祥. 基于图像信息和车辆状态的路面附着系数估计研究[D]. 燕山大学,2022.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)