.jpg)
基于 Unity 3D 技术的中医外科实训系统设计与实现

张寅 顾青云
上海市浦东新区公利医院 上海市 200135
低位单纯性肛瘘是肛肠外科的常见病种,中医外科在肛瘘诊疗中积累了独特的理论体系与手术技法。传统中医外科实训需依赖“师带徒”模式,通过临床病例分析、模型操作和手术观摩实现技能传承。但传统实训模式也存在患者隐私保护、医疗风险以及难以量化评估操作规范性等局限性[1]。
随着数字技术的发展,医学教育模式正经历着革命性变革。最新研究显示,基于三维建模和交互式操作的沉浸式训练系统,能够有效构建零风险、可调控的教学场景,为中医外科等高精度临床技能培养提供了新范式。在手术模拟方面,数字化训练平台不仅提升了受训者的解剖结构辨识度和器械操作协调性,更通过多模态反馈机制精准复现组织弹性形变等生物力学特征[2]。虽然该技术已在针灸模拟器和推拿力学分析系统中取得应用突破,但对于设计复杂解剖层次的操作模拟,仍处于探索阶段[2]。
Unity 3D 引擎凭借其高效三维建模能力、跨平台兼容性及物理引擎支持,成为构建高保真医学仿真系统的核心技术。该技术通过融合Havok 物理引擎实现软组织生物力学重构,同步整合触觉感知接口构建力-形耦合交互体系,为中医外科虚实协同训练系统奠定技术支撑框架。本研究基于Unity 3D 引擎研发的低位单纯性肛瘘高精度手术模拟系统,可以突破传统师徒制传承模式中的资源限制,构建中医特色术式的数字化传承路径,并为手术标准化评估提供量化依据。
1.Unity 3D 技术概述
作为Unity Technologies 推出的多终端三维交互开发框架,Unity 3D 凭借其异构系统兼容特性与多物理场仿真能力,已成为医学教育数字化转型的核心技术平台。其多终端部署能力覆盖PC 端至 VR/AR 设备的完整生态链,可支持HTC Vive、PICO 等设备。结合C#编程架构与NVIDIA PhysX 物理引擎,可精准实现生物组织形变、器械力学反馈等中医外科手术仿真的关键技术需求。本研究选用该引擎构建肛瘘手术训练系统,主要基于三重技术适配性:首先,可视化节点编辑器与实时渲染管线显著提升中医特色术式动作捕捉与三维重构效率;其次,跨平台编译特性确保教学资源在移动终端、VR 头盔等设备的无缝迁移;最后,开源社区生态为中医外科知识图谱的数字化转化提供持续算法支持[3]。
2.系统功能的设计与实现
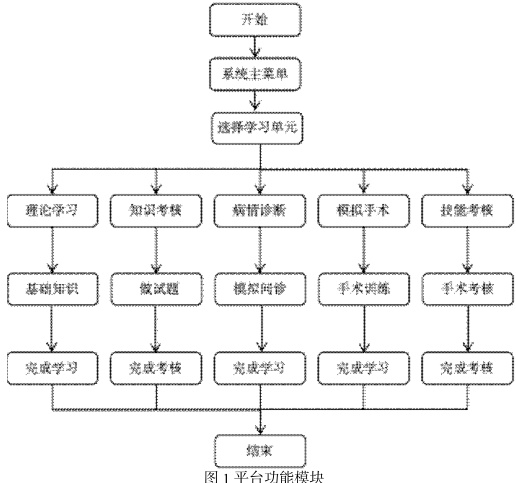
低位单纯性肛瘘手术仿真实训平台依托中医理论与触觉技术,构建沉浸式 VR 实训环境,实现肛瘘诊疗全流程模拟。从系统功能设计出发,构建3D 模型、病情问诊、手术操作及考核体系的实现路径,通过搭建“理论知识-实践操作-考核评估”一体化架构,为中医外科虚拟实训提供创新解决方案。平台具体功能模块构成如图1所示。
3.3D 建模设计与实现
3.1 场景建模
采用 3ds Max 建模软件,根据实地采集照片和视频构建中医诊疗室与手术室核心场景。中医诊疗室以木质纹理与暖色调为主,配置诊桌、诊疗室和换药室,还原“望闻问切”传统问诊环境;手术室遵循无菌操作标准,三维建模完整呈现手术床、无影灯及器械台等核心设备,地面墙面选用防滑抗腐蚀材质贴图,运用光影渲染技术真实还原手术室冷光照明效果,构建出具备临床真实度的沉浸式手术环境,手术室部分模型如图 2 所示。手术室采用模块化三维资产库架构实现关键要素集成,手术设备集群严格遵循手术室布局规范;界面材质系统基于 PBR 渲染流程,实现抗菌地坪的摩擦系数可视化及墙面抗腐蚀特性的物理参数化表达;采用 GI 全局光照算法模拟层流净化系统的冷光谱分布特性,通过光线追踪技术重构手术室特有的低色温照明环境。
