.jpg)
基于三维机器视觉的辅料智能码垛研究与应用

杨拥军
河南中烟工业有限责任公司许昌卷烟厂 河南省许昌市 461000
1、研究背景
随着人口结构转变,传统生产制造型企业重脏累、重复机械型的岗位用工荒,劳力成本持续上涨等问题日益严重,越来越多企业选择通过自动化、智能化物料投产方式,高效率地替代人力的繁重工作,通过机器换人,助力智能制造跑出“加速度”。烟草行业内,卷烟辅材一直没有采用自动化配盘,还是延续人工操作,配盘效率低下,急需改进。
2、存在的问题
传统码垛机器人通常采用示教的方法,预先设定好抓起点和摆放点进行码垛。而卷烟辅材大多数采用软包、扁盘的堆垛方式,码放垛型不规则、抓取过程中内装材料松散及质心滑移等问题。这种刚性的码垛方式在实施过程中发现无法解决的抓取精度问题,一是供应商不同批次的卷烟纸、水松纸等辅料大小、高度等参数尺寸不尽相同,托盘摆放无法做到方向、高低的精准摆放。特别是余料盘,材料的数量和摆放位置无法把控,机器人抓取时经常会碰撞物料;刚性模式下机器人码垛不能够对生产线的复杂情况分析判断。
3、解决的难点
难点就在机器人抓取卷烟辅材的环节,怎样获取被抓取物料的精准的三维坐标。卷烟辅材如卷烟纸、水松纸、卡纸等这些材料数量多,单个材料高度低,需要坐标数据精准到毫米,如果依靠上一个层物料的坐标值加减,得到下一层材料的坐标值,偏差会越来越大,碰撞物料的机率就会增高。
4、主要研究内容
4.1 合适的 3D 摄像机
选择双目或多目 3D 成像摄像机是现在的主流。双目和多目立体视觉要求目标物体纹理或几何特征清晰,主动立体视觉测量增加了投射器,投射特定光源模式到被测物体表面,借助于投射的光源模式,从而提高匹配精度及测量精度。所以选择主动视觉相机更符合卷烟辅材的成像。
4.2 选择合适的图像处理软件和合适的算法建模
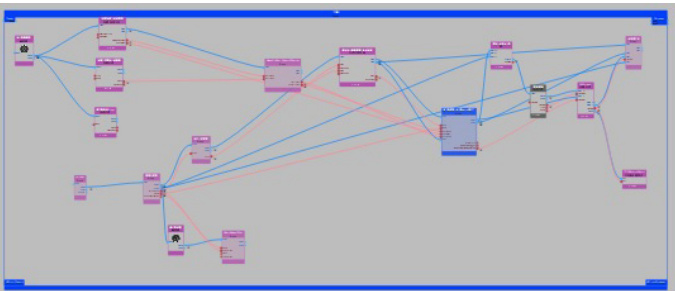
对于视觉图像处理软件及算法的选择,市场上有多家视觉处理软件在推广。其中图漾科技 RVS 机器人视觉软件平台,通过内置大量的 2D/3D 视觉算法库、模拟仿真工具等功能模块,支持 Windows/Linux 操作系统下全流程的低代码拖曳式开发,通过高仿真可视化的直观操作,开发者无需了解底层技术,即可高效实现物体识别和分割、机器人引导、运动规划和手眼协同等应用的二次开发。
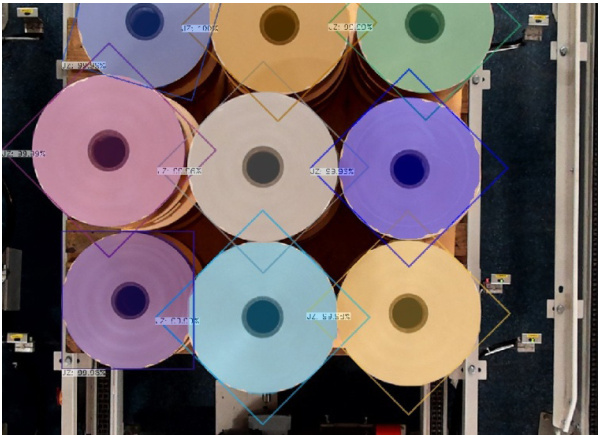
机器视觉三维建模之后,用 SIFT 多目标特征点提取算法,可以对辅料进行局部特征匹配 , 最后通过中心矩计算,得到卷烟纸、水松纸、玻璃纸的中心位置的 X、Y、Z 坐标。所以,图漾科技 RVS 机器人视觉软件平台非常适合卷烟辅材自动化配盘现场的图像处理。
