.jpg)
基于有限集模型预测的永磁同步电机自抗扰控制策略研究

李翔宇 张中然 张森
鲁东大学交通学院 山东省 烟台市 264025;威海长青海洋科技股份有限公司 山东省 威海市 264316;山东汇科电气技术有限公司 山东省 威海市 264200
中图分类号:TM 351 文献标识码:A
引言
与传统的电励磁同步电机相比,PMSM 因具有效率高、运行可靠等优点,已广泛应用于交通运输、民用、汽车驱动等诸多领域 [1]。如何应对 PMSM 的多变量、强耦合、非线性等复杂特性,实现高性能的控制一直是关注的重点问题 [2]。具有代表性的 FOC 控制策略采用转速环、电流环双环 PID 调节,结合SVPWM 调制算法,实现转速的闭环控制,转速跟踪性能良好 [3]。但是该模型的PID控制对参数和外部扰动变化敏感,需要大量实验进行精细参数调节。另外,SVPWM 开关频率固定、计算相对复杂、对模型误差敏感,并且在复杂环境下,SVPWM 的动态响应能力有限。实际运行环境中存在各种噪声和干扰,例如传感器噪声、电磁干扰等,严重影响该模型的控制效果。
永磁同步电机(PMSM) 数学模型
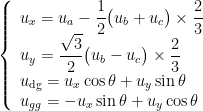
在对 PMSM 模型进行理论分析时,通常做以下假设:忽略磁饱和,磁路视为线性,电感参数不变;定子电枢绕组中的感应电动势均为正弦波;转子上没有阻尼绕组;电机齿槽无影响[8]。基于以上假设;对于PMSM 而言, 建立 d-q 坐标系下的永磁同步电机数学模型 [9] 如下:
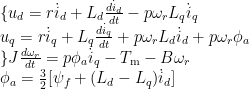
式中:  ,
,  分别为d, q 轴的绕组电流, ud , ∇uq 分别为d,q 轴的绕组电压;Ld , Lq 分别为 d , q 轴绕组电感 ;r 为定子电阻;p 为电机的极对数;ωr 为转子角速度; Ψf 为永磁体的磁链; Tm 为负载转矩;J、B 分别为总等效转动惯量和总等效摩擦系数。
分别为d, q 轴的绕组电流, ud , ∇uq 分别为d,q 轴的绕组电压;Ld , Lq 分别为 d , q 轴绕组电感 ;r 为定子电阻;p 为电机的极对数;ωr 为转子角速度; Ψf 为永磁体的磁链; Tm 为负载转矩;J、B 分别为总等效转动惯量和总等效摩擦系数。
噪声环境永磁同步电机 FCS-MPC- LADRC-MAF 控制策略
传统 FOC 动态响应能力弱,抗干扰方面能力不足,其原因主要在于 PID 控制器需精确解耦和参数敏感,SVPWM 调制算法的也存在固有延迟 [10]。本文采用 FCS-MPC 和 LADRC 控制器可提高模型的鲁棒性。
2.1 有限集模型预测原理
FCS-MPC 是根据一个控制周期的电流、电压以及电机相关参数,预测未来多个周期的所有电压矢量,从中选出最优电压矢量,输出 PWM 信号,从而合理分配电压矢量持续时间。控制集包含 8 个基本电压矢量,即 6 个有源电压矢量和 2 个零电压矢量,其中两个零电压矢量对电机的控制效果相同,所以零电压矢量只考虑一种即可[11],其流程如图 1 所示:
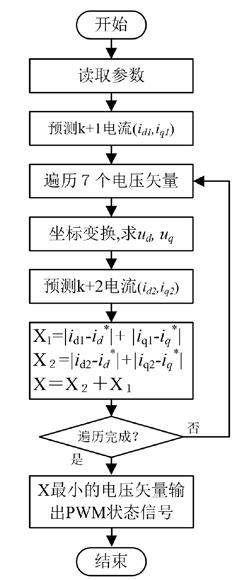
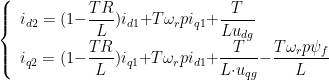
