.jpg)
香港11米高速垃圾收集船的智能化升级与验证

邓柱豪
佛山南海珠峰造船有限公司 佛山 528244
关键词:垃圾收集船;智能化改造;垃圾识别;智能决策;一人操作;海域治理
中图分类号:XXXX.XX 文献标识码:A
Abstract:Aiming at the problems of low efficiency and insufficient accuracy caused by the reliance on manual identification and operation in the traditional operation mode of Hong Kong's 11-meter high-speed garbage collection vessels, this paper proposes an intelligent transformation technical scheme. Based on the closed-loop architecture of "Perception Layer - Central Layer - Execution Layer", the scheme achieves accurate identification of marine garbage (with an accuracy rate of ≥90%) through an intelligent garbage monitoring system, completes data-driven decision-making by means of an intelligent collection information integration platform, and optimizes the bucket operation control mechanism to realize the "one-person operation" mode. After the transformation, while maintaining the original speed (19.8 knots) and collection capacity (0.85 tons per voyage), the vessel's operation efficiency is increased by 30%, the crew size per vessel is reduced from 2 to 1, and the annual labor cost is saved by approximately HK\$150,000. This paper elaborates on the system design, technical implementation and verification results in detail, providing a reference for the intelligent upgrading of similar vessels.
eywords:Garbage collection vessel; Intelligent transformation; Garbage identification; Intelligent decision-making; One-person operation; Marine area governance
1 前言
随着海洋垃圾治理需求的日益增长,传统水域垃圾收集船的作业模式已显不足。这些船舶多依赖人工操作(单船定员2 人:1 人驾驶、1 人操作收集装置),导致效率偏低、适应性有限、垃圾识别精准度不足等问题。以香港为例,专业清理船队年均清除海上垃圾约 4000 吨,但现有船队多为低速船型,在应急响应和精准作业方面存在明显短板。2024 年3 月,香港引入了4 艘11 米高速垃圾收集船(最高航速19.8 节),虽提升了响应速度,仍无法满足高质、高效的治理需求(如垃圾识别依赖人工经验)。
