.jpg)
无人自动化天车在某钢厂水渣智能抓渣转运改造项目上的应用

李学文
湘潭钢铁集团有限公司炼铁厂 湖南湘潭 411101
某钢厂 1 号高炉新装的水渣处理系统包含 1#、2# 两个底滤池,日常生产中,该系统每日需处理的抓渣量高达约 2300 吨,工作量相当繁重。以往,高炉出渣后,职工们需要在高温高湿的环璄下,坐在行车操作室内进行抓渣作业。然而,由于现场水蒸气弥漫,作业人员的视线常常受到阻碍,难以精准控制天车的速度和位置,导致天车摇摆、钢丝绳扭曲等问题时有发生。此外,不同操作人员的个体差异也会影响操作的准确性,进而可能影响高炉生产的顺畅进行。智能抓斗天车通过开发相应的硬件和软件系统,实现全作业流程下的无人化运行,自动化和信息化程度高,运行平稳性、抓斗同步性、作业效率、满斗率等关键指标均优于人工操作,可完全替代人工作业。
一、项目改造概述
1、项目改造总体要求:
对 1# 高炉底滤池 1# 天车进行无人化改造,增设相关的地面设施及安全交互的辅助设施,建设一套中控系统,在控制调度管理系统指挥下,实现渣料捞取、
平堆、移堆、装车外发等作业的自动化
2、项目系统架构
1# 高炉底滤池抓渣天车智能化升级改造项目控制系统的整体架构图如下图所示,改造后的智能天车受WMS 的指挥及调度。
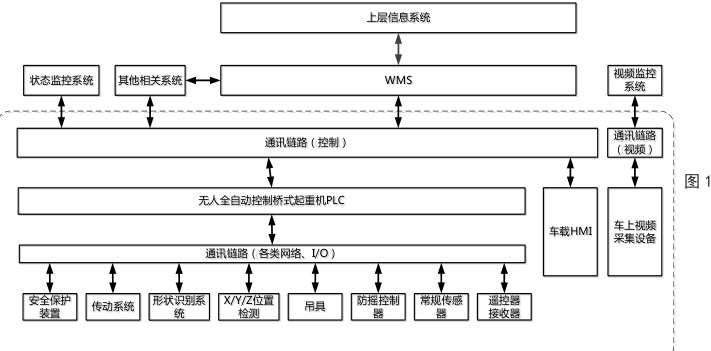
1# 高炉底滤池系统架构图
根据库区及天车的情况,天车具备司机室驾驶模式、遥控模式、自动模式三种模式。优先级从高到低依次为司机室驾驶模式、遥控模式、自动模式。
3、改造方案实施步骤如下:(1)完成大车、小车、起升、开闭 5 台电机的拆除、安装和动力电缆及控制电缆敷设工作。(2)完成机上电气室 PLC 控制系统的全部接线、程序加载和单机调试。(3)完成司机室手动功能调试,中控室远程自动化调试、智能化交付。
二、智能抓渣行车系统功能描述及应用
1# 高炉底滤池抓渣天车无人化是基于天车 PLC( 可编程控制器 )、VSD( 变频器 ) 和传感器的控制系统以及机器识别、计算机、通讯等信息技术,并开发相应的智能调度与控制算法,实现抓渣天车无人操作模式下的自动化运行。为实现上述功能目标,智能抓斗天车系统需要配备多个功能技术模块,主要包含:无人天车电控系统、天车定位系统、有线无线系统、视频监控系统、地面系统、中控系统等。
1、天车电控系统
智能抓斗天车电控系统主要由车载 PLC 系统及各机构驱动变频器等组成。车载 PLC 采用西门子 S7-1500 系列。电机驱动采用西门子 G120 系列高性能变频器控制,速度精度及力矩精度较高,适合天车电机控制。
图 2 PLC 控制原理图
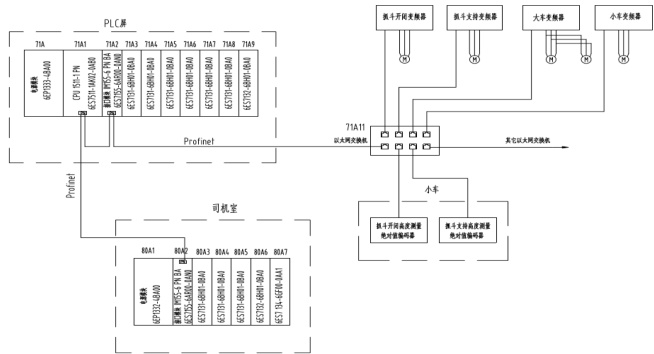
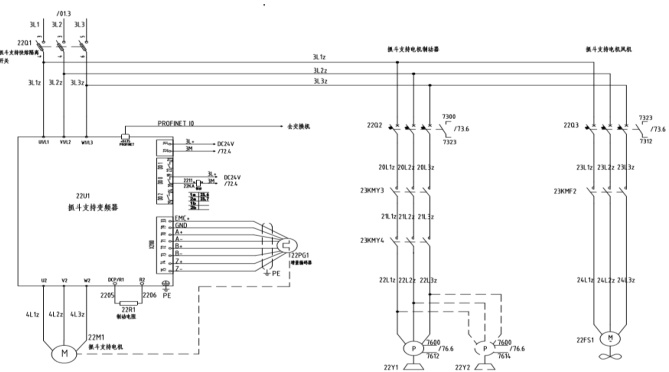
图3 抓斗电气控制原理图(部分)
2、自动定位系统
天车自动定位实现利用三维位置检测系统能实时检测天车的三维位置,通过地面中控系统向天车发送目标位置。车载 PLC 接受到该位置后,控制各机构变频器驱动各机构电机向目标位置运行,通过一定优化算法,当天车停止时,刚好达到目标位置,有效提高定位效率。大、小车定位系统采用编码电缆对大小车位置进行检测。起升机构(Z 方向)及抓斗开闭位置检测采用绝对值编码器,抓斗上方配置的称重传感装置能够判断物料抓取情况,同时辅助进行抓斗触底判断。其集成的PROFINET 接口可以实现与 S7-1500PLC 的完美融合和数据传输。其多圈高分辨率的计数特点,完全能够满足客户高精度定位的要求,特别是高强度的防护等级,具有强抗冲击和抗震动能力,适用于恶劣的工业环境。
3、电子防摇