图2 手术室模型

3.2 角色与器械建模
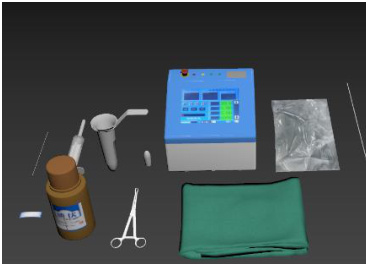
患者模型基于人体解剖学数据,精确构建肛周组织三维结构,肛瘘外口、内口及瘘管路径通过分层建模实现可视化。手术器械包括爱丽丝夹、注射器、缺口肛门镜、探针、激光器及激光导丝等,采用3ds Max 和Photoshop软件绘制完善材质贴图,模拟金属器械的光泽度与塑料部件的磨砂质感,相关设计图稿如图 3 所示。力反馈设备适配模块通过 API 接口与器械模型绑定,确保操作时触觉反馈与虚拟动作同步,如探针探入瘘管时、光缆烧灼时的阻力反馈。
3.3 构建场景
使用Unity 3D 创建两个新场景,分别是中医诊疗室和手术室。接着,把构建场景所需的资源,如模型、纹理、材质等导入到项目的“Assets”文件夹里。在虚拟场景构建过程中,首先根据实际采集的手术室数据优化每个场景的细节。按医疗规范设计设备布局,精确摆放手术床、器械台等关键模型;为地面、墙面等添加防滑、耐腐蚀的材质效果,增强环境真实感;配置冷色调照明系统模拟无影灯效果。最后,对场景进行测试和优化,在Unity 3D 的编辑器中运行场景,测试场景的布局、光照、特效和交互功能是否正常。对场景中的光照、模型面数、纹理压缩等参数进行性能优化,以手术室场景Unity 光照烘焙中的三个光照参数Direct Samples(直接光照采样)、Indirect Samples(间接光照采样)和 Environment Samples(环境光采样)为例,参数数值设置越高则会提高光照质量(如减少噪点、提升细节),但会显著增加烘焙时间,降低图像渲染速度,所以需要通过调试确定合理的数值,以平衡渲染效果和时间。
图 33ds Max 手术器械模型
4.理论知识模块设计与实现
理论学习模块以中医肛瘘诊疗理论为核心,整合西医手术技术,形成十大知识域,采用“基础理论-诊疗技术-实践应用”三层递进结构:
4.1 基础理论层
包含“肛瘘概述”和“中医理疗”,系统讲解中医“肛漏”病名渊源、病因病机、证型分类及中药内服、针灸治疗原则,结合西医病理机制阐释肛瘘发展过程。
4.2 诊疗技术层
涵盖“手术治疗”、“设备认知”、“麻醉知识”和“操作技术”,详细解析肛瘘现有手术方式的适应症、禁忌症,介绍半导体激光治疗仪原理、局部浸润麻醉方法及手术步骤中的操作要点。
4.3 实践应用层
聚焦中医特色护理技术、典型手术视频、术后并发症处理及饮食调护,涵盖术后护理、案例学习、并发症处理和注意事项四大板块。
手柄交互界面基于 Unity Graphical User Interface(UGUI)开发,采用摇杆控制视角、侧键唤出菜单、扳机键确认的操作模式。理论学习模块通过层级清晰的UI 元素,实现内容切换、状态显示及视频播放控制,界面融入医学元素,强化诊疗主题文化特色。
5 实践操作功能设计与实现
5.1 门诊接诊功能设计与实现
