.jpg)
三维城市测量技术在测绘工程中的应用

边庆友
宿州市自然资源勘测规划设计院 安徽 234000
0 引言
随着城市化进程的加速,传统的二维测绘技术已逐渐显现出其局限性,难以满足现代城市规划、设计、建设及管理的精细化需求。在此背景下,三维城市测量技术应运而生,以其高精度、高效率及高可视化的技术特色,为测绘工程提供了强有力的支撑。该技术能够精确捕捉城市的三维信息,快速处理并实现数据的可视化,为城市规划决策提供了科学依据 [1]。此外,三维测量技术的应用领域广泛,不仅限于城市规划,还涵盖了建筑、施工、环保等多个行业,展现了其多功能优势。因此,三维城市测量技术的应用,不仅是对传统测绘技术的一次重要升级,更是推动城市可持续发展的重要工具。
1. 项目概况
某工程位于城市中心地段,其结构多样且复杂,加之交通繁忙、照明条件不足以及视线受阻等特点,给传统测绘方法带来了极大挑战。为确保测绘任务的高效与精确完成,项目团队在前期开展了三维激光扫描技术的预实验,选取了两个人防工程作为实验对象。此次实验的核心意图在于验证三维测量技术在地下复杂环境中的适用性与可靠性,为后续全面展开的人防工程测绘工作奠定坚实基础。
2 试验流程
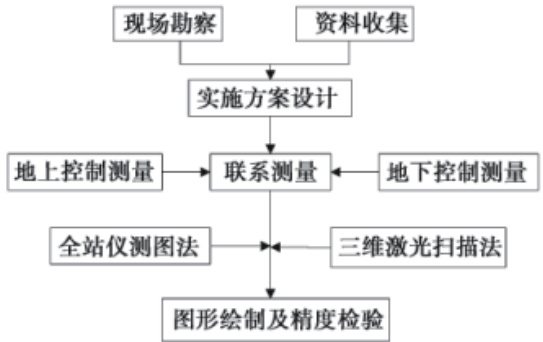
本次实验的测量任务涵盖地面控制测量、联系测量、地下控制测量、地下空间要素全站仪测量以及三维激光扫描测量。其中,全站仪测量主要用于与三维激光扫描数据进行对比分析,具体实验流程如图1 所示。
图1 实验流程图
3 三维激光扫描仪在城市地下空间测量中应用的方法
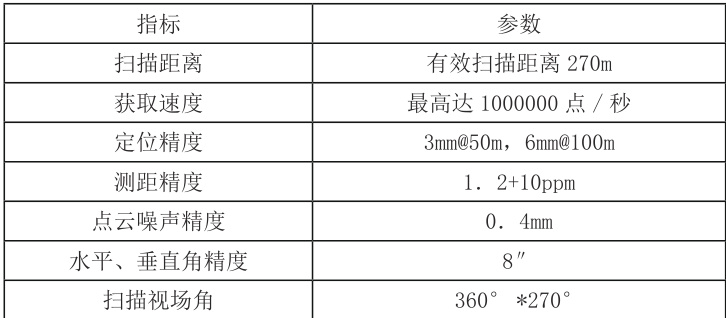
