.jpg)
智能化电梯控制系统的设计与优化研究

王威
湖南省特种设备检验检测研究院 湖南省长沙市 410000
近些年来,全球城市化进程持续加快,高层建筑数量迅猛增长,按照《全球高层建筑报告》显示。单单2023年,全球新增200米以上的建筑就超出300座,电梯属于高层建筑核心的垂直运输工具,它的运行效率和服务品质直接关乎建筑整体效能,传统电梯控制系统大多采取继电器逻辑控制或者简单的可编程逻辑控制器(PLC)控制方法,这样的系统存在调度策略死板,缺少动态适应性等毛病。在大型的商业综合楼或是写字楼,在其上下班时间段(早晚高峰期),传统电梯常常会出现多台电梯同时响应一个楼层的呼叫,造成电梯空驶率 35% 以上,造成能源的浪费,同时也导致乘客在等候电梯的时间上高达30-40秒,给乘客带来极大的不便。传统电梯的诊断与警报能力不足,不能在第一时间对电梯进行安全问题的识别,因此对电梯控制系统智能控制非常有必要。
一、智能化电梯控制系统需求分析
(一)功能需求
智能化电梯控制系统功能需求包含很多方面,在楼层呼叫响应上,要达成精准又迅速的响应机制,乘客在楼层按下呼叫按钮的时候,系统应该能在1秒之内做出响应,然后通过显示模块告诉乘客大概等候时长,智能群控调度功能就要按照即时客流状况,电梯运行情况,比如电梯所在位置,朝向,承载重量等消息,来灵活调配电梯资源,早上高峰期的时候,系统可以率先调度电梯去服务需求量大的楼层,防止资源闲置。故障诊断与预警功能要让系统拥有很强的数据分析能力,它靠传感器来即时收集电梯的运行数据,再用故障诊断算法预先找出潜藏的故障隐患,比如,如果电梯门关闭时出现异常情况,系统就会立刻发出警报,然后实施安全制动,而且,系统还要支持和建筑智能化系统融合,同建筑的楼宇自动化系统(BAS),安防系统等展开数据交流,做到信息互通,共同经营,从而优化整个建筑的智能化水平。
(二)性能需求
就性能而言,高可靠性乃智能化电梯控制系统的基本需求,保证平均无故障时间(MTBF)达至10000小时以上,借此缩减故障造成的停运时长,响应时间须得足够之短,从收到呼叫信号到电梯启动运行的时间不得超过2秒,从而及时服务于乘客,而且要有好的可扩充性能,易于增添新的功能模块或者改善硬件装置,以便应对未来的发展和用户需求的改变,节能性能同样属于关键指标,通过改良调度算法和调控手段,在满足运输需求的情形之下,减小每单运输的能耗程度,实现业内最优秀的节能成果。
二、智能化电梯控制系统设计
(一)硬件系统设计
智能化电梯控制系统硬件架构采用分层分布式设计,由感知层、控制层和执行层组成。
感知层:
1.位置检测:用雷尼绍RGH24系列光栅尺和绝对值编码器组成双冗余定位系统,光栅尺按照莫尔条纹原理,把轿厢位移变成电信号,分辨率达到 0.1μm ,可以精确测出轿厢的微小位移,给平层控制赋予很精确的数据,绝对值编码器采用二进制编码方法,即使断电也能立刻反馈轿厢所在的楼层,保证系统重新开始之后能正确得到位置信息,两者一起用,可以防正因为位置错判引发的平层误差和运行故障。
2.重量监测:选择HBMZ6FD1高精度称重传感器,利用惠斯通电桥原理,当轿厢载重发生变化时,传感器内部应变片发生形变,电桥失去平衡,产生与载重成正比的电压信号,该传感器量程为 0-5000kg ,非线性误差小于 0.02% ,安装时采用四角对称安装,使用专门的信号调理电路进行放大、滤波、线性补偿,使重量数据准确地传送到控制层。
