.jpg)
模糊控制理论在医疗环境新风系统中的应用研究

彭靖
重庆城市职业学院 重庆市 402160
1 引言
新风系统作为调节医疗环境空气质量的核心设备,有着引入室外新鲜空气、稀释室内污染物、维持合理气压梯度,像洁净区正压、污染区负压,以及辅助调节温湿度等关键任务。例如手术室需要极高的洁净度,普通病房要求适中,而呼吸道传染病房需要强负压隔离[1]。这些特点让医疗环境新风系统的运行工况极为复杂多变 [2]。基于此,本文重点研究模糊控制理论在医疗环境新风系统中的创新应用,核心以便:设计一种智能化程度高、鲁棒性强、能效优异的模糊控制策略,用来解决传统控制方法在应对医疗环境复杂性时存在的不足。
2 模糊控制系统模型构建
2.1 医疗环境新风系统控制需求与难点分析
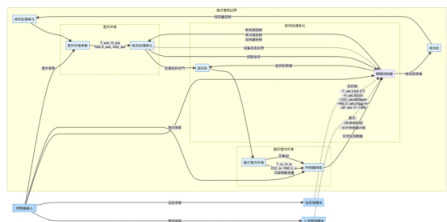
医疗环境新风系统的核心控制目标可被概括如下:核心目标一是保证空气质量得到保障,核心目标二是维持热舒适性,核心目标三是进行压力梯度控制,核心目标四是实现高能效运行,其有强非线性与时变性、多变量强耦合以及大滞后性等特点,并且目标之间存在权衡关系,干扰众多且难以预测。基于上述需求以及难点,构建了一个多输入多输出即MIMO 的模糊控制系统模型,具体如下图所示[4]。
图1 多输入多输出控制系统模型
3 模糊控制系统设计与实现
3.1 系统硬件架构
一个完整的基于模糊控制的医疗环境新风系统,一般会包含以下这些硬件,传感器网络方面,室内设有 CO2 传感器、PM2.5 传感器或者更高级的粒子计数器、温湿度传感器以及微压差传感器,微压差传感器设置在关键区域间,部署这些传感器的时候,要考虑空间的代表性,防止出现监测死角。室外则有温湿度传感器和 PM2.5 传感器,在风管或者机组那里,设有风量传感器,它是可选的,主要用于风量平衡反馈,以及滤网压差开关,用来监测滤网堵塞情况,辅助设备有人员计数器,借助红外或者视频技术来计数,以及门磁开关,用于监测门的意外开启,执行机构包括变频送风机和变频排风机[5] [6]。
3.2 软件设计与算法实现
模糊控制器核心算法中,首先进行输入变量计算,算出各偏差e_*,其等于测量值减去设定值。接着对每个输入变量的精确值,计算其属于各个模糊子集的隶属度 μ ,然后是模糊推理过程,要遍历模糊规则库中的所有规则,对于每条规则,计算其前提条件的激活强度 ∝ ,一般使用取小或乘积算子来计算前提中各子句隶属度的组合,这里针对 AND 连接情况,依据激活强度 ∝ ,按照规则结论,对输出模糊变量进行“切割”或“缩放”,采用 Mamdani 法 [7],得到该规则对应的输出模糊集合。将所有被激活规则产生的输出模糊集合进行并操作,一般取隶属度最大值,得到总的输出模糊集合,之后进行解模糊化,对每个输出变量总的模糊集合,应用重心法计算其精确的输出值 U,U 等于离散点 y_i 与其总隶属度  乘积之和除以总隶属度之和,这里是离散化近似计算,其中 y_i 是输出论域上的离散点, 是该点的总隶属度。最后进行输出限幅与处理,对计算出的精确控制量 U 进行限幅,防止超出执行机构范围,并根据实际需要转换为实际控制信号,比如 0- 10V、 4-20mA 、PWM 占空比,或者特定协议的指令 [8]。
