.jpg)
基于Emulate3D 的非标产线设计及仿真验证

龙超
人力宝科技有限公司四川德阳分公司 四川省德阳市 618000
在制造业中,非标自动化产线因其高度定制化和灵活性,成为满足个性化生产需求的重要手段。然而,传统非标产线设计依赖二维图纸和经验判断,存在设计周期长、验证困难、沟通效率低等问题,难以适应现代制造业快速发展的需求。随着数字化技术的兴起,利用虚拟仿真和三维建模工具优化非标产线设计成为可能 [2]。Emulate3D 软件凭借其强大的三维建模、动态仿真和虚拟演示功能,为非标产线的方案设计与优化提供了高效、直观的解决方案。本文以 Emulate3D 软件为工具,以某项目焊接、喷漆、烘干集成工作站点为基础,研究其在非标产线设计优化中的应用,旨在通过数字化手段提升设计效率、缩短项目周期,并为非标产线设计提供新的思路和方法 [3]。
1. 工作站点工艺需求
该工作站工艺内容包含焊接、喷漆、烘干固化,工艺流程如下所示:

焊接:对来料产品底部使用激光焊进行焊接,保证产品结合稳定,在后期使用过程中结实耐用;
喷漆:在产品表面喷涂水性漆,提升产品后期在盐雾使用环境下的耐腐蚀性;
烘干固化:对喷漆后的产品进行加热烘干,提高漆层的硬度、耐磨性和耐腐蚀性能。
1.1 工序实现设计:
1.1.1 上料:为提升站点自动化程度,降低站点人员参与率,使用机器人进行在制品上料;1.1.2 焊接:设计焊接工作台,半成品置于工作台上,机器人末端配置快换装置,通过更换焊枪持取机构,实现上下料夹具与焊枪的快速切换,提升机器人的应用灵活性,实现其多任务处理能力;
1.1.3 喷漆:使用机器人+ 夹具作为工件持取机构,夹取产品伸入自动喷漆框内,完成喷漆后,自动退出;
1.1.4 烘干固化:使用机器人+ 夹具作为工件持取机构,夹取产品伸入加热室内,完成烘干固化后,自动退出;
1.1.5 下料:使用机器人+ 夹具作为工件持取机构,将产品放回输送线,进行流转生产。
2. 站点布局规划
站点为多工序集成工位,为实现工位功能的高度集成,同时提高站点的空间使用率,设计采用 U 型布局形式,设计焊接台、喷漆、烘干、机器人末端夹具放置台,同时设计防护隔离门作为工位与环境隔离,避免焊接、喷漆、烘干作业过程中,对外部环境造成声、光、污染物等污染情况。
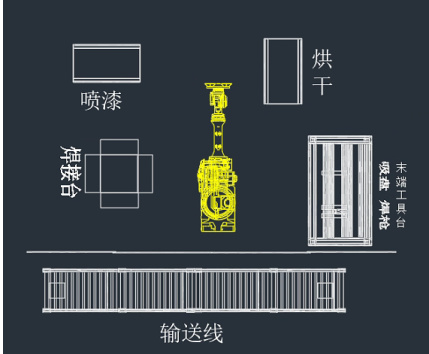
3. 站点模型搭建
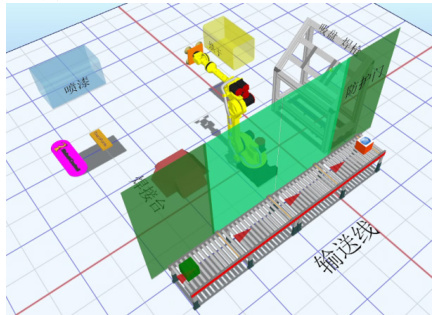
根据站点工艺布局规划,通过Emulate3D 内置模型库,对站点布局建立仿真模型;站点由输送线、隔离门、机器人、地轨、焊接台、喷漆盒、烘干固化盒、机器人末端工具放置架等组成;
根据规划设计需求,对各模块进行参数设置及程序写入;
对吸盘及焊枪进行重置事件代码写入,确保模型重置后,两个末端夹具处于初始化位置;
