.jpg)
章渊洁影

齐姝涵 高婷通讯作者 潘泓文
沈阳航空航天大学 辽宁沈阳 110136
2 引言
2.1 研究背景与意义
辽宁省作为水产养殖大省,面临生产方式粗放、劳动力短缺、病害频发等问题。传统清洁方式效率低下,残饵粪便堆积导致水质恶化(如对虾早期死亡综合症)。国家《" 十四五 "全国渔业发展规划》明确要求推动养殖智能化。本项目开发的水下清洁机器人可降低人工成本 30% ,提升养殖密度与成活率,助力绿色可持续发展。
2.2 研究目标
我省主要采用池塘养殖、网箱养殖和工厂化养殖等模式,近年来在鱼类、虾类、贝类等水产品养殖方面取得了显著发展。然而,随着产业规模的扩大,传统养殖模式下的诸多问题日益凸显,严重制约了行业的可持续发展。
(1)生产方式粗放,自动化水平亟待提升(2)劳动力结构失衡,专业人才短缺(3)养殖风险高,病害防控压力大(4)智能化装备短缺,技术适配性不足
针对上述问题,开发一款适用于海水养殖场景的智能清洁机器人具有重要的现实意义。该设备应具备以下核心功能:高效清洁、水质监测、智能控制、成本可控。
2.3 核心需求与技术参数调研辽宁、广东养殖基地后,确定设计目标
1. 重量≤40kg,便干単人搬込
2. 吸污宽度 ⩾ 50cm,速度 0.05-0.6m/s
3. 支持自主巡航与实时监控
4. 集成机械臂(抓取力5-10N
5. 水深≤ 200m ,量产成本 ⩽3 万元
3 技术矛盾与解决
3.1 存在主要问题
1. 续航力与轻量化矛盾:长续航需大容量电池增重,过重结构降低机动性并增加能耗。
2. 任务需求与成本控制矛盾:大尺寸清洁范围增加材料成本;耐腐蚀材料与高精度传感器推高造价。
3. 系统复杂度与操作便捷性矛盾:精准导航 / 监测需复杂多传感器融合算法,但用户要求“一键启动”简易操作。
3.2 解决方案
1. 续航与轻量化协同优化
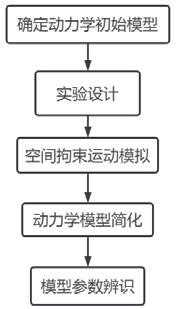
拓扑优化:CFD 仿真优化低矮扁平构型,涡流阻力少 28% 。
水动力建模:自研空间拘束运动算法,水动力系数计算周期从 2 月缩短至 72 小时,精度误差 <5%. 。
多物理场验证:6 自由度仿真平台验证俯仰/ 横滚稳定性。
2. 价值工程平衡成本
功能分级:核心功能标配,水质监测/ 云端管理等增值模块按需选配。
材料工艺:潜艇级密封技术,确保水下安全。
传感器性价比:选用低功耗工业级STM32 単片机,替代高成本PC104 或低
可靠性树莓派。
全周期成本控制:模块化设计降低维修成本 40% ;智能健康监测预测部件寿命,意外停机少 80% 。
4 系统设计与方法
4.1 总体设计框架
水下养殖池清洁机器人的工作原理基于智能感知-自主决策-精准执行的闭环控制逻辑,通过多系统协同作业实现高效清洁与水质监测功能。以下是其核心工作流程:
(1)环境感知与数据采集:导航定位、视觉识别系统、水质监测。
(2)智能决策与路径规划:任务模式选择、自主路径生成、异常处理(3)清洁执行与动力控制:履带驱动系统、吸污与机械臂协同作业(4)数据反馈与用户交互:实时监控界面、历史数据分析
4.2 核心子系统设计
4.2.1 机械结构设计
外形设计
CFD 优化仿生流线体,兼顾机动性与低阻力。
关键零部件的设计
(1)、推进器:采用面源法与优化设计方法相结合的方式,全力打造一款性能顶尖、结构强度可靠且重量轻盈的两叶桨。
(2)、耐压密封:潜艇级静密封 + 机械密封,保障 200m 水深安全。
(3)、清洁装置:履带式底爬结构提升越障能力,吸污宽度 ⩾50cm, 。