门诊接诊流程采用全对话交互模式,通过语音与文字同步呈现患者反馈,嵌入双关键问题强制验证机制(检查项目选择、病情诊断分型),确保学习者精准掌握辨证逻辑。
检查项目选择基于《中医肛肠病学》诊断标准,设计肛周 MRI、B 超检查、血常规等选项。系统通过碰撞侦测机制捕捉手柄控制器交互行为,用户选择错误时触发提示,通过高亮显示告知正确选项,帮助用户精准定位知识盲区并强化记忆。检查报告生成模块融合西医影像数据。
病情诊断验证集成中医辨证分型,即低位单纯性、高位单纯性、低位复杂性、高位复杂性四种类型。当用户根据检查报告选择疾病类型时,系统通过规则引擎验证答案正确性。
5.2 模拟手术功能设计与实现
5.2.1 手术准备阶段
显示术前须知内容,待用户准备好之后开始手术。麻醉方式选择模块预设局部麻醉、静脉麻醉等选项,错误选择时弹出提示。消毒铺巾环节通过物理引擎模拟棉布团蘸取碘伏的拖拽动画,操作需遵循中医“从外到内、由洁到污”消毒原则、“无菌方巾覆盖范围”等原则。
5.2.2 核心操作流程
探针定位内口环节结合力反馈技术,模拟中医“触诊探瘘”手法,探针探入瘘管时的阻力变化与虚拟场景同步,接触内口时触发特定反馈。调整激光器参数,对其进行简化处理,实际上需根据具体实施情况动态调整。光缆烧灼动画通过粒子系统实现,灼烧轨迹需与瘘管路径精确匹配,退出操作需符合“从内口缓慢拔出,避免残留病邪”的临床规范。
5.2.3 术后处理验证
伤口处理模块要求正确放置纱布与药栓,通过碰撞体积检测确保药栓沿直肠推入,错误放置时显示提示。整个手术流程采用步骤状态机管理,前序步骤未完成时,后续操作按钮保持禁用状态,保障手术流程的逻辑性与安全性。
6.结语
本研究基于 Unity3D 引擎与触觉反馈技术,构建了面向低位单纯性肛瘘手术的中医仿真实训平台,实现了中医外科诊疗理论与现代虚拟仿真技术的深度融合。系统借助高精度三维建模、多模态交互设计以及中西医融合的考核体系,有效解决了传统中医实训中病例资源不足、操作风险较高、评估标准不清晰等难题,为中医外科手术技能的标准化传承开辟了创新性路径。同时,系统整合中医辨证逻辑与手术操作规范,形成“理论-实践-考核”闭环教学模式,为中医外科教育注入了数字化活力。未来研究需进一步优化触觉反馈的精度与多模态交互的自然性,拓展复杂性肛瘘术式的模拟场景,并探索人工智能技术在动态病理生成与个性化评估中的应用。
参考文献
[1]李明楠,俞婷薇.基于 Unity3D 引擎的虚拟实训教学管理系统设计[J].信息与电脑,2024,36(23):22-24.
[2]王海婴,王赵依楠,吴亚莉.Unity3D 虚拟现实技术开发[M].化学工业出版社:202206.177.
[3]胡静,胡欣宇.基于 Unity3D 引擎的游戏设计与开发[J].电子元器件与信息技术,2021,5(02):138-140+15
作者介绍:
张寅(1986 年12 月)男,汉族,硕士,浦东新区,高级工程师,从事医疗信息化工作顾青云(1984 年8 月)男,汉族,硕士,浦东新区,工程师,从事医疗信息化工作课题名称:基于中医理论和触觉技术的低位单纯性肛瘘手术仿真实训平台项目课题编号:PDZY-2023-1102
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)