乘积之和除以总隶属度之和,这里是离散化近似计算,其中 y_i 是输出论域上的离散点, 是该点的总隶属度。最后进行输出限幅与处理,对计算出的精确控制量 U 进行限幅,防止超出执行机构范围,并根据实际需要转换为实际控制信号,比如 0- 10V、 4-20mA 、PWM 占空比,或者特定协议的指令 [8]。
高级功能模块里的模式管理,依据时间段,如夜间、周末,或者特殊事件,如手术进行中、消毒后通风,又或者手动指令,切换到预设的控制模式,如夜间低风量模式、消毒后大风量模式、节能模式,这一般需要临时修改设定值。
3.3 模糊规则库的离线优化与在线自整定策略
借助模型仿真,建立医疗环境以及新风系统的简化动态模型,例如利用 EnergyPlus、TRNSYS 或者 Matlab/Simulink 来实现这一目标,依据历史数据挖掘,分析现有系统或者类似环境的众多历史运行数据,以确定在不同输入变量组合情况下,最优的控制输出到底是什么,在此需要定义“最优”的量化指标,例如综合评分等于空气质量达标率权重加上舒适度权重再减去能耗权重。采用数据驱动方法,如模糊C 均值聚类、决策树、神经网络等,从数据中提取或者修正模糊规则[9]。
4 仿真分析与实验验证
为验证所提出模糊控制策略的有效性,本研究进行了详细的仿真分析和实地实验对比。
4.1 仿真环境搭建与场景设定
仿真平台方面,运用 Matlab/Simulink 构建医疗环境以及新风系统的动态模型,这里以一间标准手术室和一个普通病房区域作为示例,房间模型涉及热质量、空气容量、污染物产生源,其中污染物以 CO2、PM2.5 作为代表性指标,其产生源基于人员密度和活动强度进行建模,同时还包括门窗渗透以及空调送 / 回 / 排风气流组织,采用简化混合模型。新风机组模型包含风机,风机功率与转速存在立方关系,以及风阀,有流量特性,表冷 / 加热盘管有热交换效率,过滤器有压降 - 风量特性及过滤效率,加湿 / 除湿单元有其效率模型,室外环境模型输入变化的室外温湿度、CO2 背景浓度、PM2.5 浓度,这些数据基于实测或典型气象年数据。控制对象方面,对比两种控制器作用于同一模型,传统 PID控制器为 CO2、PM2.5、温度、湿度、压差分别设计独立的 PID 回路,PID 参数按经验或 Z - N 法整定,本文设计的模糊控制器 (FC) 使用第 3章设计的MIMO 模糊控制器[10]。
仿真场景 (24 小时典型日):
场景1 ( 手术室):08:00-08:30: 准备阶段(人员中等,污染物散发中等)。08:30-12:00: 手术进行中(人员高且稳定,污染物散发高)。12:00-13:00: 术后清理(人员中等→低,污染物散发短暂高峰后下降)。13:00-18:00: 待机 / 清洁(人员很低)。室外: 白天温度升高、PM2.5 浓度上午偏高下午改善。场景2 ( 病房区):07:00-09:00: 晨间护理、查房(人员密度高且波动大)。09:00-11:30: 常规活动(人员中等)。11:30-13:30: 午餐、午休(人员密度变化大,活动降低)。13:30-17:00: 探视时段(人员密度再次升高,波动性强)。17:00 后: 晚间活动(人员密度逐渐降低)。室外: 全天温湿度变化,PM2.5 稳定中等。4.2 性能评价指标空气质量指标:CO2_Max: 仿真 / 实验周期内室内CO2 浓度最大值 (ppm )。