本文旨在解决上述问题,通过智能化改造实现“减员提效”目标:减少定员、提高效率、保持性能。改造方案基于闭环系统架构,结合AI 技术实现自动化作业。研究背景源于香港政府对海域治理的迫切需求,以及船舶工业向智能化转型的趋势。本文结构包括:原船设计概述、智能化改造总体架构、技术方案详述、作业流程优化、改造成效分析及未来展望。
2 原船设计概况
原船为针对香港狭窄航道与浅滩区域设计的铝合金高速小型垃圾收集船,具有优异的耐波性与快速性。以下从船型参数、推进系统和收集装置三方面详述。
2.1 船型及主尺度参数
船舶总长 11.00 米、船体长 10.60 米、型宽 2.75 米、型深 1.45 米、设计吃水 0.65 米、满载排水量6.4 吨。采用单体排水型深V 高速船型,配合倒三角形艏部结构,兼顾铲斗安装需求与狭窄水域机动性。最高航速达19.8节,满足高速响应要求。(外形型如图 1)
图1 11 米香港高速垃圾收集船

2.2 推进系统的配置
为平衡船舶航速性能与运营成本,并符合香港禁止使用汽油主机的法规,原船采用桨轴机推进方式,配置单机、单桨及单舵,该系统确保船舶在作业中保持高效动力输出,同时降低能耗。
2.3 垃圾收集装置
装置以“轻量化+功能性”为设计原则,采用“龙门架+电动绞盘+ 铲斗”的组合方案。
龙门架:固定于船体中部,平衡作业重心,为铲斗翻转提供稳定支撑;
电动绞盘:拉力 4500LB,电压 24V,功率 1.2KW,适配小艇低压供电系统,通过钢丝绳驱动铲斗动作;铲斗:设计负荷 0.2t,旋转铰接杆与甲板肘板插销连接,可实现水面收集、翻转卸料及固定收纳三种状态切换。
作业程序依赖人工操作:铲斗的旋转铰接杆与甲板肘板插销连接,可自由翻转,铲斗中部伸长杆由电动绞盘钢丝牵引;作业时,铲斗降至水面以过滤的形式收集垃圾;当收集完成,铲斗由电动绞盘牵引,翻至限位器最大角度,通过人工刮拨垃圾至垃圾收集箱内;作业完成后,铲斗装置翻至稍微离开水面并通过甲板的固定装置固定。但该设计存在局限,包括垃圾识别及装载量判断均需人工经验,易导致效率低下。
3 智能化升级改造总体架构
智能化改造的目标是突破原船局限,实现“减员提效”(减少定员、提高效率)。核心架构是构建“感知层-中枢层-执行层” 的闭环系统:
感知层:通过垃圾智能监测系统实时采集海面垃圾分布与铲斗装中枢层:由智能收集信息集成平台处理数据,生成决策指令。
执行层:改造铲斗控制机制,实现,实现“1 人操作”的自动作业;系统在船舶局域网内运行,确保数据交互实时性。改造后,船舶可维持原航速和收集能力,同时重心通过优化控制。
4 智能化改造技术方案
方案围绕三个分目标制定:功能目标(垃圾监测、装载预警、远程操控)、性能目标(识别准确率≥90%、效率提升 30% 、定员减至1 人、航速不变)、安全目标(故障时切换手动模式)。以下分述各子系统设计。
4.1 智能化系统设计
船舶智能化垃圾收集系统采用三级闭环架构,包括“感知层、中枢层、执行层”,通过船舶局域网实现数据交互,设计 3 个层级的子系统包括:
(1)垃圾智能监测系统(感知层):负责海面垃圾分布与铲斗装载量的实时数据采集。
(2)智能收集信息集成平台(中枢层):接收感知层数据后,完成垃圾分布热力图绘制、装载量计算,并生成作业指令。
(3)收集系统(执行层):对电动绞盘加装伺服控制器,中枢层通过钢丝长度的控制,驱动铲斗完成收集、卸料、复位动作;系统保留手动操作杆作为冗余,确保故障时独立运行。数据通过船舶局域网交互,避免外部干扰。
智能化垃圾收集系统三级闭环架构布置如图 2
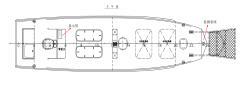
图2 11 米高速垃圾收集船智能化改造系统设计图
4.2 垃圾智能监测系统设计
垃圾智能监测系统由图像传感器、光学镜头、信号处理系统组成,安装在船艏。
系统工作流程:采用光学镜头配合滤光片采集图像,图像传感器将图像信号转换为电信号,图像处理芯片分析垃圾分布与数量以及铲斗装载数量,数据实时反馈至智能收集信息集成平台。硬件选型严格遵循轻量化原则,总重量控制在15kg 以内,安装位置避开铲斗作业半径,确保视野无遮挡。
4.3 智能收集信息集成平台设计
平台由数据接收模块、智能分析模块、决策指令模块、报警与记录模块组成,通过布置在驾驶室驾控台上的显示屏,显示垃圾分布信息、铲斗垃圾装载量信息、收集装置控制按钮及装载预警按钮等,支持船员一键式操作。