3.状态感知:门状态传感器运用了红外光幕和微动开关双重检测手段,红外光幕是由很多红外发射和接收对管组成,当有东西挡住光线,接收端没信号的时候,立刻就停止关门,再打开门,这样就可以防止夹到人或者物品,而微动开关凭借其内部的机械触点闭合和断开来准确判断电梯门是否完全打开,完全关闭或者完全锁紧,速度传感器采用的是增量式光电编码器,通过对一定时间段内的脉冲数来算出电梯运行的速度,加速度传感器使用的是MEMS技术,可以即时监测加减速过程中的加速度数值变化情况,震动传感器选用的是压电式加速度计,用来检测电梯行驶时产生的震动频率和幅度,好尽早察觉到机械零部件出现松动或者磨损之类的隐患,温湿度传感器与烟雾传感器则专门对轿厢内部的环境参数以及火险隐患进行监测,如果有异常就会马上发出警报。
控制层:
1.ARM主控单元选用基于ARMCortex-A72架构的处理器,主频2.4GHz配备8GBDDR4内存和64GBeMMC存储。该处理器集成丰富外设接口(UART、SPI、IC等),便于与传感器和执行器通信。其多核处理能力和浮点运算单元,可高效运行复杂控制算法和实时Linux操作系统,确保传感器数据实时处理和控制指令快速响应。
2.FPGA协处理单元:采用XilinxKintex-7系列FPGA芯片,具备丰富逻辑资源和高速数据处理能力。负责高速数据采集和实时信号处理,如对位置传感器脉冲信号高速计数和滤波,对速度、加速度数据实时积分和微分运算获取运行状态参数。还可实现自定义逻辑控制,如电梯门开关逻辑、安全回路监测,提升系统实时性和可靠性。
3.通信模块:创建 5G+CAN 总线双链路通信框架,5G通信模块采用支持NSA/SA双模的工业级模组,峰值下行速度达 2Gbps,上行速度150Mbps,电梯同远端的远程监视中心以及云平台执行高速数据互动,做到远距离监测,预估故障,软件远程升级,CAN总线依照ISO11898标准,速率可到达1Mbps,抗干扰性能好,传达稳定,及时性强,担负电梯内部部件之间的通信任务,保证彼此之间协调,还融合WIFI和蓝牙接口,利于现场调整和维修。
执行层:
1.电引电机驱动器:选用iFPP-3000系列变频器,采用PMSM,支持矢量控制和DTC两种控制模式,矢量控制解耦励磁和转矩,精确控制电机转速、转矩,而DTC直接控制电机磁链、转矩,响应快、动态特性好,变频器具有过流、过压、欠压、过热等多种保护功能,保证电机与驱动器的安全,优化PWM算法,减小电磁干扰和噪声。
2.门机控制器:使用伺服电机驱动的智能门机控制器,有自动学习功能,可以根据电梯门的尺寸和重量自动调整开门和关门的速度曲线。开门的时候先是快后慢,关门的时候先是快后慢,避免夹到人或者物。支持光幕和安全触板信号接入,遇到障碍物就停止并且重新开门。通过CAN总线与控制层进行通讯,实时反馈门的状态信息以及接受开关门的指令。
3.照明、通风模块:照明系统采用LED智能调光,根据轿厢的光线强弱以及人员的存在情况来自动调节亮度,白天光线充足的时段降低亮度,夜晚或者光线较暗的时候提升亮度,当没有人员存在的时候就进入节能模式,通风系统使用变频风机,依靠CO2传感器以及空气质量传感器来持续监测空气质量,如果浓度超标就会自行加大通风量,以此来保证空气的新鲜。