(1)预测 k+l 时刻电流
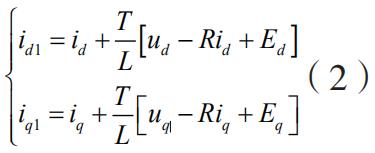
其中:
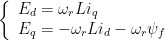
(2)电压从 abc 转到 d-q 坐标系,得到 k+1 时刻的预测电压 udg 、 uqg
(3)预测 k+∇2 时刻电流
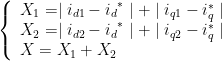
(4)遍历完 7 个电压矢量后,将 k+2 时刻预测的电流与设定值  作差,并计算出总误差,选取总误差最小的电压矢量,并输出最优开关状态。
作差,并计算出总误差,选取总误差最小的电压矢量,并输出最优开关状态。
2.2 线性自抗扰控制器原理
线性自抗扰控制器(LADRC)引入了带宽的概念,将扩张状态观测器(ESO)转化为线性扩张状态观测器(LESO),使参数个数大大减少 [12]。LESO是 LADRC 的核心,针对系统外部扰动和内部扰动进行全程估计和补偿,不依赖于任何数学模型,鲁棒性强。
LADRC 原理如图 2 所示,一阶 LADRC 由被控对象( Plant )、LESO、总扰动(w)、设定值(r)、控制器增益(k)、扰动补偿增益(1/b)、被控对象输出( ⟨yp⟩ 组成。
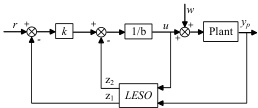
一阶LADRC 被控系统方程:
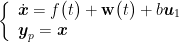
式中: u1 为控制量; f(t) 为系统内部扰动; w(t) 为系统外部扰动。一阶 LESO 方程:
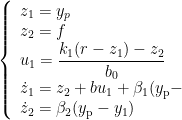
式中: y1 为被控对象的标准值; z1,z2 为观测器的状态值; β1 、β2 为观测器的增益。LADRC 只需要调节观测器带宽,系统带宽和增益就能得到较好控制效果,其中观测器带宽表示扩张状态观测器的跟踪速度,过大容易引起观测器震荡,使系统丧失稳定性 [13]。
2.3 噪声模拟与滤波(1)噪声模拟
电机实际工作中的干扰是由大量独立随机因素叠加而成,例如:传感器噪声、电磁噪声、逆变器开关干扰、电机转动引起的轴承噪声等。根据中心极限定理,这些独立随机变量的总合服从高斯分布。高斯白噪声的功率谱密度在整个频域中恒定,能实现全频段干扰,符合实际系统中的宽频谱干扰特性 [14]。为模拟永磁同步电机在实际运行中受到的复合干扰,在输出信号(ia,ib,ic)中注入均值为0,方差为 0.5 的高斯白噪声。
(2)滑动平均滤波器
滑动平均滤波器(MAF)是在若干样本窗口内计算平均值,并将此平均值作为输出值。当窗口沿着信号移动时,计算窗口中数据的新平均值,从而得到平滑后的信号,抑制了高频噪声[15]。MAF 工作原理如式9 所示。

式中: f[n] 为输出信号, x[n-k] 是输入信号,n 是滑动窗口的大小。本文MAF 应用在所有含噪信号进入坐标转换和编码器之前,确保这些反馈信号能实现PMSM 的精准控制。
仿真研究
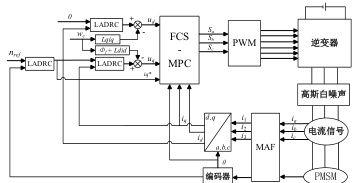
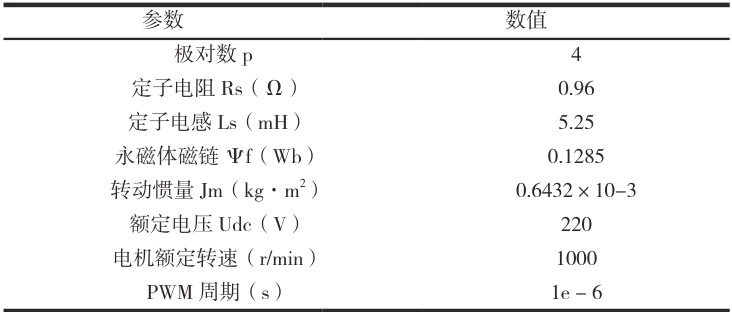
