.jpg)
基于卡尔曼滤波的动态目标轨迹预测研究

黄程凯 王成林
天津市先进机电系统设计与智能控制重点实验室 机电工程国家级实验教学示范中心 天津理工大学 天津 300384
1 引言
动态目标抓取作为智能制造与物流分拣领域的核心任务,是实现自动化生产与智能仓储的关键技术之一。然而,传统机器人抓取方法在面对动态目标时,普遍面临视觉感知延迟与控制执行滞后两大技术瓶颈。传统”感知 - 决策 - 执行”范式在动态场景中难以满足实时性与精度要求,亟需新型轨迹预测算法提供技术支撑。卡尔曼滤波(Kalman Filter,KF)因其卓越的状态估计能力,成为解决动态目标轨迹预测问题的关键技术 [1-2]。在航空航天、自动驾驶、机器人导航等多个领域得到成功应用 [3-4]。本研究提出一种基于卡尔曼滤波的动态目标轨迹预测方法,通过建立目标三维位置 - 速度状态模型,采用匀速运动假设构建状态转移矩阵,并结合高斯白噪声模拟视觉定位误差,实现目标轨迹的高精度预测。
2 卡尔曼滤波模型构建
动态目标轨迹预测的核心在于建立能够准确描述目标运动特性的状态空间模型。本研究采用匀速运动模型(Constant Velocity, CV)作为基础动力学模型,该模型假设目标在短时间内速度保持恒定,适用于中等速度变化场景下的轨迹预测。状态向量定义为六维向量,包含目标在三维笛卡尔坐标系中的位置与速度信息:
 ,其中, xk,yk,zk∈R 分别表示目标在X、Y、Z 轴上的位置坐标,
,其中, xk,yk,zk∈R 分别表示目标在X、Y、Z 轴上的位置坐标,  则对应方向的速度分量。过程噪声协方差矩阵Q 用于表征系统模型与真实动力学之间的偏差,其设计需兼顾模型不确定性与计算复杂度。本研究采用简化对角矩阵形式Q=q×1e-8×eye(6) ,其中, q 为缩放因子,可根据实际噪声水平调整。该设定确保了模型在保持较低计算复杂度的同时,能够适应目标运动的微小扰动。
则对应方向的速度分量。过程噪声协方差矩阵Q 用于表征系统模型与真实动力学之间的偏差,其设计需兼顾模型不确定性与计算复杂度。本研究采用简化对角矩阵形式Q=q×1e-8×eye(6) ,其中, q 为缩放因子,可根据实际噪声水平调整。该设定确保了模型在保持较低计算复杂度的同时,能够适应目标运动的微小扰动。
卡尔曼滤波算法通过递归的预测 - 更新循环实现目标状态的最优估计,通过最小化估计误差协方差的迹,实现动态目标状态的最优估计。其完整数学描述如下:
预测阶段: 
更新阶段: 
 Pk|k=(eye(6)-KkH)Pk|k-1
Pk|k=(eye(6)-KkH)Pk|k-1
3 仿真实验与结果分析
本研究搭建了“视觉感知 - 预测 - UR5 机械臂执行”的 matlab 仿真虚拟实验平台,根据卡尔曼滤波模型,设定如下实验参数:采样时间间隔 dt=0.01s (对应采样频率 100Hz ),平衡计算效率与动态响应速度;过程噪声协方差矩阵Q 采用简化对角矩阵形式,缩放因子q 根据目标运动微小扰动设定为 1×10-4 ,以适应中等速度变化场景下的模型不确定性;观测噪声协方差矩阵R 基于实验标定结果确定:视觉系统位置测量标准差 obs_noise_std  ,模拟视觉白噪声对位置观测的影响。
,模拟视觉白噪声对位置观测的影响。
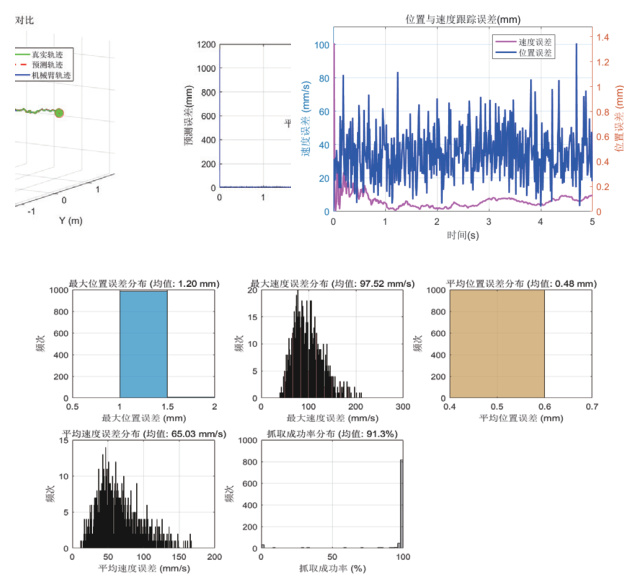
初始状态 πX0 设为首次观测到的目标位置(单位:m)与零速度假设,初始协方差矩阵 P0 设定为对角矩阵 P0=1×10-3⋅I6 。在 UR5 机械臂的实际抓取任务仿真测试中,基于本预测方法的抓取成功率从传统方法的低水平显著提升至 91.3% ,抓取时间优化至 2.4s⨀ 。
图1 仿真实验结果
4 结论
基于卡尔曼滤波的动态目标轨迹预测方法,通过匀速运动模型与高频率采样机制,实现了平均位置误差 0.48mm 的高精度动态跟踪;依托卡尔曼滤波的递归最优估计特性,有效抑制了标准差为 0.3mm 的视觉系统观测白噪声;通过高频递归计算与状态预测机制,将整体系统延迟降低至 80ms 以内,显著缓解了视觉感知延迟与控制执行滞后导致的时序失配问题;UR5 机械臂仿真测试表明,抓取成功率提升至 91.3% ,抓取时间优化至 2.4s ,验证了方法在实际机器人操作中的可靠性与实用性。
参考文献
[1] 苏雨 , 李润泽 , 张科 . 基于相关滤波和轨迹预测的视频卫星动态目标跟踪算法 [J]. 飞控与探测 , 2023, 6 (04): 18-25.
[2] 李卓隆 , 任永杰 , 林嘉睿 . 基于在线预测和规划的机器人动态跟踪抓取方法 [J]. 自动化与仪器仪表 , 2021, (10): 183-189.
[3] 符凯 . 基于自适应扩展卡尔曼滤波算法的道路纵向坡度估计[J]. 汽车实用技术 , 2023, 48 (06): 136-139.
[4] 金昶明 , 胡展展 , 汪震隆 . 基于扩展卡尔曼滤波的纵向车速与坡度估计 [J]. 汽车电器 , 2025, (07): 86-91+94 .
.jpg)
.jpg)
.jpg)
.jpg)