.jpg)
基于XYT-100 型一体化观测站的外观自动监测系统在水电站大坝安全监测中的应用

朱道雄 张志鹏
华电金沙江上游水电开发有限公司苏洼龙分公司 四川甘孜 627650,国电南京自动化股份有限公司 江苏南京 210000
一、项目概况
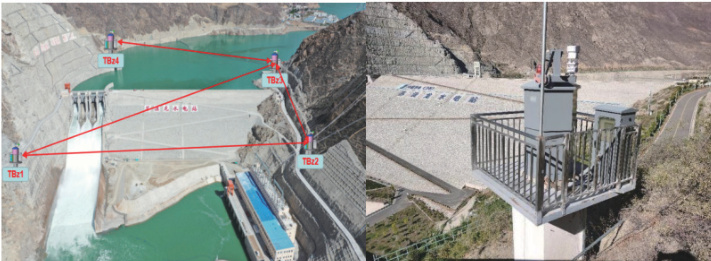
苏洼龙水电站位于西藏自治区芒康县与四川省巴塘县交界的金沙江上游干流上,电站为沥青混凝土心墙堆石坝,大坝坝顶高程 2480 米,最大坝高 112 米,装机容量 120 万千瓦,主要枢纽建筑物由拦河坝、左岸引水系统及地面厂房、右岸溢洪道及泄洪放空洞等建筑物组成。
电站人工外观测点多处于枢纽区左岸、右岸、坝前、坝后,测点较集中。建立了一套由四台测量机器人组成的外观自动监测系统,对枢纽区外观监测点实施自动监测,替代目前人工的监测模式,监测数据实时传输,监测软件自动处理并分析。在现有成熟的技术和方案基础上,进行部分实用性创新,监测成果支持集成至第三方安全监测信息管理平台,并具有扩展性、兼容性、可靠性和先进性。
二、外观自动监测系统组建
2.1 监测系统设计
外观自动监测系统采用一体化智能测站,通过超高精度全站仪进行自动化测量,智能环境量传感器自动测量环境量(降雨、温度、湿度、风速、能见度等),通过监测软件控制,按照设定时间段自动判别测量条件,使用设定的方法自动照准表面位移监测点反射棱镜,获取距离和角度值,通过特定算法进行自动计算,得到表面位移监测点的空间三维坐标,并对观测环境量进行改正[1][2]。测站配置了AL 视频摄像头、现场语音警报警示装置用于设备安防。整个测量机器人监测具备了自主决策、智能监测的特点、实现了真正意义上的无人值守。
在本项目中,测站拟建位置狭窄,枢纽区监测范围广,不适合修建砖混结构观测房,星图测 XYT-100 型一体化观测站使用占地面积小,可起降的保护罩为贵重仪器设备提供了安全可靠的防护;一体集成气象传感器、伺服系统、远程控制终端等,自动化智能化程度高;系统采用开放的数据接口,解算后能实现自动筛除粗差,成果可自动导入大坝全监测自动化管理系统。
在左、右岸及上、下游各布置一套一体化智能测站系统,在枢纽区人工测点固定永久棱镜,由软件控制测量机器人自动进行观测采集原始观测数据[3]
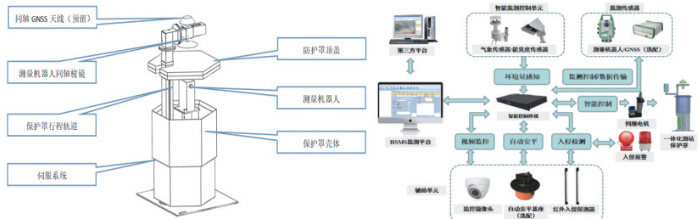
图2-1 XYT-100 型一体化观测站组成拓扑及扩展图
2.2 观测方法
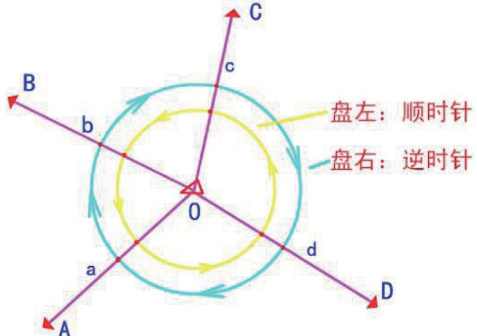
2.2.1 极坐标全圆观测法
全圆观测法是从初始方向(零方向)开始,依次进行水平方向观测,正镜半测回和倒镜半测回,照准各方向目标并读数的方法。该方法对比极坐标法,每次观测都回到初始方向(零方向)观测,在数据处理时增加了归零差的分配,同等观测条件下精度更高。
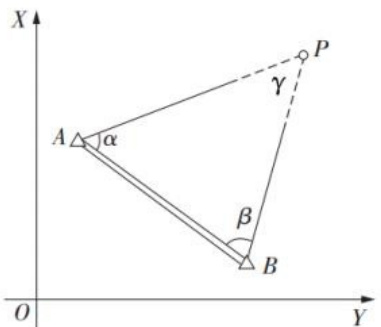
2.2.2 前方交会法
前方交会法 [4] 是分别在已知点 A 和 B 架站,观测待测 P 点,根据计算条件的不同,又可分为角度前方交会和距离前方交会。
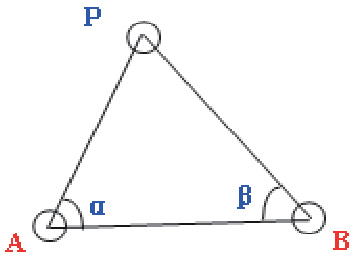
该方法,边长对监测精度的影响较小,但对网形的要求较高,且相比极坐标法和全圆观测法,检核条件更多,是目前外部变形监测中常用的一种观测方法。
综上所述:结合测站的分布位置,重点部位优先使用前方交会法进行监测,并尽可能多的将其他部位测点纳入前方交会法进行监测,不具备前方交会的测点使用极坐标全圆观测法进行监测。
2.3 梯度气象改正
测量机器人自动化监测基于光电测距原理,受大气密度、折光影响较大,因此高精度的监测需要改正的不仅仅是测站的气象要素,而应对测线进行气象改正[5],因此,本项目中除在 TBz1\~4 测站采集气象数据,增设了 4 套气象站采集测区的气象数据,以此建立更准确的气象改正模型。