智能收集信息集成平台的功能是实现垃圾监测数据的统一集成、分析及信息显示,用于支持垃圾智能监测系统、绞盘控制系统等应用需求,实现对船舶收集垃圾的监测和智能化管理。
4.4 铲斗作业智能控制机制
铲斗作业智能控制机制是“执行层”的核心,通过改造原有机械系统,实现“自动- 辅助”协同作业,该机制联动作业程序如下:
(1)自动收集:平台根据垃圾分布指令,控制绞盘释放钢丝绳,铲斗翻转至水面预设角度,保持该姿态船前进收集。
(2)辅助卸料:当装载量达到预警值时,船员确认卸料后,平台指令绞盘回收钢丝绳,铲斗翻转至最大角度,人工辅助完成卸料。铲斗翻转至最大角度时,平台指令绞盘预放一定量的钢丝绳,为后续复位作准备。
(3)辅助复位:卸料后,船员手动将铲斗推至钢丝绳预放角度,按“复位”键后,绞盘放绳使铲斗翻转至离水面 0.5m 处,通过甲板固定装置锁定。
联动过程中三级安全机制包括软件限位(最大翻转角度)、硬件限位(机械挡块)、紧急停止按钮,确保操作安全。
4.5 船舶重量控制与重心调整
(1)新增设备重量分析
新增设备总重 30kg,需通过优化设计以维持船舶性能。智能化系统各组件重量如表1 所示
表1 船舶智能化改造新增设备重量

(2)优化措施与验证
重量控制:设备轻量化选型:优先选用铝合金外壳设备,如监测系统防护罩采用铝合金,比钢制减重 40% 。合集成平台主机与驾驶台原有结构,利用原有支架固定,减少新增支撑结构重量。
重心调整:基于原船空船重量数据(含50kg 固定压载),新增设备导致重心前移约0.1m。通过减少原船30kg固定压载,并调整其位置前移 0.5m ,使纵倾控制在 ±0.2°以内。确保船舶浮态与稳定性。
实船验证:改造完成后进行倾斜试验,测量实际重心位置,通过微调压载确保最大航速能达到 19.8kn
5 船舶作业流程优化
改造技术方案实施后,船舶的作业流程简化为“一人操作”模式,全程由1 名船员完成。新的作业流程将人工介入减至最低,作业效率提升 30% 。优化后的船舶作业流程如下:
(1)启动与扫描:船舶开动保持作业航速,启动智能监测系统扫描水面,平台生成垃圾分布热(2)垃圾收集:船员确认作业区域,根据平台信息发出指令,控制铲斗进行垃圾收集;
(3)卸料操作:装载量预警时,平台提示卸料,船员按卸料指令,铲斗翻转至最大角度,船员辅助完成卸料。
(4)复位与锁定:卸料完成后,人工辅助铲斗翻转至指定角度,船员启动平台指令复位,铲斗翻转至离水面预设位置,通过甲板固定装置锁定。
(5)作业结束:作业结束返航。
6 改造成效与展望
经实船测试验证,改造方案有效可行,达到设计目标。并实现了对原船局限的技术突破。
6.1 改造成效与效益
降低人工成本:实现一人操作全流程,定员从 2 人减至 1 人,年节约人工成作业效率提升:智能监测系统将垃圾搜索时间缩短 30% ,作业效率明显提升;
作业精准度与安全增强:垃圾识别准确率达 90% ,超载报警响应时间≤1 秒,避免因装载不当导致的安全风险。性能参数保持稳定:经实船测试,验证改造技术方案有效可行,改造船舶各项性能参数均达到设计指标,最大航速保持19.8kn,垃圾收集能力保持 0.85t/航次。
改造效益:满足香港政府对提高海域治理效率的需求,还为船东带来“减员增效”的收益;本研究方案,可推广到香港海域清理船队其它船舶进行升级改造,社会和经济效益更加明显。
6.2 未来优化方向
AI 深度应用:引入强化学习算法,实现垃圾收集路径的自主动态规划,适应复杂水域环境。
远程运维:开发岸基远程控制功能,在紧急情况下实现无人化作业,进一步提升安全性。
多船协同:构建船队智能调度系统,实现多船协同作业,覆盖更广海域。
参考文献:
[1]《商船(本地船只)条例》(第548 章),香港立法会,2025
[2]《商船(本地船只)(安全及检验)规例》(第548 章,附属法例 G),香港立法会,2025
[3]《工作守则—第Ⅱ类别船只安全标准》,香港特别行政区政府海事处本地船舶安全组,2025
[4]《小型海船入级规范》,中国船级,2021
作者简介:邓柱豪(1981-),男,工程师,主要从事船舶电气设计工作。
投稿日期:2025-8-3
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)