.jpg)
复杂背景下无人机快速检测算法

杨轩 蒋金华
江南机电设计研究所 550009
1 引言
无人机凭借独特优势在多领域蓬勃发展,但也引发了一系列安全问题。在实际应用中,无人机常处于建筑林立的城市、地形复杂的山区、气象多变的自然环境等复杂背景中。传统目标检测算法,如基于 HOG+SVM 的方法,因依赖手工特征提取,在复杂背景下难以精准捕捉无人机特征;基于深度学习的Faster R - CNN 等算法,虽有一定检测能力,但存在模型复杂、检测速度慢等问题,无法满足实时检测需求。因此,研究高效的复杂背景下无人机快速检测算法成为亟待解决的关键问题。
2 复杂背景下无人机检测面临的挑战
2.1 背景干扰复杂
复杂背景涵盖多种干扰因素。城市环境中,无人机易与建筑物轮廓、广告牌、空中线缆等混淆;自然场景下,植被、水面反光、云层等背景元素的纹理和色彩变化,严重干扰无人机目标识别。此外,光照强度变化、阴影区域存在,会使无人机成像产生明暗差异,增加特征提取难度。
2.2 目标特征差异大
无人机种类繁多,尺寸、形状和飞行姿态各异。微型无人机在远距离拍摄时,仅占图像极少像素,特征信息微弱;大型无人机在飞行中姿态多变,如俯仰、翻滚、旋转等,导致其在图像中的轮廓和结构特征不断变化。同时,无人机飞行速度不同,高速飞行时易产生运动模糊,进一步加大检测难度。
2.3 实时性需求迫切
在机场安防、交通管理等场景中,必须实时检测无人机,以便及时预警和处置。然而,复杂背景下的检测任务需处理大量图像数据,深度学习模型参数众多、计算复杂,普通算法难以在短时间内完成检测,无法满足实际应用的实时性要求。
3 无人机快速检测算法设计
3.1 自适应特征增强模块
设计自适应特征增强模块,该模块由动态卷积层和特征融合单元组成。动态卷积层采用可变形卷积核,能根据无人机目标形状和位置动态调整感受野,有效提取不规则目标特征。例如,对于倾斜飞行的无人机,可变形卷积核能自适应地扩大或缩小感受野,精准捕捉其边缘和轮廓。特征融合单元则结合多尺度特征信息,通过加权融合方式,将浅层的细节特征与深层的语义特征有机结合。利用注意力机制计算不同尺度特征的权重,突出与无人机目标相关的特征,抑制背景干扰,增强特征表达能力。
3.2 轻量化网络架构优化
以 MobileNetV3 为基础,对网络架构进行优化。在骨干网络中,采用逆残差结构和深度可分离卷积,大幅减少模型参数量和计算量。同时,调整网络通道数和层数,在保证特征提取能力的前提下,降低模型复杂度。在颈部网络,引入轻量级特征金字塔结构(Lightweight Feature Pyramid Network,LFPN),通过跨层连接和快速融合策略,实现不同尺度特征的高效交互,提升对不同大小无人机目标的检测能力。检测头部分,简化分类和回归分支结构,采用高效的损失函数,如 DIoU Loss,加快模型训练和推理速度,提高目标定位精度。
3.3 智能数据处理策略
数据预处理阶段,运用智能图像缩放技术,根据无人机目标在图像中的占比和位置,动态调整图像尺寸,避免因固定缩放导致的目标信息丢失或计算资源浪费。同时,采用数据增强方法,如随机旋转、平移、噪声添加等,扩充数据集多样性,提高模型泛化能力。模型推理时,利用 TensorRT 推理引擎对模型进行优化,结合 GPU 并行计算,加速推理过程。后处理环节,采用改进的自适应 NMS 算法,根据图像中目标密度和重叠程度,自动调整抑制阈值,有效减少漏检和误检情况,提升检测结果准确性。
4 实验验证
4.1 实验数据集
构建包含 15,000 张图像和 60 小时视频的复杂背景无人机数据集,覆盖城市、山区、乡村、水域等 10 种典型场景,以及晴天、阴天、雨天、雪天、雾天等 5 种天气条件。数据集中包含 40 种不同型号无人机,目标尺寸范围从 8×8像素到 220×220 像素。数据集按照 8:1:1 的比例划分为训练集、验证集和测试集,并使用专业标注工具进行精确标注。
4.2 实验环境与设置
实 验 在 配 置 为 Intel Core i9 - 13900K CPU、64GB 内 存、NVIDIA GeForceRTX 4090 GPU 的服务器上进行,操作系统为 Ubuntu 22.04,深度学习框架采用PyTorch 2.0。训练过程中,初始学习率设置为 0.0005,采用学习率衰减策略,每 20 个 epoch 学习率衰减 0.8。批次大小设置为 32,训练周期为 150 个 epoch。采用平均精度均值(mAP@0.5:0.95)、召回率、检测速度(FPS)和模型参数量(Params)作为评估指标。
4.3 实验结果与分析
将 本 文 算 法 与 YOLOv7、EfficientDet - D4、Swin - Transformer - basedDetector 等算法进行对比实验,结果如下表所示:

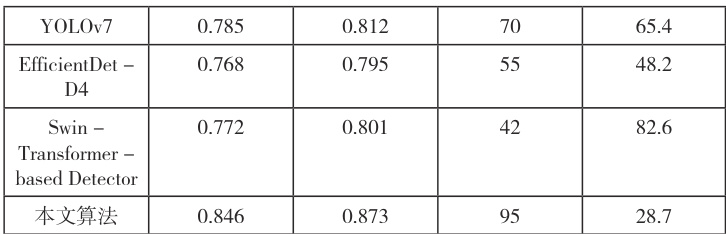
从实验结果可以看出,本文算法在各项指标上均表现出色。与 YOLOv7 相比, mAP 提升 7.8% ,召回率提高 7.5% ,检测速度提升 35.7% ,模型参数量减少 56.1% 。在不同场景下,本文算法也展现出良好的泛化能力。在城市场景中, mAP 达到 0.832 ;山区场景下, mAP 为 0.840 ;雨天场景中, mAP 仍保持在 0.815 这表明本文算法能够有效应对复杂背景,准确检测无人机目标。
结论
本文提出的复杂背景下无人机快速检测算法,通过自适应特征增强、轻量化网络架构优化和智能数据处理策略,有效提升了无人机在复杂环境下的检测性能。实验结果表明,该算法在检测精度、速度和模型轻量化方面均优于对比算法,满足实际应用需求。未来将进一步探索算法在多模态数据融合、边缘设备部署等方面的应用,提升算法的实用性和适应性。
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)