利用软测量技术估计吊钩偏摆角,采用状态反馈的方法对天车运行机构进行速度控制同时抑制吊钩摆角,大车在行驶过程中的运动基本分为加速、匀速、减速和停车四个阶段。其防摇步骤归纳如下:(1)计算目标位的距离;(2)根据距离和防摇摆策略,计算天车速度模型;(3)根据天车速度模型,计算加速和减速控制策略;(4)根据控制策略,计算不同走行阶段的具体参数;(5)实时控制输入,循环迭代计算。
4、地面及安全系统
由于智能抓斗天车处于无人驾驶状态,自动化程度高,地面运输车辆等地面设备必然需要与无人天车系统产生信息交互,实现联动控制。因此,也涉及到对该部分设备需要进行一定程度的改造。地面设备与无人天车系统的信息对接功能;包括:停车到位、任务触发、任务修正、作业结果反馈等。安全受控功能。包括作业与停靠规则、报警与响应规则等。部署就地电控系统,司机可通过就地电控系统按钮输入“装车请求、紧急停止、补充装料、装车完成”等信号,系统也可向车辆(司机)发出“车辆姿态错误、渣池欠料、系统启动请离开”等语音提示、声光报警、指示灯点亮及语音告警等信号。装车请求处部署网络电话机,便于司机和控制中心人员沟通。
5、网络通信系统
本项目网络通信系统包括有线和无线两大部分。其中有线数据通信主要负责地面与中控系统进行数据交换,无线数据通讯主要负责天车现场的无线覆盖。本网络通信系统采用的工业无线局域网具备 5G 网络接口功能,后期可与运营商实现技术对接,5G 网络部署后,可实现中控室远距离。本项目网络通讯系统在带宽容量、时延、抖动、可靠性等方面具备卓越性能。所配置的以太网交换机采用 8 口、千兆工业级网络交换机,专为工业严苛环境设计的通讯交换设备,集成路由、交换及 VPN功能于一体,具备强大的应用扩展能力。
6、视频监控系统
为使得在中控机房能够看到现场实时情况,方便相关人员对底滤池抓渣及装车等作业进行人工干预和指挥,同时提升现场安全监控管理水平,需要在天车及现场相应位置安装部署网络摄像头。对天车运行的大车方向、小车方向、钢丝绳、吊运作业等进行进行实时的监控,视频信号通过无线通道传到地面后,再传回中控室。远程操控台安装 NVR 设备及显示屏,可对自动天车的视频进行实时监控。在渣池区域部署摄像头时,还应按照库区的需求,提供相关补光灯设备,以保证夜间操作的需要。按照安全需求,视频监控系统可在指定的位置,提供安全侦测摄像应用方案,对现场人员意外闯入进行实时的识别和告警且并入地面PLC 控制系统进行安全响应。
三、结语
本项目改造完成后,抓渣天车的自动化控制水平得到了进一步提升,其使用寿命也得到了有效延长。同时,抓斗及渣池底部的维修次数和钢丝绳的更换次数也显著减少,这极大地改善了岗位职工的工作环境,同时也确保了设备的可靠性,提升了本质安全水平。智能制造对于传统行业的转型升级、实现高质量发展具有重要意义。未来,炼铁厂将继续吸收和借鉴行业先进的智能化改造和数字化转型经验,致力于推动“数智炼铁”向更高端、更智能、更绿色的方向发展。
参考文献:
[1] 蒲龙映 , 彭青松 , 李乐军 . 含钛高炉渣综合利用研究现状与展望 [J]. 环境生态学 ,2022,4(Z1):106-110.
2] 李海东 . 桥式起重机控制系统中 PLC 和变频器的应用 [J]. 科技风 ,2017,(11):167-167.
[3] 张军 . 物联网背景下起重机检验技术应用分析 [J]. 中国设备工程 ,2020,(3):184-186.
[4] 李阳,杜欣,徐晓飞 . 电子智能控制技术在起重机上的应用 [J]. 电子技术与软件工程 ,2019,(11):78-78.
[5] 孙来庆 . 一种全自动无人装卸料起重机的基本配置 [J]. 机械工程与自动化 ,2021,(3):114-116.
作者简介:李学文,1978 年10 月生,男,汉族,人,中级,主要从事电气自动化相关工作。
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)