CO2_Avg: 平均值 (ppm )。
CO2_StdDev: 标准差 (ppm)- 反映波动性。
CO2_Exceed_ Time(%) : CO2 浓度超过设定值(如 800ppm )的时间占比。
 : 室内PM2.5 浓度最大值 (μg/m3) 。
: 室内PM2.5 浓度最大值 (μg/m3) 。
PM2.5_Avg: 平均值 (μg/m3) 。
PM2.5_StdDev: 标准差 (μg/m3) 。
PM2.5_Exceed_Time (%) : PM2.5 浓度超过设定值(如 35μg/m3 )的时间占比。
热舒适指标:
T_Max/Min: 温度最大 / 最小值 (° C)。
T_Avg: 平均温度 (° C)。
T_StdDev: 温度标准差 (° C)。
T_OutOfRange_Time (%) : 温度超出设定范围(如 22-26∘ C)的时间占比。
H-Max/Min : 湿度最大 / 最小值 (%) 。
H_Avg: 平均湿度 (%) )。
H_StdDev: 湿度标准差 (%) 。
H_OutOfRange  : 湿度超出设定范围(如 40-60% )的时间占比。
: 湿度超出设定范围(如 40-60% )的时间占比。
压力控制指标:
ΔP_Max/Min: 压差最大 / 最小值 (Pa)。
ΔP_Avg: 平均压差 (Pa)。
ΔP_StdDev: 压差标准差 (Pa)。
ΔP_OutOfRange_Time (%) : 压差超出设定范围(如 +15±3Pa )的时间占比。
能耗指标:
Total_Energy: 新风系统总能耗 Γ(kWh) ,包含风机能耗、冷热源能耗(按COP 折算)、加湿/ 除湿能耗。
Fan_Energy: 风机能耗 (kWh)。
Thermal_Energy: 冷热源能耗 (kWh)。
控制品质指标:
IAE (Integral of Absolute Error): 对关键偏差(如 e_CO2, e_T)的绝对误差积分,反映累计误差大小。
ISE (Integral of Squared Error): 误差平方积分,对大误差惩罚更重。
ITAE (Integral of Time-weighted Absolute Error): 时间加权绝对误差积分,强调消除长时间存在的误差。
4.3 仿真结果与分析
下表展示了手术室场景下,PID 控制与模糊控制(FC)的主要仿真结果对比:
表1:手术室仿真场景性能指标对比
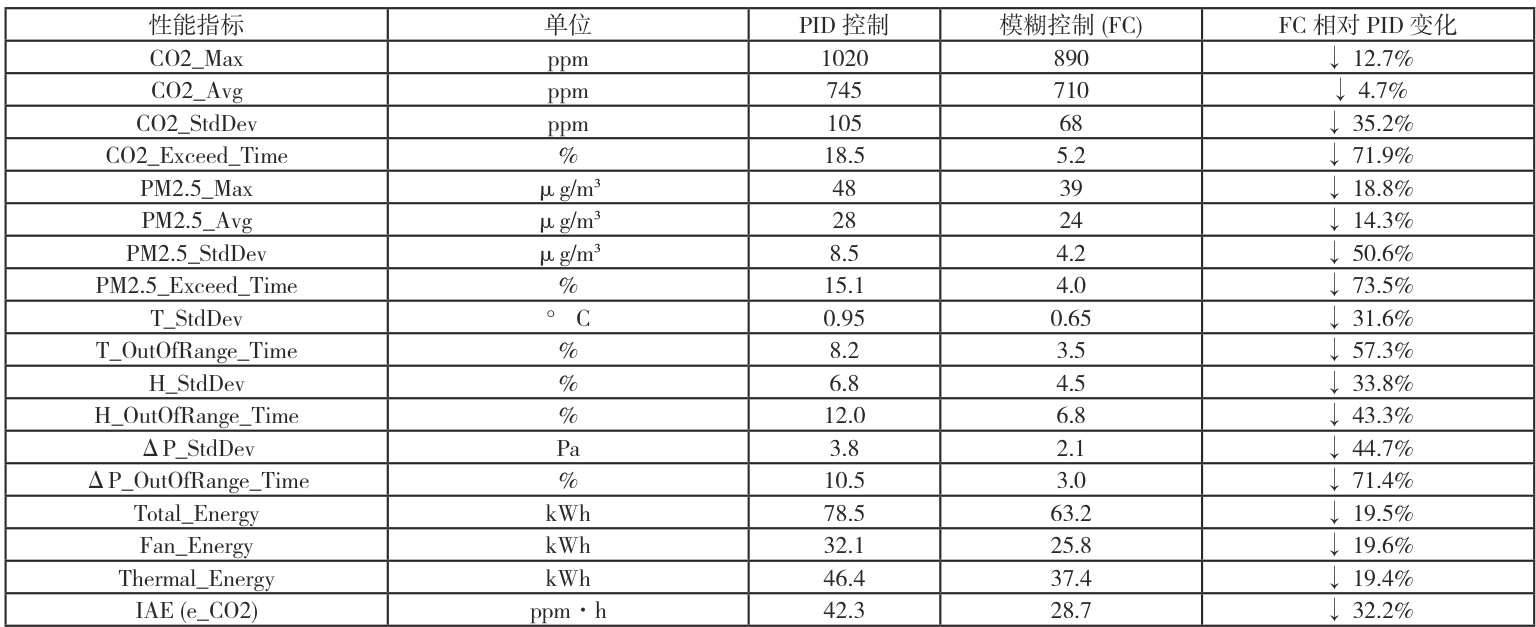