为了验证所提出的复合控制方案的有效性,在 Matlab/Simulink 环境下搭建了 FCS-MPC-LADRC-MAF 的系统控制模型如图 3 所示,并与传统 FOC 进行对比,SPMSM 的参数见表 1。
图 3 FCS-MPC-LADRC-MAF 系统控制框图
(1)FCS-MPC -LADRC 与 FOC 的转速控制
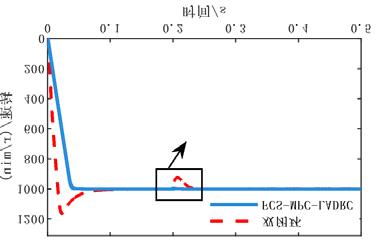
电机设定转速为 1000r/min ,负载转矩初始值为 0N.m 、终值为 10N.m 、阶跃时间 0.2s ,结果如图 4 所示。传统FOC 转速上升快,产生较大超调,并当负载变化时,转速波动较大。而 FCS-MPC-LADRC 方案能够使电机在较短时间内达到设定速度,没有产生较大超调,并且当负载发生变化时,转速波动大幅度降低。
图 4 FCS-MPC -LADRC 与传统 FOC 比较
(2)噪声影响下系统稳定性对比
在理想模型中加入均值为0、方差为0.5 的白噪声,结果如图 5 所示。噪声干扰使得电机信号失真,传统 FOC 无法实现对电机转速的精准控制,而 FCS-MPC- LADRC 方案能在一定程度上抑制了电机受到的干扰,转速在设定速度上下波动。
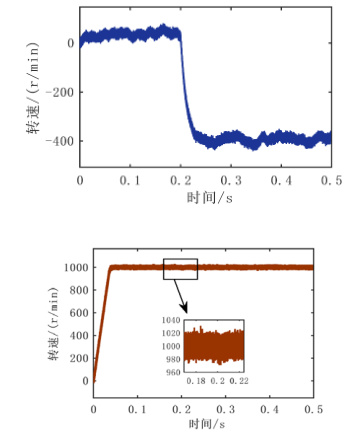
图 5 模拟噪声环境下,转速控制比较
结论
本文设计了一种有限集模型预测结合控制线性自抗扰以及滑动平均滤波器的控制策略 (FCS-MPC- LADRC-MAF)。该策略与传统 FOC 相比,采用有限集模型预测控制算法得到最优开关状态S 、S 、S ,增强了PMSM 的动态影响能力。采用 LADRC 控制器通过线性扩张状态观测器实时补偿模型内、外扰动。设计的控制策略在噪声干扰下,具有良好的鲁棒性,同时保持了优异的动态性能,降低了电流谐波率,提升了永磁同步电机对转速控制的稳定性。
参考文献
[1]《中国公路学报》编辑部. 中国汽车工程学术研究综述2023[J]. 中国公路学报 ,2023,36(11):1-192.
[2] 毛海杰, 李炜, 蒋栋年, 等. 基于线性扩张状态观测器的永磁同步电机状态估计与性能分析 [J]. 电工技术学报 , 2019, 34 (10): 2155-2165.
[3] 高旭生 . 基于自抗扰的永磁同步电机位置控制系统的设计与实现 [D]. 扬州大学 ,2023.
[4]Xu F A ,Zhu S X ,Yuan L , et al. Harmonic Suppression Strategy of Permanent Magnet Synchronous Motor Based on PCI and ADRC Methods [J]. Journal of Electrical Engineering & Technology, 2024, 20 (3): 1-14.
[5] 李爱平, 邓海洋, 徐立云. 基于模糊PID 的永磁同步电机矢量控制仿真[J].中国工程机械学报 ,2013,11(01):25-30+40.
基 金 项 目: 山 东 省 科 技 型 中 小 企 业 创 新 能 力 提 升 工 程 项 目(2023TSGC0690)科技型中小企业创新能力提升工程项目(2024TSGC0686)
.jpg)
.jpg)
.jpg)
.jpg)