4.安全制动装置:由机械制动器和电子制动系统组成,机械制动器是常闭式电磁制动器,正常情况下电磁线圈通电打开,发生故障或者停电时失电,在弹簧力的作用下抱紧制动轮实现紧急制动。电子制动系统通过变频器对电机进行电气制动,减速时将动能转换成电能回馈给电网或者通过制动电阻消耗,提高制动的平稳性及节能效果。还设有超速保护开关、限速器-安全钳联动装置等,以保证电梯能够安全停止。
(二)软件系统设计
软件系统采用了模块化的思想,主要由楼层呼叫处理模块、群控调度算法模块、故障诊断模块和人机交互模块组成。
楼层呼叫处理模块要接受并处理用户的楼层呼叫请求,当用户在楼层或者轿厢里按下楼层呼叫按钮的时候,这个模块首先把呼叫信息归类,分辨是外呼还是内呼,再按照呼叫的时间长短,乘客的数量等情形来决定响应的优先次序,如果遇到急事呼叫,像火灾报警按钮引发的呼叫,那么就会得到最高优先级,从而保证电梯尽快回应。
群控调度算法模块是软件系统的核心,采用基于模糊逻辑与神经网络的群控算法,该算法把电梯的运行状况(位置、方向、载重等)以及乘客的呼叫信息当作输入,通过神经网络对过往的数据展开学习,从而预估将来客流的发展趋向,凭借模糊逻辑依照当下的情形来制订最恰当的调度方案,自动调配电梯资源,改善电梯的运行路线,比如说,预估某个楼层即将涌现大批客流的时候,就预先调度电梯前往该楼层,削减乘客等候的时间。
故障诊断模块实时分析传感器数据,应用故障树分析方法来对电梯运行状况进行检查和分析,首先建立电梯故障树模型,把所有可能发生的故障原因以及故障现象之间的逻辑关系整理出来,然后随时收集传感器数据并与正常工作数据做比较。当识别到不正常的数据之后按照故障树模型去做推断来迅速找出故障产生的原因并且立即发出报警讯号,而且该系统也会视不同的故障情况采用适当的保护措施比如如果发现电梯出现超速现象就会马上激活刹车装置。
人机交互模块是用户与电梯控制系统进行信息交互,除了前面所提到的触摸屏操作界面,还有语音提示系统以及手机APP交互。语音提示系统是在电梯运行时,会通过语音播报的方式告知乘客电梯此时所在的楼层,即将到达的楼层等信息。手机APP则是可以让用户在远方预约电梯,查看电梯当前位置及预计到达时间,方便用户使用。
三、智能化电梯控制系统优化方法
(一)粒子群优化算法在电梯调度中的应用
粒子群优化算法(ParticleSwarmOptimization,PSO)是群体智能的一种优化算法,它模拟了鸟类觅食和鱼类游动的行为。在电梯调度中,把每一部电梯当作一个粒子,粒子的位置表示电梯的调度方案,粒子的速度表示调度方案的调整方向和幅度。粒子群优化算法基本公
式如下:
速度更新公式:
Vij(t+1)=wνij(t)+c1r1j(t)[pij(t)-xij(t)]+c2r2j(t)[pgj(t)-xij(t)].
位置更新公式:
xij(t+1)=xij(t)+νij(t+1)
其中, vij(t) 是粒子i在第t次选代时第j维的速度; xij(t) 是粒子i在第t次选代时第j维的位置; w 是惯性权重,用于平衡全局搜索和局部搜索能力,通常随着迭代次数的增加, w 从较大值逐渐减小,以在搜索初期进行广泛探索,在后期进行精细搜索; c1 和 c2 是学习因子,分别表示粒子向自身历史最优位置和群体历史最优位置学习的程度,一般取值在[0,2]之间;r1j(t)和 r2j(t) 是在[0,1]区间内的随机数;pij(t)是粒子i到第t次选代为止的个体最优位置; pg(t) 是整个粒子群到第t次迭代为止的全局最优位置。
