.jpg)
“天巡者”

寇明洁 刘欣月 盛欣欣 吴天籁 刘少杰
天津职业技术师范大学 3003350
引言
伴随城市化进程的加速和机动车保有量猛涨,城市交通拥挤、交通事故多发等问题日渐明显,道路基础设备的老化、破损,诸如极端天气和警力有限这类问题,也对交通系统的运转存在潜在威胁,社会对智能交通管理以及道路检测[1] 的需求持续增多。
低空智能交通管理 [2] 以及道路检测机器人作为新兴技术方式,拥有灵活程度高、覆盖范围宽泛、成本少等长处,能有效弥补传统做法的缺漏,作为一款高性能嵌入式的处理器,这就是 STM32H745 微控制器,具有强劲的运算实力、多样的外设接口以及低能耗等特点,其为机器人开发搭建了一个理想的硬件平台。
1 系统总体设计
1.1 项目研究目标
本项目打算研发一款城市低空智能交通治理与道路检测方面的无人机,集中攻克路面识别、检测以及交通信息处理的两大技术困境,主要研究内容囊括了:研发超声波雷达全向立体防碰撞模块,将 K230 视觉模块与红外传感进行融合 [3],实现复杂环境里障碍物的识别;构建起异构计算的架构,依靠 STM32H745 双核开展分工,保证 1km 及以下作业半径里能进行60fps 实时图传;响应速度实现近似实时同传。
1.2 总体结构设计
“天巡者”机器人主要由飞行平台、传感器模块、控制中心模块、通信模块和电源模块构成,飞行平台采用四旋翼无人机式的结构,具备出色的机动性与稳定性,可实现低空处的悬停与巡航,传感器模块由摄像头、激光雷达、GPS 模块、惯性测量单元(IMU)等组成,用来采集交通数据和道路状况的各类信息。控制模块把 STM32H745 微控制器当作核心,承担传感器数据处理、机器人飞行控制和任务调度工作,通信模块借助无线通信技术,达成机器人跟地面控制中心之间的数据传输和指令交互 [4],电源模块为机器人的各部件输送稳定的电力。
1.3 核心控制模块
图 1.1 ARM Cortex-M7 结构图
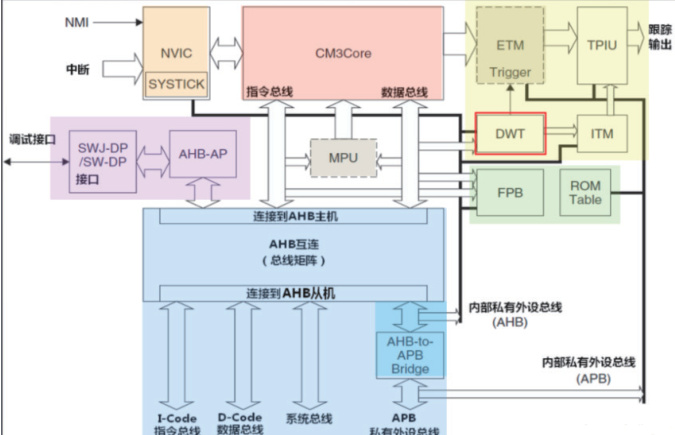
核心控制模块采用 STM32H745 微控制器,该微控制器基于 ARM Cortex-M7 [5] 内核如图1.1,此款微控制器主频达 480MHz,运算以及数据处理能力都相当出色,STM32H745 微控制器配置了多样的外设接口,诸如GPIO、UART、SPI、I2C、ADC 和DAC 这类,功能十分强悍,可满足机器人跟多种传感器、执行器之间的连接条件,该微控制器也支持多种通信协议以及存储方式,让数据的传输和存储变得便利。
1.4 感知模块
视觉传感器:配置高清摄像头跟红外相机,用来采集交通流图像。
定位模块:开展GPS 与IMU(惯性测量单元)的集成事宜,做到厘米级定位及姿态感知,保障飞行路径达到高精度。
环境传感器:含有温湿度传感器、粉尘传感器,辅助估算道路周边的环境情形。
1.5 执行模块
飞行平台:四旋翼无人机结构组成,搭载着无刷电机跟电子调速器,由 STM32H745 凭借PWM 信号控制飞行姿态。
地面联动组件:可实现搭载小型机械臂,可进行道路标记(如临时警示标识放置)。
1.6 通信模块
通信模块 [6] 选用4G/5G 无线通信模块,达成机器人跟地面控制中心之间的远距离数据递送,4G/5G 通信存在传输速率快、覆盖范围广、稳定性高等优点,可实现实时数据传输的需求,通信模块同样支持了北斗定位功能,增强了机器人定位的精准度与可靠性。
2 关键技术实现
2.1 交通管理算法
基于 STM32H745 体现出的硬件加速能力,采用轻量化目标检测算法,实现车辆计数、车牌识别以及违章举动(如闯红灯、逆行)的实时识别,采用动态帧率的调整,兼顾检测精度和系统功耗。
2.2 道路检测算法
面对道路图像,采用边缘检测跟特征提取算法,察觉裂缝、坑洼等路面的病害,STM32H745 利用 DMA(直接存储器访问)技术迅速读取图像数据,依靠 OpenCV 库完成图像的处理,检测准确率为 90% 以上。