在城市地下空间测量中,三维激光扫描技术的应用方法充分展现了其高效性与精准性。本次测绘采用徕卡 ScanStationP40 扫描仪作为核心设备,该设备在技术上进行了显著升级,引入了混合像元与 HDR 系统,能够有效应对复杂环境下的光线不足与细节模糊问题,从而大幅提升数据采集的精确度。在数据处理环节,项目团队选用 Cyclone 软件,该软件以其操作简便、处理精度高的特点,确保了扫描数据的快速处理与高质量输出。通过这一系列技术手段的结合,三维激光扫描仪能够高效捕捉地下空间的复杂结构信息,为后续的分析与建模提供可靠基础。具体性能指标详见表 1,进一步印证了该技术在城市地下空间测量中的优越性与实用性。
整平,同时放置徕卡 4.5 寸标靶,并设定 6.3mm@10m 的扫描密度进行全景扫描,以捕捉高分辨率的空间信息。对控制点上的标靶进行独立扫描,并详细记录控制点名称,确保数据的可追溯性 [2]。在测区内,扫描仪沿预设线路每隔 30—50m 均匀设站,以保证数据的连续性与点位精度。此外,通过公共标靶进行站间点云数据的拼接,每站扫描前后均对标靶进行扫描,确保至少有两个公共标靶连接相邻站数据,从而实现数据的无缝整合。
3.2 点云的拼接及坐标配准
本项目采用徕卡P40 扫描仪与Cyclone 软件相结合的技术方案,实现了标靶的自动拼接,不仅大幅提高了拼接效率,还确保了拼接精度,其误差小于 1mm,平均仅为 0.7mm。每次拼接完成后,系统会自动生成拼接报告,详细记录拼接精度信息,为后续的数据分析提供可靠依据。在坐标校准环节,基于 3 个控制点,将点云数据精确校准至控制点坐标系,确保数据的地理位置准确性。完成拼接与校准后,获取了大量具有真实地理坐标的点云数据。为进一步优化数据质量,利用Cyclone 软件进行批量去噪处理,清除冗余数据,保留有效的点云信息。
3.3 二维线划图的快速提取
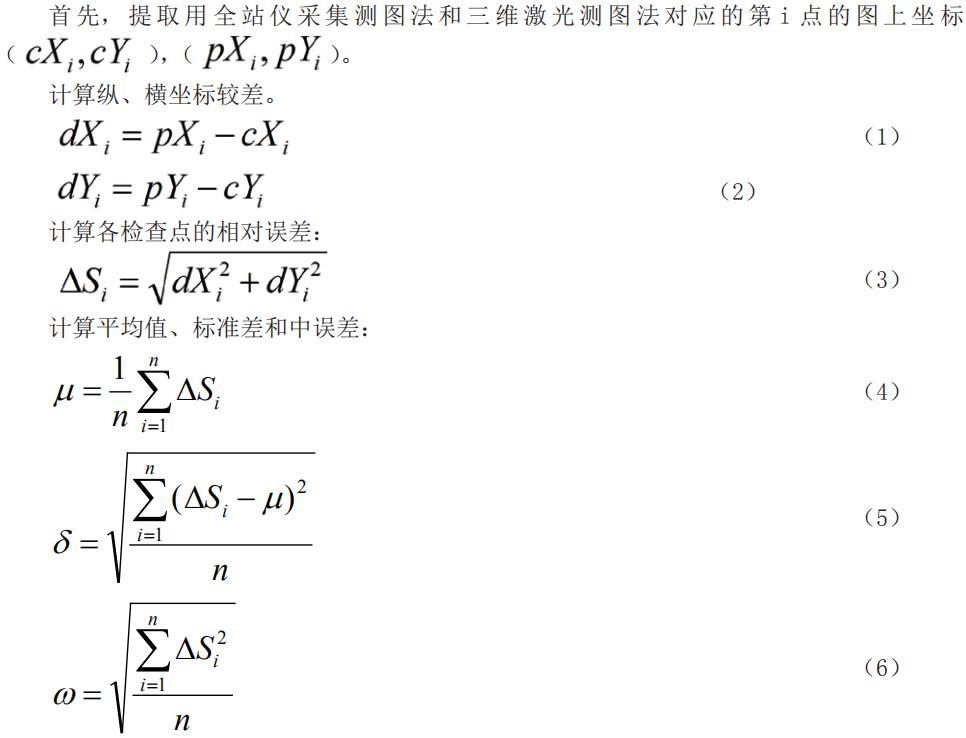