空气质量方面,FC 在各项关键空气质量指标上比 PID 更具优势,CO2 和 PM2.5 的波动性,也就是StdDev,分别下降了 35.2% 和 50.6% ,这意味着 FC 可更稳定地维持室内污染物浓度,更值得注意的是,污染物超标时间,即 Exceed_Time,大幅减少了 70% 以上,极大地提升了空气质量保障的可靠性,这对于手术室来说非常关键。热舒适与压差方面,FC 在温湿度稳定性以及压差控制精度上同样呈现出优势,标准差分别降低了 31.6% 、 33.8% 和 44.7% ,超出舒适或设定范围的时间较大减少,幅度在 43% 到 71% 之间,FC 可协调多变量控制,能耗方面,最让人惊喜的结果是,在提升空气质量稳定性和保障率的 FC 系统的总能耗降低了 19.5% ,其中风机能耗降低了 19.6% ,冷热源能耗降低了 19.4% 。节能主要源于以下几点:预见性调节,利用人员密度预测,在人员聚集前提前小幅提高风量,避免了 PID 在污染突然增加时的剧烈响应,也就是大幅提速,以及后续的振荡调整过程,使得风机运行更加平稳高效,协同优化,模糊规则综合考虑了新风引入,也就是冷热负荷,和回风利用,也就是节能潜力之间的平衡。比如在室外空气质量良好且负荷允许时,FC 会适当增大新风比并降低过滤等级或风机转速,就像规则示例 4 那样,减少无效动作,FC 的平滑输出减少了风机、阀门、冷热源设备的频繁启停和大幅调节,降低了过程损耗 [11]。
5 结论
本研究不仅为医疗建筑提供了经临床验证的智能控制范式,其融合模型经适配已在生物实验室、半导体车间等精密环境推广应用,为ISO 14644/GMP 标准场景提供核心技术支持。随着《医疗建筑节能设计标准》GB 51039-2024 的实施,该技术将成为绿色智慧医院建设的标准化解决方案。
参考文献
[1] 模糊控制原理与应用 [M]. 诸静等著. 机械工业出版社.2005
[2] 智能控制理论和方法 [M]. 李人厚编著 . 西安电子科技大学出版社 .1999
[3] 灰色神经网络在 MBR 曝气强度中的应用研究 . 史亚威 ; 李春青 . 软件工程 ,2016(11)
[4] MBR 中膜污染的人工神经网络预测研究进展 . 张浩良 ; 刘聪 ;洪乾坤 ; 王侃鸣 ; 王红宇 . 工业水处理 ,2022(07)
[5] 关于遗传算法优化的最小二乘支持向量机在 MBR 仿真预测中的研究 . 聂敬云 ; 李春青 ; 李威威 ; 王韬 . 软件 ,2015(05)
[6] 基于人工神经网络的 MBR 膜污染研究现状 . 樊吉霖 ; 刘洪波 ;薛祝缘; 王婧馨; 王换男; 张睿思. 膜科学与技术,2021(04)
[7] 基于改进极限学习机的MBR 仿真预测研究. 杨新星; 李春青. 软件 ,2016(12)
[8] 基于神经网络的 MBR 仿真预测的研究 . 闫宏英 ; 李春青 . 电脑知识与技术 ,2012(16)
[9] 基于无线 Mesh 网络的 MBR 污水处理监控系统的设计与实现 .高美娟 ; 张帆 ; 田景文 . 机床与液压 ,2008(07)
课题项目本文系 2021 年度教委科技课题(项目编号KJQN202103905)阶段性成果。(文章发表是为了结项,请务必标注基金项目信息)
作者简介 作者姓名:彭靖(1983 年12 月) 性别:女 民族:汉 籍贯:四川攀枝花市 最高学历:硕士 职称:副教授 研究方向:绿色建造技术,
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)