.jpg)
树莓派汽车夜间动物识别设计

史伟鲲 耿季炜
南通理工学院 江苏 南通 226000
1 引言
夜间行车环境中,光线不足导致驾驶员难以发现道路上的动物,导致动物碰撞事故频发,远高于白天的事故率。相关统计数据显示,全球每年因夜间动物碰撞造成的人员伤亡和财产损失数额巨大 [1]。同时,“路杀”现象对生态平衡造成严重破坏,部分野生动物种群数量下降,区域生物多样性受到威胁 [2]。当前主流的汽车夜间动物识别系统存在成本高、普及难度大、对小型动物识别能力不足等问题。
本文提出一种基于树莓派的低成本汽车夜间动物识别系统设计方案,融合红外热成像和毫米波雷达数据,结合改进的YOLO 目标检测算法,实现高精度、低误报率的动物识别预警功能,为动物碰撞防护技术的普及提供可行路径。
2 基于YOLO 的树莓派识别系统
本文设计的搭载在树莓派上的基于 YOLOV5s 算法的识别系统可以完成常见动物识别的工作。当检测到包含有目标物体后,将其目标区域内的目标物体特征提取出来,用已经训练好的分类器进行分类识别,从而完成动物和物种识别分类的工作。本文使用具有强拓展的卡片电脑树莓派作为运算平台,图像采集使用 USB 免驱 200 万像素摄像头,并且在最新 stretch 版精简了无用的功能。并且采用 COCO2017 数据集目标系统,使用其训练好的模型,在去除掉无用的分类后,可以针对:猫、狗、这2 种常见的动物进行识别。
3 设计实践:树莓派集成系统的技术路径
3.1 硬件系统设计
本设计选用的是树莓派 4B 作为主控制器,负责传感器驱动、数据融合、算法运行及预警决策。其低成本、低功耗、丰富接口及足够算力满足设计要求。
传感器集成设计部分是由热红外成像模块和毫米波雷达组成[3]。热红外成像模块采用 FLIR Lepton 3.5( 640×512 分辨率),通过 sPI 接口与树莓派连接,设计定制散热片解决车载高温环境下的稳定性问题,实测工作温度范围扩展至 - 40℃ ~85℃。选型理由:低成本、体积小、满足车载环境温度范围、提供目标温度特征。
毫米波雷达具有低成本、集成DSP/ARM 处理器、提供精确的距离、速度、角度信息、强环境适应性的特点[4]。其采用 AWR1642 单芯片模块,通过 UART 接口实现 10Hz 数据刷新率,设计金属屏蔽罩减少发动机电磁干扰,测试显示距离测量误差控制在 ±0.5m 内。同时,通过 UART或 sPI 接口与树莓派通信。
3.2 算法优化设计
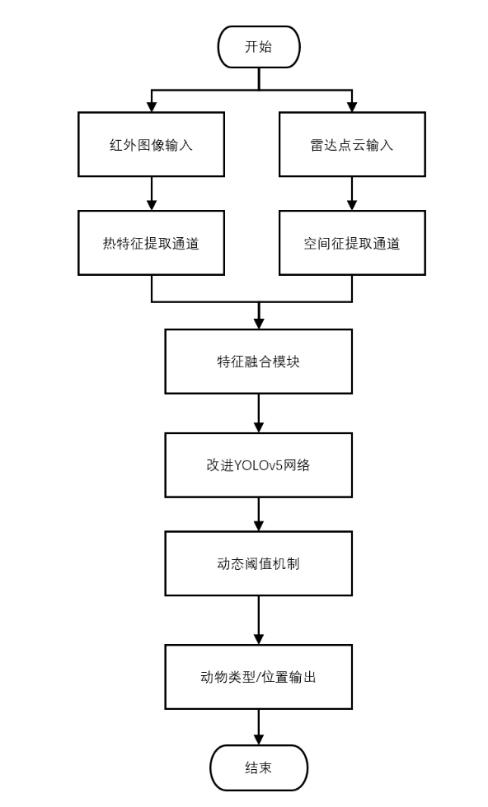
算法设计以 YOLO 模型为基础进行改进,重点解决小型动物识别精度低和误报率高的问题。针对热成像与雷达点云数据的特性,设计双通道特征提取网络:热成像通道负责捕捉动物的温度分布特征,利用红外图像中动物与环境的温度差异增强目标显著性;雷达点云通道则提取目标的三维空间位置、运动速度等信息,弥补热成像在复杂背景下的识别不足。
为降低误报率,引入动态阈值机制。通过分析树叶晃动、车灯干扰等常见干扰因素的特征,设定自适应阈值,仅当检测目标的特征匹配度超过动态阈值时触发预警,减少因环境干扰引发的误判。同时,利用雷达点云的稳定性过滤掉静态干扰目标,进一步提升算法的鲁棒性。具体流程如图3-1 所示。
3.3 YOLOv5 的改进
为了提升模型在复杂夜间环境下的检测精度和鲁棒性。优化输入层,提高夜间图像质量的同时改进网络结构,增强特征提取能力并对损失函数进行改进。
3.3.1 输入层优化
应用 Retinex 算法,通过分解图像的光照和反射分量,针对性抑制夜间环境中的非均匀光照,避免单纯提亮导致噪声放大;优化 CLAHE算法,将图像分块进行局部直方图均衡化,限制每块的对比度阈值,避免因为夜间暗区域过度增强后产生的伪影。
3.3.2 网络结构改进
YOLOv5 主要由四个部分组成,分别是 input、backbone、 neck、prediction[5]。在骨干网络的 CSP 层后插入 CBAM,先通过通道注意力筛选关键特征通道,再通过空间注意力定位目标区域,双重过滤夜间复杂环境的干扰。在 NECK 的 FPN/PAN 的结构中嵌入 SE 模块,通过squeeze 操作压缩通道维度,excitation 操作强化有效特征 [6], 。SE 注意力机制认为不同通道的特征图,重要性是不一样的,因此需要对其分配不同权重,从而可以提升模型对包含小目标信息的特征的关注。
针对夜间样本“背景占比超 90% ”的问题,设置 Focal Loss 的聚焦参数γ=2(加大难样本权重)、平衡参数 α=0.25 (降低背景类权重),避免模型被大量简单背景样本主导训练。其公式为:

3.3.3 损失函数改进
其中 P1 是预测为目标类别的概率, ∝ 是平衡参数,γ 是聚焦参数。边界框损失的优化:在 CIoU Loss 基础上,对边界框的宽高维度引入“小目标权重因子”强化对夜间小型动物的定位精度,其公式为:

其中 P2 ( b,bgt )是预测框与真实框中心点欧氏距离的平方,c 是最小包围框对角线长度, α 是权重系数,v 衡量宽高比一致性。
在设备搭建完成后,我么们对猫,狗,牛,羊等夜间道路常见动物进行识别测试。每类测试样本 100 个,总计 400 样本,狗的识别率准确率最高达到 97% ,羊的准确率较低为 93% 。
实验结果表明,本系统具备相对良好的夜间动物识别效能:所采用的多源数据融合算法通过红外热成像温度特征与雷达空间信息的协同分析,有效提升了小型动物的识别精度;创新引入的动态阈值机制可对环境干扰进行有效过滤,显著降低系统误报率。同时,结合本土化动物行为数据集的训练优化,系统在 30-70km/h 车速范围内能够较好适配国内道路场景,为夜间行车中动物碰撞事故的防护提供了可靠技术支持。
4 结果验证
5 总结
夜间动物碰撞事故的解决需要技术创新与成本控制的双重突破。本研究基于树莓派平台设计的汽车夜间动物识别系统,通过构建本土化数据库、改进多源融合算法、优化预警逻辑,在保证识别性能的同时大幅降低了成本。该系统不仅为夜间行车安全提供了技术保障,也为保护区域生物多样性贡献了力量。随着技术的不断完善,低成本夜间动物识别系统有望成为汽车的标配功能,推动交通生态安全体系的构建。
参考文献
[1] 程浙安 . 基于深度卷积神经网络的内蒙古地区陆生野生动物自动识别[D]. 北京:北京林业大学,2019.
[2] 王群 . 新能源汽车动力电池测试系统开发 [D]. 北京 : 北京交通大学 , 2019:45- 47.
[3] 宫一男,谭孟雨,王震,等 . 基于深度学习的红外相机动物影像人工智能识别:以东北虎豹国家公园为例 [J]. 兽类学报,2019,39(4):458- 465.
[4] 杨铭伦,张旭,郭颖,等 . 基于 Y OLOv5 的红外相机野生动物图像识别 [J]. 激光与光电子学进展,2022,59(12):382- 390.
[5] 向秋敏 . 野生动物监测图像显著性检测算法及应用 [D]. 北京:北京林业大学,2017.
[6] 周文萱 , 胡龙桃 , 张敏 , 等 . 基于 Y OLO 的小型动物识别系统设计 [J]. 计算机时代 ,2019,(03):22- 25.
课题项目:2025 年大学生创新创业训练计划项目《汽车夜间动物识别设计》(编号:X DC2025026)。
作者简介:史伟鲲(2003 年 3 月),汉族,盐城人,本科,研究方向:车辆工程。
作者简介:耿季炜(1995 年5 月),汉族,人,研究生,讲师,研究方向:车辆工程。
.jpg)
.jpg)
.jpg)
.jpg)