在三维激光扫描测量中,二维线划图的快速提取是高效利用点云数据的重要环节。本项目采用 Cyclone 软件,在地面 2m 高度创建 X-Y 平行切片,这一方法能够精准截取建筑物及设施的横截面信息,为后续的二维绘图提供基础数据。通过 Cloud Worx 插件,将生成的切片导入 CAD 软件中,快速描绘出建筑及设施的轮廓线,显著提高了绘图效率,同时确保了图形的准确性 [3]。在精度评估环节,采用坐标对比法对三维激光扫描仪的测量结果进行评定,进一步验证了数据的精确性。
3.3.1 精度评定方法
表1 P40 扫描仪性能指标
精度评定是确保测绘成果可靠性的核心环节。本项目采用传统的测图成果检查方法,通过对抽样点的坐标进行检测,并与原始坐标构成不等精度观测,以此评估测量数据的准确性。基于不等精度观测值之间的差异,计算点位中误差,从而量化测量结果的精度水平。为优化地下空间的测量精度,项目团队在测区内引入了 5 个控制点,并采用推导线方法进行布局设计,确保控制点的分布合理且有效。在数据采集与提取阶段,利用全站仪精准采集地物的平面坐标,同时提取测图法对应的图上坐标数据,为后续的精度评定提供全面且一致的数据基础 [4]。
3.1 三维激光扫描方法
在扫描前,首先利用全站仪进行地上与地下的控制测量,并将控制点精确引入人防工程入口,为后续的点云数据配准提供基准。扫描过程中,使用三脚架和基座对扫描仪进行对中
3.3.2 评定结果分析
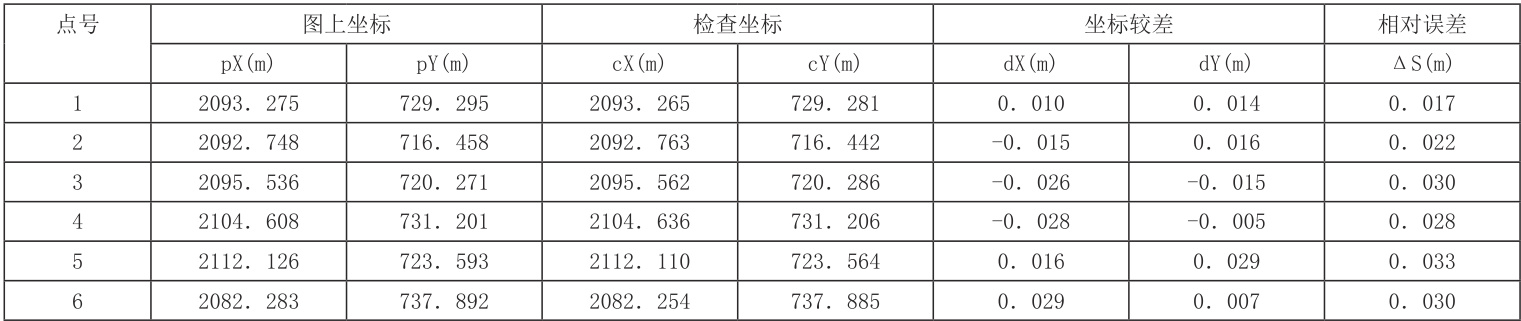
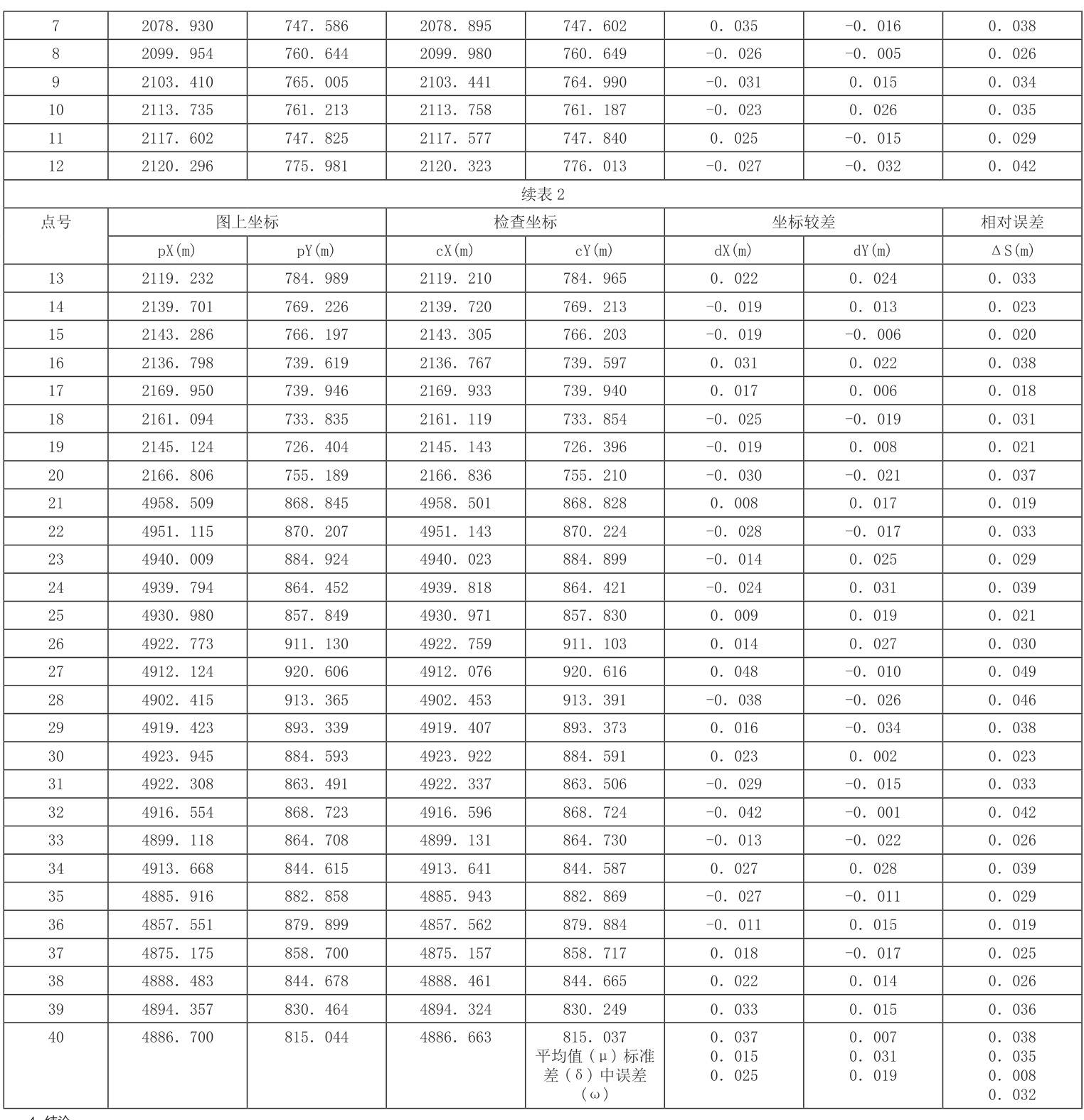
表 2 给出了全站仪测图和三维激光扫描仪测图之间平面坐标的检测结果。测结果的平均值 μ 为 0.035,表明测量数据的整体偏差较小,符合高精度测绘的要求,进一步验证了三维激光扫描技术在数据采集中的准确性。三维激光扫描仪的测图误差表现尤为稳定,其标准差 δ 仅为 0.008m ,显著低于传统测量方法的误差水平,充分体现了该技术在数据一致性和可靠性方面的优势 [5]。平面点位中误差 ω 的计算结果为 0.032m ,进一步证实了测量点位的高精度特性,为城市规划和建设提供了可靠的数据支持。