设置喷漆、烘干作业路径;吸盘将工件抓起,机器人通过地轨向喷漆工序移动一定距离,然后将货物放置于喷漆工序示意内(为便于后序观察加工状态,此处对工件颜色进行修改),完成喷漆后,将货物移出,送至烘干工序,完成后,将工件放置于输送机上,完成工件该工位全部加工,进行下一工件加工。
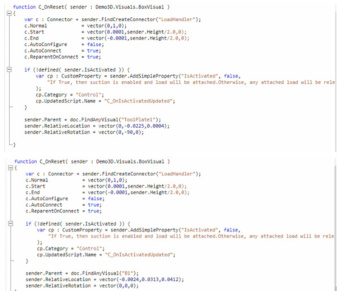
设置机器人更换末端工具;吸盘工具移动到 ToolNestA,再将吸盘工具放置于 ToolNestA 上,吸盘的父级设置为 ToolNestA,机器人移动到 ToolNestB,取焊枪;焊接完成后,把焊枪放回工具架,设置焊枪的父级为 ToolNestB, 然后取吸盘回到 TeachPoint0, 设置机器人的Tool 为吸盘。
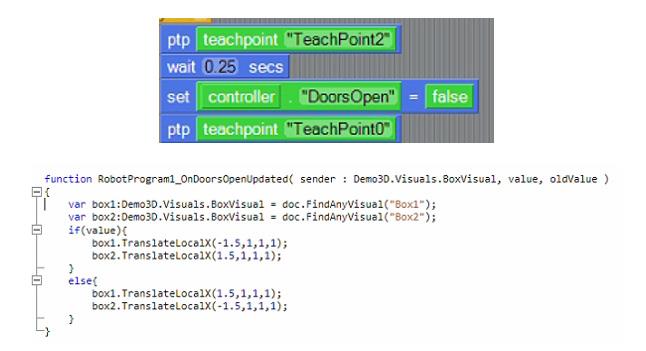
设置焊枪移动路径;通过新增 TeachPoint,编写移动程序,完成焊接动作;
设置喷漆、烘干作业路径;吸盘将工件抓起,机器人通过地轨向喷漆工序移动一定距离,然后将货物放置于喷漆工序示意内(为便于后序观察加工状态,此处对工件颜色进行修改),完成喷漆后,将货物移出,送至烘干工序,完成后,将工件放置于输送机上,完成工件该工位全部加工,进行下一工件加工。
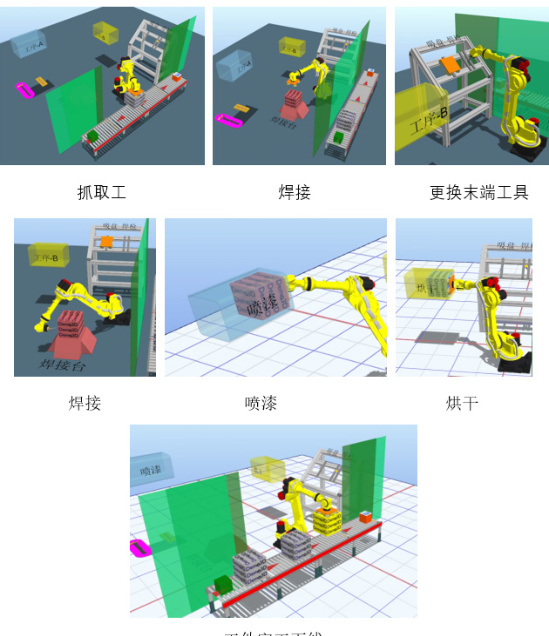
4. 站点仿真展示
设置机器人末端吸盘工具移动及工件属性;吸盘工具移动到 TeachPoint0( 焊接台上面 ),然后吸盘工具移动到 TeachPoint4,箱子的颜色变为红色,再把箱子的物理属性关闭,之后箱子的父级设为scene,吸盘工具再移动到TeachPoint0。


5. 结束语
本文通过建立基于 Emulate3D 的工作站点模型,进行站点工序动作模拟,实现了方案的动态化展示。同时,对机器人选型后的可达范围验证,确保了站点结构及设备选型设计的有效性及可行性,避免了基于理论设计缺少数模验证的矛盾性。仿真为设计提供了有力支撑,为后期产线设计规划或站点设计提供了清晰的思路和参考,具有重要的实际应用价值。
参考文献:
[1] 王雷顶 , 高长水 , 程晓鑫 . 基于 Emulate3D 的某汽车总装线仿真 [J]. 机械制造与自动化 ,2017.[2017-04-20]
[2] 张红兵. 智能制造技术在工业自动化生产线中的应用[J]. 造纸装备及材料,2022(01)
[3] 李杰林. 基于Demo3D 沉浸式开发环境的智能工厂工艺规划. 第十六届中国航空测控技术年会论文集,2019.[2019-07-12]
作者简介:龙超,(1992.09-),男,汉族,大学本科,职称:助理工程师,研究方向:非标产线设计规划
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)