三、监测精度评定
假定 2024 年 11 月 1 日至 2024 年 11 月 10 日大坝及边坡无变形发生,利用该时间段的监测数据计算中误差,其公式为:

式中 n 为观测次数,  为观测值的算术平均值。
为观测值的算术平均值。
观测次数,为观测值的算术平均值。
3.1 极坐标法精度计算
测站坐标为( xA yA hA ),监测点坐标为( ⟨xB yB hB )另外,水平测角中误差为 σβ(Ω"Δ) ),竖直测角中误差为为 σα ("),测边中误差为 σs (mm),并假设他们相互独立。
监测点坐标(极坐标测量方式)按下式计算
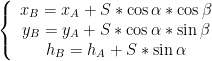
式中,测站坐标视为精度已知值。对上式全微分,可得

和
dhB=sinα0*dS+S0cosα0*dα
根据误差传播定律,由式(2)得

进一步的,点位平面精度为

若认为水平角与竖直角测量精度相同,即 σβ=σα ,则式(5)简化为:

同理,由式(3)可得垂直方向精度为

(7)
而三维点位精度则为:

其中:
α —竖直测角,β—水平测角, (0) ;
S—测距边边长(斜距),m ;
ρ—常数, ρ=206265′ '。
本项目使用的仪器为徕卡 TM60 全站仪,其标称精度为:测角精度 0.5" ,测距精度为0.6+1ppm。然后利用自动化监测数据根据公式(6)、(7)计算极坐标法监测点的平面精度和垂直精度。

3.2 前方交会法精度计算采用前方交会法进行数据采集,其点位中误差计算公式为:

(9)式中:Mp—测站点的点位中误差,mm ;mβ—水平角观测中误差, Ξ(Λ"Λ) ;S —已知边长,由已知点 A 、B 坐标反算而来,m ;α,β—水平观测角, (∘) ;ρ—常数, ρ=206265′, ;γ—交会角,由未知点至两相邻已知点方向间的夹角,(°)。
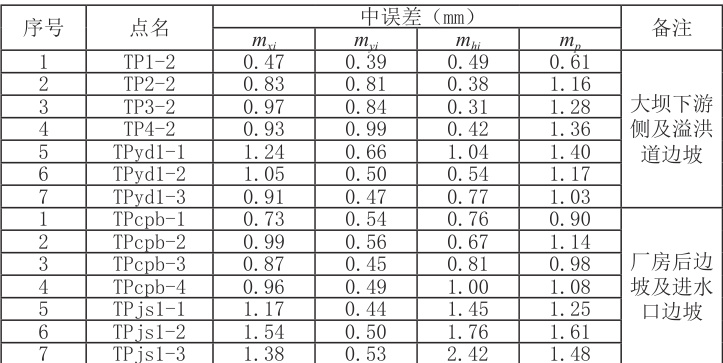
本项目利用某一期自动化监测数据,根据公式(9)计算出交会测量监测点的平面精度。通过两个测站分别测量出监测点的高程,然后把两个高程的平均值作为最终的监测值,其高程平均精度计算公式为:

其中: mh12 mh22 为两个测站对应的监测点的高程中误差,由公式(7)计算。
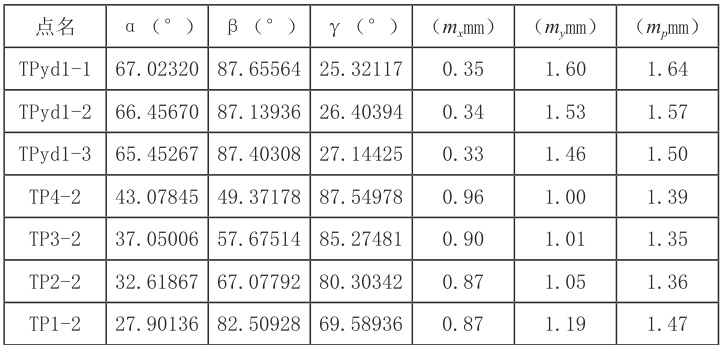
从上表可知,本项目通过极坐标法和前方交会方法进行自动化监测时,精度满足《土石坝安全监测技术规程》(DL 5259-2010)中“表面水平垂直位移监测精度 ±3mm′′ 要求。
四、外观自动化监测系统技术特点及使用要求
(1)系统可选择 2 个及以上多个后视点,测点自动开展气压、干温、湿温等气象条件监测,修正联合解算数据精度更高。
(2)系统开展监测前进行各测站联测自检,有效的校验测站的稳定性,精确反馈水工建筑物实时变形情况。
(3)同轴双向棱镜每月进行检查,清理镜头污物,定期清除测站及监测棱镜附近的树木花草,确认保护罩有无遮挡观测视线,避免测量时对监测的遮挡及影响测量精度。
(4)定期检查全站仪是否倾斜过多(一般要求仪器倾斜不超过 2′) ,若倾斜过多可以进行整平工作,同时量取新的仪器高,
(5)每年测量大坝变形控制网时将测站点纳入联测或用平面控制网点校测测站点坐标,并在系统上实时更新数据。测量机器人需要每年定期进行仪器检验。
五、应用效果
星图测 XYT-100 型一体化观测站外观自动监测系统在苏洼龙水电站的应用,实现了坝体及边坡外观测点的自动化监测,在满足规范精度要求的同时,系统的实时性、高效性、高精度、高兼容性、可靠性,使维护更方便,大大减少了人工作业强度,该类系统具有无人值守、远程控制、自动化监测的特点,可为类似工程作为参考。
参考文献:
[1] 王敏吉, 张 松, 毛海东. 测量机器人自动监测系统在水电站安全监测中的应用. 自动化技术与应用 ,2023(10):123-125.
[2] 韩荣荣 , 柳 翔 , 吴 伟 . 水电站大坝外部变形自动化监测技术应用现状分析 . 大坝与安全 .2023(03):53-57.
[3] 朱光平, 陈刚, 高全, 李麒. 基于测量机器人的面板堆石坝表面变形自动化监测技术应用 [J]. 山西建筑 ,2020(16):10-12.
[4] 曾兴颖 , 贺映 . 测边前方交会法在大坝变形监测中的应用与分析 . 湖南水利水电 ,2023(01):5-7.
[5] 周建国, 赵思琦, 史波, 黎建洲. 基于测量机器人的大坝外观监测精度影响因素研究 . 人名长江 ,2022(09):115-120.
作者简介:朱道雄(1989.10—)、男、汉族、湖北孝感、现任职于金沙江上游水电开发有限公司苏洼龙分公司、工程师、工程硕士、主要从事水电站大坝安全监测和建筑物维护工作。张志鹏(1978.03—)、男、汉族、河北石家庄、现任职河海南自大坝工程部工程师,主要从事自动化监测系统安装调试工作。
.jpg)
.jpg)
.jpg)
.jpg)