2.3 飞行控制策略
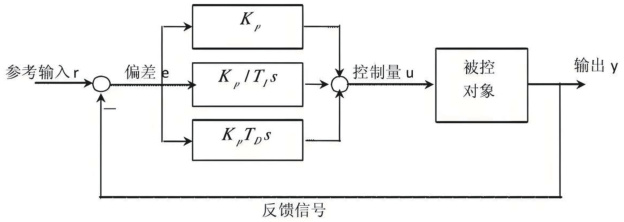
如图 2.1 所示的基于 PID 控制算法,STM32H745 实时开展 IMU 与 GPS 数据的处理,实时变动电机转速,实现恒定高度飞行、自动避障及路径规划,采用卡尔曼滤波将GPS 和IMU数据相融合,把定位误差缩减至 ±5cm⨀ 。
图 2.1 实现PID 控制的控制系统结构
3 实验与结果分析
3,1 实验环境与 setup
实验采用城市交通流量适中、道路状况有代表性的典型路段开展测试,设备含有“天巡者”机器人、地面控制中心以及数据采集设备,实验前把机器人传感器校准、飞行系统调试及地面软件部署完成,保障各部件实现正常运行。
3.2 实验内容与步骤
交通数据采集实验:机器人依据预设路径实施低空巡航,采集道路上的交通流量、车辆速度、车牌信息等数据,同步记录飞行路径及采集结果。
道路状况检测实验:凭借激光雷达和摄像头采集路面三维点云以及图像数据,检查平整度偏差、裂缝等病害,同时记录相关参数。
通信性能测试实验:对不同距离(无遮挡、部分遮挡场景)进行通信距离、传输速率、成功率及延迟时间的测试。
飞行性能测试实验:在不同的高度及速度情形下,评估飞行稳定性、灵动性及续航能力,记录飞行经历的时间与电池电量的消耗情形。
3.3 实验结果分析
交通数据采集:交通流量采集可靠,车辆速度测量误差控制在 ±5% 及以内,车牌识别的精准率≥ 90% ,可有效识别闯红灯、超速等违规动作。
道路状况检测:成功识别道路平整度偏差及裂缝位置,裂缝深度测量误差最大为±2mm ,检测结果跟人工检测大体相同。
通信性能:无遮挡环境下通信距离达到 ⩾2km ,传输成功率达到 99% 及以上,延迟⩽100 毫秒;处于遮挡环境时,通信仍可维持稳定。
飞行性能:飞行稳定性佳,可以精准跟踪事先预设的路径,标准条件。
4 结论与展望
基于 STM32H745 呈现出的高性能处理能力,达成了低空交通管理跟道路检测的综合功能,实验说明其在检测精度以及效率上胜过传统方案,针对未来的研究方向,我们可从下面几个方面着手:优化现有的电源管理系统,采用更高能量密度的电池,或者采用新型能源技术,增强机器人的续航时长;二是对传感器融合算法做进一步改进,促进复杂环境下传感器数据采集的精度和可靠水平;三是探索更高效的图像处理与数据分析算法,结合人工智能跟机器学习技术,提高机器人的智能水平以及实时反应本领,还能扩大机器人的应用范畴,诸如在应急救援、环境监测等方面的应用实践,进一步挖掘低空智能机器人的优势。
参考文献:
[1] 张鹏 . 道路检测系统中的图像处理技术研究与实践 [J]. 汽车周刊 ,2025,(05):221-222.
[2] 陈柳钦 . 低空经济未来发展潜力预测 [J]. 产权导刊 ,2025,(03):10-14.
[3] 关志艳 . 基于 STM32 的图书馆占座监测装置的设计 [J]. 山西电子技术 ,2022,(06):35-37.
[4] 林鹏翔 . 基于多传感器无线网络的老年人健康监测系统研究 [D]. 浙江大学 ,2021.DOI:10.27461/d.cnki.gzjdx.2021.004204.
[5] 郑贵林 , 康亮 . 基于 ARM Cortex-M7 内核的配电自动化终端设计 [J]. 仪表技术与传感器 ,2020,(11):28-32.
[6] 王嘉宁 , 孔耀 , 周旭 , 等 . 基于 HC-12 无线通信模块的便携式湿地监测装置设计 [J].现代农业科技 ,2025,(13):168-170+175.
资助项目:2025 年市级大学生创新创业训练计划(项目编码:202510066072)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)