实际应用时,先初始化粒子群的位置与速度,再依照电梯当下状况及乘客呼叫消息,算出每个粒子的适应度数值(一般把乘客平均等候时间,平均乘梯时间,能耗等指标当作适应度函数),通过持续更新粒子的速度和位置,让粒子群慢慢朝着最优解靠拢,进而找出最优的电梯调度方案,削减乘客的平均等候时间和平均乘梯时间。
(二)模糊控制算法在电梯速度调节中的应用
模糊控制算法是一种采用模糊逻辑的智能控制算法,不需要建立精确的数学模型,适用于电梯这种复杂的非线性系统,在电梯速度调节中,电梯当前速度与目标速度的偏差e和偏差变化率ec作为模糊控制器的输入,输出是电机的控制电压u。
将偏差e、把偏差变化率 ec 和控制电压 u 划分成不一样的模糊集,比如NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中),PB(正大),并且给每一个模糊集指定隶属度函数,常见的隶属度函数包含三角形,梯形以及高斯型等等,这里用三角形隶属度函数,拿偏差e的模糊集NB来讲,它的隶属度函数是:
其中,a和b为根据实际情况设定的参数。
根据电梯运行的实际经验,制定模糊控制规则表,例如:当偏差e为NB(负大)且偏差变化率ec为NB(负大)时,控制电压u应取PB(正大),以快速增加电机转速,减小速度偏差。通过模糊推理(常用的推理方法有Mamdani推理和Larsen推理,这里采用Mamdani推理)和清晰化处理(常用的清晰化方法有重心法、最大隶属度法等,这里采用重心法),得到电机的控制电压,实现电梯速度的平滑调节。
四、实验与结果分析
(一)实验设计
为检验智能化电梯控制系统的性能与优化效果,建立电梯模拟实验平台,实验平台包含1:10比例电梯模型、高精度传感器、高性能控制器、驱动装置以及监控系统,实验设置三种典型场景:
早高峰场景:模拟工作日早上7:30-8:30时间段内30层建筑1-20层发生大量上行客流,每层每分钟约有10人次呼叫电梯;
平峰场景:模拟工作日上午9:00-11:00时段内,楼层呼叫随机分布,每层每分钟平均3人次呼叫电梯
晚高峰场景:模拟工作日下午5:30-6:30时,30层建筑15-30层有大量下行客流,每层每分钟平均有8人呼梯。
分别对传统电梯控制系统、基于标准粒子群优化算法的电梯控制系统以及本设计的智能化电梯控制系统进行测试,记录每个场景下的乘客平均等待时间、乘客平均乘梯时间和电梯能耗等数据,实验过程中每个场景重复测试10次,取平均值作为实验结果,确保实验数据的准确性和可靠性。
(二)实验结果
实验结果如表1所示,平均等待时间对比见图2,平均乘梯时间对比见图3,能耗对比见图4。
表2不同场景下各系统性能指标对比
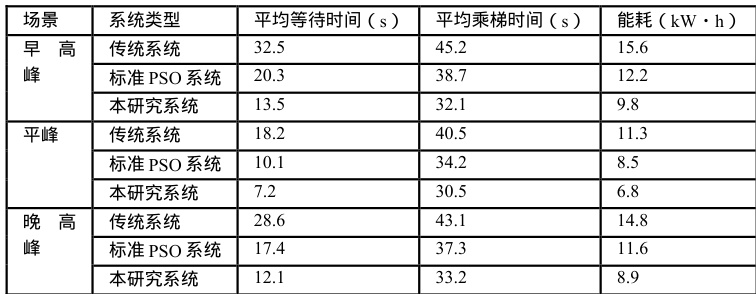
图1早高峰场景平均等待时间对比图
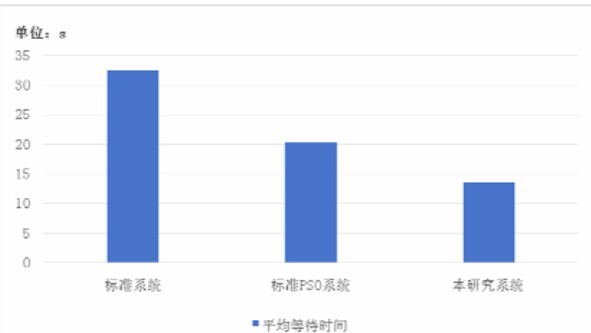
图2平峰场景平均乘梯时间对比图
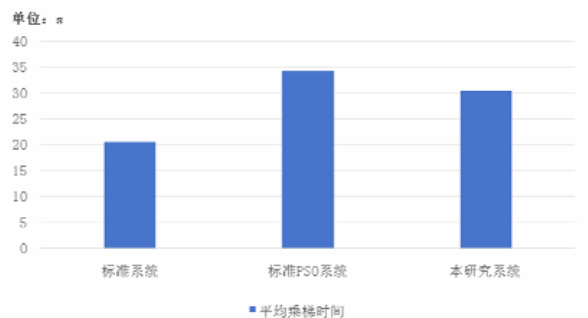
图3晚高峰场景能耗对比图
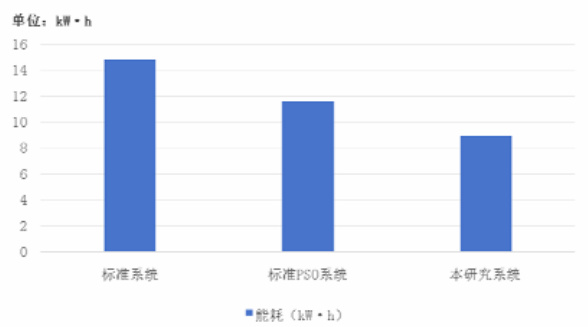
从实验结果中可见,不管是三种场景中本研究所提出
.jpg)
.jpg)
.jpg)
.jpg)