.jpg)
基于蓝牙耳机内置陀螺仪的头部转向识别算法研究

谢红芝 陈国鑫
大连金华录数码科技有限公司 辽宁大连 116000
1、引言
随着无线通信技术和传感器技术的飞速发展,蓝牙耳机已成为人们日常生活中不可或缺的音频设备。传统蓝牙耳机主要以音频播放和通话功能为主,而如今,为满足用户日益增长的智能化交互需求,诸多先进传感器被集成其中,陀螺仪便是重要的一员。
陀螺仪能够精确测量物体的角速度和角加速度,将其应用于蓝牙耳机,可实现通过头部动作控制耳机功能、提供沉浸式音频体验等创新应用。准确判断头部的左右转向,不仅能丰富用户与蓝牙耳机的交互方式,如通过转头实现音乐切换、接听挂断电话、调节音量大小等,还能在虚拟现实(VR)、增强现实(AR)场景中,与其他设备协同工作,为用户打造更加自然、流畅的交互环境。因此,研究基于蓝牙耳机陀螺仪的头部转向识别算法具有重要的理论意义和实际应用价值。
2、陀螺仪工作原理
2.1 基本原理
陀螺仪的基本原理基于陀螺效应,即高速旋转的物体具有保持其旋转轴方向不变的特性。当陀螺仪内部的振动结构以一定频率振动时,若外部载体(如佩戴蓝牙耳机的头部)发生转动时,旋转轴与振动方向产生科里奥利力,而振动结构会受到垂直于其振动方向和载体转动方向的科里奥利力作用,从而产生微小的位移变化。通过检测这种位移变化(通常通过电容变化等方式),并经过复杂的电路和算法处理,即可输出精确的角速度数据。
2.2 坐标系、角速度与角加速度定义
为准确描述头部的运动状态,在陀螺仪应用中,通常定义一个三维坐标系。以耳机佩戴者头部的正前方为 x 轴正方向,头顶向上为 z 轴正方向,根据右手定则,垂直于 x 轴和 z 轴所在平面且指向右侧为y 轴正方向。
角速度(Angular Velocity)表示设备绕某一轴旋转的速率,即单位时间内转过的角度,体现头部转动的快慢和方向。角加速度(AngularAcceleration):角加速度表示角速度变化的快慢,即单位时间内角速度的变化量,体现头部动作的剧烈程度
陀螺仪测量得到的角速度分量 ωx、ωy、ωz为后续头部转向识别提供了基础数据。
3、头部转向识别算法
3.1 数据采集与目标轴确定
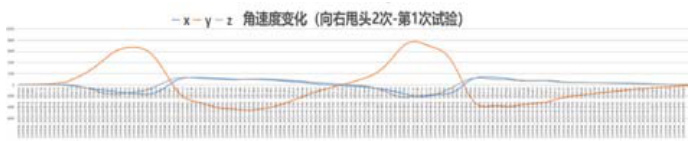
蓝牙耳机内置的陀螺仪以一定的采样频率(如 100Hz )持续采集头部运动的角速度数据 ω(t)。通过让用户缓慢左右转头,观察陀螺仪数据变化,观察哪个轴的角速度变化最显著,确定实际转动对应的陀螺仪轴(下图是实验中得到的陀螺仪数据变化,可看出目标轴为 y 轴),确定目标轴后,后续仅处理该轴数据(例如gyro_y)。
3.2 数据预处理
由于实际采集的数据可能包含噪声和干扰,首先需进行滤波处理。采用低通滤波器去除高频噪声,保留反映头部运动趋势的低频信号。同时,在静止时计算陀螺仪偏移量,实时数据中减去该偏移进行校准,这样可消除传感器零点漂移等误差,确保数据的准确性和可靠性。
3.3 阈值判断法识别头部转向
在预处理后,通过检测陀螺仪绕目标轴(如 y 轴)的角速度是否持续超过阈值,直接判断头部转动的方向。当右转时,角速度持续正向超过阈值。当左转时,角速度持续负向超过阈值。
3.4 算法优化与抗干扰措施
为提高算法的准确性和鲁棒性,考虑到实际使用场景中的各种干扰因素,如身体其他部位的运动、外界震动等,对算法进行优化。在算法实现部分,阈值的选择是关键。需要多采集一些样本数据来确定合适的阈值和持续时间,比如通过让不同用户多次左右转头,记录角速度的最大值和持续时间,找到合适的触发条件。为过滤瞬时抖动(如咳嗽、走路震动),持续时间需要找到一个平衡点(如0.1s),太短(0.05s)容易误判断,太长(0.2s),延迟明显。此外,算法中增加二次验证,检测到方向后,再检查后续 50ms 内角速度是否维持同方向。
3.5 实验结果与分析
将采集到的数据输入到开发的头部转向识别算法中进行处理,统计算法判断结果与真实标签的一致性。实验结果显示,算法对头部向左转的识别准确率还是较高的。通过对误判样本的分析,发现主要误判原因集中在头部运动幅度较小、运动速度过慢或外界干扰较大的情况下。针对这些问题,进一步优化算法参数和阈值设定(如角速度持续超过正阈值 (+1.5Δrad/s) )达 100ms 判断为右转),经过再次实验验证,总体准确率得到提高,满足了实际应用的基本要求。
4、结论与展望
本文成功开发了一种基于蓝牙耳机陀螺仪角速度数据的头部转向识别算法。通过深入研究陀螺仪工作原理,设计了完善的数据处理流程和判断机制,并通过实验验证了算法的有效性和准确性。该算法为蓝牙耳机智能化交互提供了核心技术支持,未来有望在智能家居控制、虚拟现实交互、智能驾驶辅助等领域得到广泛应用。
然而,目前算法仍存在一定的局限性,如在复杂运动场景下的准确性有待进一步提高,对低功耗、实时性的优化还需加强。未来的研究将聚焦于改进算法模型,引入深度学习等先进技术,进一步提升算法的性能和适应性。同时,探索与其他传感器的深度融合,实现更全面、精准的人体运动状态感知,为智能设备的交互创新提供更多可能性。
参考文献:
[1]《基于陀螺仪的蓝牙耳机控制系统及方法》
[2]《微机电系统(MEMS) 元器件、电路及系统集成技术和应用》
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)