码垛辅料多维度特征提取
4.3 建立可靠的数据传递
图漾科技相机开发有专业的 SDK 开发工具集合,是专为开发者提供的软件开发工具集合,主要用于实现与相机硬件及软件的交互,包含与相机硬件通信所需的驱动程序和接口,提供预编写的代码库、类库及 API 接口,帮助开发者实现图像采集、处理、传输等高级功能,更适合许昌厂卷烟辅材自动化配盘使
用场景。
4.4 升级机器人软件版本,具有AI 算法功能
针对由于场地的限制,没有太多的抓取工位,要在有限的工位上实现多种物料的柔性进场,就需要升级机器人的控制系统版本。版本应具有AI 算法功能,可以利用卷积神经网络进行自学习,实现精准抓放和智能避障功能。
基于 AI 算法,机器人利用卷积神经网络进行自学习,不用再固定抓取动作和顺序。通过对所述码垛训练三维模型进行信息标定,生成训练集;再基于AI 自学习算法,通过对所述训练集进行预设障碍场景识别,生成测试集。再通过所述测试集对模型赋值算法进行开发,生成辅料码垛物料模型的自动抓取算法。最后通过三维模型复合,生成各品种辅料码垛的三维模型。
5、方案应用:
卷烟辅材自动化配盘的 3D 视觉智能码垛系统方案的优化,主要由 3D 工业相机、深度学习算法及RVS-SE 软件、工业PC 及工业机械臂等共同构成。
5.1 图像获取
3D 摄像机安装于辅料托盘的顶部,获取符合测量精度的图像。
方案可采用 PM806 型主动双目摄像机,双摄像头 + 彩色辅助摄像头 + 红处光源的组合,测距范围 1250mm-4300mm ,测量精度 1—5mm,符合卷烟辅料智能码垛现场的要求。
5.2 图像处理
RVS 机器视觉软件平台可以对辅料进行局部特征匹配 , 最后通过中心矩计算,得到卷烟纸、水松纸、玻璃纸的中心位置的 X、Y、Z 坐标。并将图像坐标经过转换,传输给机器人系统。卷烟辅料的图片推理模型和生成的标签,也一并传输给机器人系统。
5.3 机器人 AI 训练
机器人软件系统升级,具有AI 算法功能。
通过 AI 训练,机器人不再用固定抓取动作和顺序,可以根据三维模型进行智能抓取。每一次抓取都要根据建立的三维模型和上一步的抓取动作进行比较,选取最优的抓取位置和运行路线,
6、结论
通过研究与测试,引入三维机器视觉系统,以精准地对卷烟辅料的中心矩进行计算,得到中心位置的 X、Y、Z 坐标,解决了辅料智能定位的问题。用 AI算法进行训练机器人,可以根据三维模型进行智能抓取和避障。告别了效率低下的人力配盘,可以实现卷烟辅料配盘环节的自动化、信息化、智能化。
参考文献:
[1] 刘振宇 , 李中生 . 基于机器视觉的码垛机器人系统研究 [J]. 组合机床与自动化加工技术 , 2014(4):7.
.jpg)
.jpg)
.jpg)
.jpg)