.jpg)
基于大模型的船舶智能监控系统研究

王新
江苏自动化研究所
引言
传统船舶监控系统多依赖人工巡检与单一传感器数据采集,存在监测维度有限、风险识别滞后、决策依赖经验等问题,难以应对恶劣海况、复杂航道、设备故障等多场景下的监控需求。因此,开展基于大模型的船舶智能监控系统研究,不仅是突破传统监控技术瓶颈的关键,更是推动航运业向智能化升级、保障海洋运输安全的重要举措,具有重要的理论与实践意义。
一、基于大模型的船舶智能监控系统研究的必要性
(一)应对复杂航行环境的监控需求
船舶航行过程中面临多样复杂的环境挑战,包括恶劣天气(台风、暴雨、海雾)、复杂航道(狭窄水域、暗礁区域)、海上交通密集区域的船舶交汇等。传统监控系统对这些动态环境的感知多停留在单一数据层面,无法实现多维度信息的融合分析与实时研判。大模型可整合气象、水文、航道、船舶动态等多源数据,通过深度挖掘数据关联关系,精准识别复杂环境下的潜在风险,为船舶航行提供全面的环境监控支持,降低环境因素引发的航行事故概率。
(二)解决传统监控系统的功能局限
传统船舶监控系统存在功能碎片化问题,如设备状态监控、人员活动监测、航行轨迹追踪等功能相互独立,数据无法共享,难以形成全局监控视角。同时,系统对异常事件的识别多依赖预设阈值,对未知或复杂异常场景的适应性差,预警准确性与及时性不足。大模型可打破功能模块壁垒,实现多源数据的统一接入与融合处理,通过自主学习不同场景下的异常特征,提升异常识别的泛化能力,推动监控系统从“被动响应”向“主动预警”转变。
二、传统船舶监控系统的主要局限
(一)数据处理能力不足,多源信息融合困难
传统船舶监控系统采集的数据类型多样,包括传感器生成的设备运行数据(如发动机转速、油压)、导航系统生成的位置与轨迹数据、视频监控生成的图像数据等,但系统缺乏高效的数据处理能力,无法对异构数据进行有效清洗、整合与关联分析。
(二)风险识别滞后,预警准确性较低
传统船舶监控系统对风险的识别多基于预设的固定阈值或简单规则,如当设备运行参数超出设定范围时触发预警。这种方式无法应对动态变化的航行场景与复杂的风险诱因,例如船舶设备的潜在故障可能表现为多参数的细微变化,而非单一参数的突变,传统系统难以捕捉此类隐性风险,导致预警滞后。
(三)缺乏智能决策支持,依赖人工经验
传统船舶监控系统的核心功能集中在“监测”层面,缺乏对监控数据的深度分析与决策支持能力。当系统发现异常或风险时,仅能向监控人员发出警报,具体的应对措施需依赖人工判断,而人工决策受经验、精力等因素影响,可能存在决策延迟或失误的情况。
三、基于大模型的船舶智能监控系统构建与优化路径
(一)不同大模型技术特点与本系统适用性对比
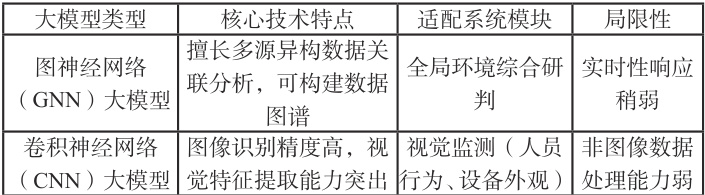
当前主流大模型在技术特点上存在显著差异,其与船舶智能监控系统的适配性需针对性分析。Transformer 架构大模型具备强大的长序列数据处理能力,能高效挖掘船舶航行轨迹、设备运行参数等时序数据中的关联特征,适用于系统中风险趋势预测与动态预警模块,但对硬件算力要求较高,需结合船舶有限的算力资源进行轻量化优化;图神经网络(GNN)大模型擅长处理多源异构数据的关联关系,可将气象、水文、船舶动态等分散数据构建成关联图谱,助力系统实现全局环境的综合研判,不过在实时性响应上稍逊于 Transformer 架构模型;卷积神经网络(CNN)大模型在图像识别领域表现突出,能精准解析船舶视频监控中的人员异常行为、设备外观故障等视觉信息,适合系统中视觉监测模块的搭建,但其对非图像类数据的处理能力较弱。通过表格对比(如表1)可清晰明确各类模型的适配场景,为系统模型选型提供依据。
表1:各类模型的适配场景对比表

(二)系统架构总体设计
基于大模型的船舶智能监控系统架构采用 “感知层 - 传输层 - 处理层 - 应用层” 四层架构设计(如图1),各层协同实现系统功能。感知层作为数据采集入口,整合船舶传感器(发动机、油压传感器等)、导航设备、视频监控摄像头等终端,实时采集设备运行、位置轨迹、视觉图像等多源数据;传输层依托卫星通信、5G maritime 等技术,构建高可靠、低时延的数据传输通道,确保采集数据稳定上传至处理层;处理层是系统核心,搭载前文选型的多类型大模型,先通过数据预处理模块完成数据清洗、格式转换,再由 Transformer 模型、GNN 模型、CNN模型分别对时序数据、关联数据、图像数据进行分析处理,挖掘风险特征与运行规律;应用层面向用户实际需求,开发风险预警、设备监控、智能决策、应急处置等功能模块,以可视化界面向船舶管理人员呈现监控结果,并提供决策建议与操作指引,实现 “数据采集 - 分析处理 -功能应用” 的完整流程。
图1:船舶智能监控系统架构图

(三)应用前景分析
基于大模型的船舶智能监控系统在航运领域拥有广阔应用前景。在商用航运场景中,系统可助力货轮实现航线的动态优化与设备的预测性维护,通过实时监控货物状态与船舶运行参数,降低货物损耗率与设备故障停机时间,提升运营效率;在客运船舶场景下,系统能精准监测乘客活动区域与船员操作规范,及时识别人员拥挤、违规操作等风险,保障乘客出行安全;在特种船舶领域,如科考船、工程船,系统可结合专业作业需求,定制化开发数据监测与分析模块,为科研数据采集、海上工程施工提供精准的监控支持。随着智能船舶、无人船舶技术的进一步发展,该系统还可与船舶自动驾驶系统深度融合,为自主航行提供实时环境感知与风险决策支撑,推动航运业向全流程智能化升级,未来有望成为船舶安全运营与智能化发展的核心基础设施。
结束语
基于大模型的船舶智能监控系统是航运智能化发展的重要组成部分,其通过整合多源数据、强化智能分析、提供决策支持,可有效突破传统监控系统的局限,提升船舶监控的效率与准确性,保障航运安全。当前,系统构建仍需在数据融合、模型适配、安全保障等方面持续优化。
参考文献
[1] 李盛林 . 浅谈船舶智能监控系统 [J]. 珠江水运 ,2025,(12):68-70.
[2] 黄艺坛 . 首批涉客船舶驾驶台智能监控设备安装完成 [J]. 中国海事 ,2025,(05):80.
[3] 张建设 . 船舶工程安全管理中智能监控技术运用 [J]. 船电技术 ,2025,45(02): 60-62+66 .
.jpg)
.jpg)
.jpg)
.jpg)