4.2.2 动力与控制系统
主控:STM32 単片机現 0.1-0.8m/s 无级变速,响应时间<0.1s。
动力学建模:CFD 水动力分析 简化运动模型,支撑精准控制。
5 理论设计计算
5.1 根本矛盾识别
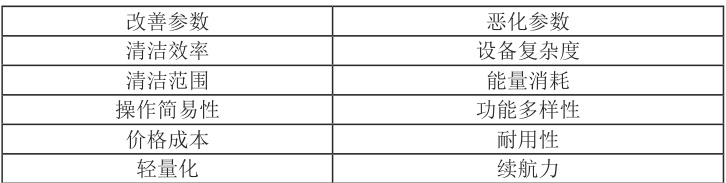
本研究基于TRIZ 理论系统分析了水下清洁机器人设计中的关键技术矛盾,如表1 所示。
表1 核心技术矛盾矩阵
5.2 创新设计方案库
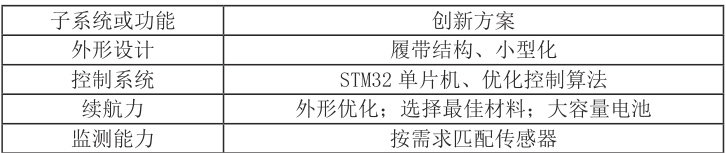
针对清洁机器人的设计,分析其需求 he 功能模块的作用,整合现有的技术资源,提出以下的创新设计方案。
表2 创新方案设计
6 工作原理及性能
6.1 工作原理
机器人基于仿生学与模块化设计,结合智能感知控制技术工作。流线型扁平结构经 CFD优化显著降低阻力。锂电池驱动两叶螺旋桨推进器提供动力,支持基本水下动作。配备仿章鱼触手机械手及履带式吸污装置,实现垃圾抓取和池底清洁。潜艇级密封技术保障核心部件安全。分层控制系统采用 PID 算法和多传感器融合,实现动态轨迹调整和清洁策略优化。Matlab 仿真验证其动力学模型响应快、稳定性与鲁棒性优于传统设计。
6.2 性能分析
1. 高效清洁:仿生机械手与吸污装置协同,自适应污染物,效率较人工提升 80% 以上。
2. 长续航低能耗:高能量密度锂电池结合能量回收,连续作业达8 小时。
3. 精准监测:多参数水质传感器实时采集数据,结合导航系统生成水质优化建议,降低病害风险。
4. 低成本易维护:模块化设计简化维修;工业级STM32 控制器替代高价方案,综合制造成本降 30% ,维护成本降 40% 。
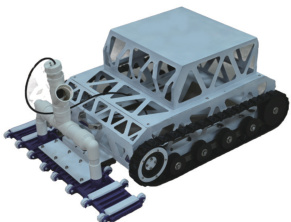
实测与仿真表明机器人操纵性能优异,在复杂水下环境稳定,为养殖业智能化提供支 ∠ 持。实物外形见图。
7 结论
本研究针对水产养殖智能化需求,成功设计并验证了集自主清洁、水质监测与导航于一体的水下机器人,为解决人工成本高、效率低、水质管理粗放提供了创新方案。关键技术包括:CFD 优化外形显著降低阻力;空间拘束运动模拟算法大幅缩短水动力建模周期。实验验证其在真实环境中续航长、监测精度高、综合成本低于同类设备,具备规模化应用潜力。局限在于对极端淤泥地形和高浑浊水体适应性不足。
未来研究将聚焦 AI 动态路径规划、轻量化材料升级,并探索与云端数据平台及养殖管理系统的深度集成,推动行业向“数据智能”转型。
参考文献
[1] 农业农村部.“十四五”全国渔业发展规划R. 北京:农业农村部,2021.
[2] 哈尔滨工程大学,中国科学院沈阳自动化研究所 .“潜龙”系列深海自主水下机器人技术报告R. 哈尔滨:哈尔滨工程大学出版社,2020.
[3] 上海交通大学海洋工程国家重点实验室.“海马号”遥控水下机器人(ROV)设计与应用 J. 海洋工程,2018,36(4):12-19.
[4] 中国海洋大学智能装备研究团队. 基于机器视觉的网箱附着物识别算法研究J. 水产学报,2023,47(3):45-53.
[5] 清华大学航天航空学院. 计算流体力学(CFD)在仿生机器人外形优化中的应用J. 机械工程学报,2019,55(7):89-97.
[6s]STMicroelectronics 中国公司 .STM32F4 系列单片机开发与应用指南 M. 北京:电子工业出版社,2021.
.jpg)
.jpg)
.jpg)
.jpg)