此外,52.5% 的检测点位于一倍中误差范围内,且所有检测点均未超出两倍中误差范围,完全满足城市测量规范的精度要求。结果表明,三维激光扫描技术不仅能够提供高精度的测量数据,还在误差控制方面表现出色,确保了测绘成果的可靠性与实用性。综合来看,三维激光扫描技术在城市测量中的应用,充分展现了其在现代测绘工程中的重要作用和广阔前景。
表2 平面坐标对比表
4. 结论
综上所述,三维城市测量技术在测绘工程中的应用前景广阔,其高精度测量与高效数据处理能力,为城市规划、建设及管理提供了强有力的技术支撑。通过精确捕捉城市空间信息并实现数据的可视化,该技术不仅提升了测绘工程的效率与质量,还为城市可持续发展奠定了坚实基础。随着技术的不断进步与创新,设备成本有望逐步降低,三维城市测量技术在未来将发挥更加显著的作用。
参考文献:
[1] 黎 树 禧, 喻 永 平. 广 州 市 城 市 地 下 空 间 测 量 技 术 研 究 [J]. 测 绘 通 报,2011(9):45 - 47
[2] 刘海飞,杨敏华,车建仁.地下空间中测绘技术的探讨 [J].测绘与空间地理信息,2013,36(12):16 - 18,21
[3] 韩文泉,胡伍生,陈昕,等.地下空间激光扫描点云精度对比分析 [J].测绘通报,2017(12):72 - 76
[4] 余乐文,战凯,张达.地下空间三维激光扫描等分辨率方法研究[J].仪器仪表学报,2018,39(1):68 - 74
[5] 王孟和,储征伟,郑勇,等.基于3DSLAM 移动扫描技术的地下空间测量方法研究[J].城市勘测,2017(3):119 - 123
作者简介:边庆友,男(1980),汉族,安徽省萧县人,本科,目前职称:测绘工程师,研究方向:测绘(大地测量、工程测量、界线测绘、摄影测量与遥感等)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)