.jpg)
沈阳首架“ 他机试飞” 中试验证平台无人机的研制

孙奉道 李文杰 孙荣国 黄鸣鹂 张驰
沈阳航空产业技术研究院有限公司 辽宁沈阳 110034
中图分类号:TP273
1 引言
无人驾驶飞机简称 “ 无人机” ( unmanned aerial vehicle,UAV) ,是利用无线电遥控设备和自备的程序控制装置操纵不载人的飞机,或者由车载计算机完全地或间歇地自主操作,其与有人驾驶飞机最大的区别就是座舱 。随着人工智能、机器学习、传感器技术和通信技术的不断进步,无人机的自主化水平得到了显著提升,使其能够在复杂环境中执行多样化任务。未来,无人机技术将继续与5G、人工智能等新兴技术深度融合,进一步拓展其应用场景和市场空间。
主制造商研制某款新技术、新设备,要采用一些新概念、新技术、新方法等,为规避风险,一般会用已有成熟机型改装一个空中试验平台,对相关的新概念、新技术、新方法进行研究、验证。在试飞试验领域,这样的试飞技术,简称为“ 他机验证试飞技术” 。按可提供的功用可分为:技术验证机(用于航空航天新系统、新技术、新材料的验证),空中实验室(用于空中环境的专业实验室、空中作业的专业实验室等),探索性试验机(用于未知科学领域、新理论、新概念、创新性的试飞验证)等。他机验证试飞技术已从单纯用于飞行品质领域的研究迅速扩展到飞行动力学特性、发动机、控制律、飞控系统、航电系统、多系统综合技术、5G 通讯等方面进行他机验证的研究。
沈阳首架“ 他机试飞” 中试验证平台无人机以高升限、长航时、模块化为主要设计特点,是一种中、远程无人机系统,主要装备包括无人机、地面车载遥测遥控站和地面保障设备。该无人机采用活塞发动机,巡航高度 3000m ,最大起飞重量约1100 公斤、任务载荷 300kg ,翼展15.6 米,航时可达20 小时以上,无需中途加油,是一款军民两用平台无人机。
2 无人机总体设计
图1 平台无人机结构示意图

如图 1 所示,本平台无人机为前三点可收放式起落架。发动机置于机身后部,动力系统附件及管路置于后机身,油箱置于机身中部。电池、电气控制盒、自驾仪等设备布置于机身设备舱内。光电载荷舱位于机身前部,卫通设备布置于机身上,机身前舱盖为玻纤透波材质。机身上部布置多个舱盖,便于设备安装和检测。机翼后缘内侧布置开缝式襟翼、外侧布置副翼,襟翼舵机、副翼舵机均位于舵面附近,通过摇臂-连杆与舵面相连,机翼左、右翼尖处布置航行灯。
该无人机平台设计巡航飞行速度为 200km/⋅ 小时,属于低速飞机,基于翼展尺寸约束,选用自然层流翼型。机身采用非圆截面,机头部分向下收于底部平面,减小了机身阻力。机体材料主要选择碳纤维环氧树脂基复合材料、玻璃纤维环氧树脂基复合材料、航空铝合金。
平台无人机动力系统包括发动机、ECU、电启动器、发电机、排气管、螺旋桨、整流罩及其它附件。燃油系统包含油箱、燃油泵、燃油滤、调压阀、燃油管路等。燃油系统油箱为TPU 材质软囊式结构,内部设置防晃隔板,油箱通过固定扣与机身隔框和机身梁固定。油箱采用常压供油方式,在油箱顶部设置加注口和回油口,底部设置放泄口和出油口。
无人机平台由机体结构、动力系统、飞行控制系统、电气系统、测控系统、任务载荷等组成,如图2 所示。
图2 无人机平台系统组成

气动外形方面,无人机经过几十年的发展,从结构上,可将无人机分为固定翼无人机、旋翼无人机和扑翼无人机。相比之下,固定翼无人机拥有速度快、留空时间长、研究理论成熟等优点,应用最为广泛。在不同速度下机翼展弦比对无人机的气动性能有较大影响,低速飞行时,大展弦比的无人机有较好的升阻性能。如图1、3 所示,本无人机采用大展弦比、尾推式气动布局。
机翼为中单翼、梯形翼,尾翼采用“ V” 型构型;机身为细长型流线型机体,机身下部布置可收放前三点式起落架;动力系统布置在机身尾部。机身前部采用大舱盖设计,方便任务载荷在机身前部的安装以及重心配平,发动机后置为机身前方提供了良好的前向视野。机身后方背部布置了发动机冷却气流进气口,为发动机散热器提供冷却气流。
图3 无人机侧视图

无人机采用前三点可收放式起落架安装于机身上,前起落架安装结构与前机身主承力框连接,主起落架与后机身主承力框连接。如图 4 所示为主起落架结构示意图。
图4 主起落架结构示意图
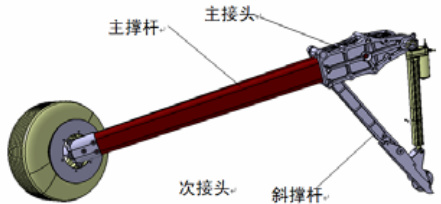
主起落架结构主要由主撑杆(复合材料结构)、斜撑杆(高强度钢结构)、主接头(高强度钢结构)、次接头(高强度钢结构)等组成。主起落架作为飞机关键组件(部件)研制中采用新的设计理念和方法,本飞机采用钢结构与高强度复合材料组合式的起落架形式,起落架重量减少 50% 以上。
图5 无人机机身结构示意图

机身结构如图 5 所示,由隔框、长桁(梁)、蒙皮等组成。蒙皮为复合材料结构;隔框中,普通框为复合材料结构,主承力框包括机翼对接框、尾翼对接框为高强度铝合金材质。
机身上部布置 4 个舱盖,便于设备安装和检测,机身下部布置了前起落架舱门,因主起落架较为细长,故取消主起落架舱门。机身前舱盖为玻纤透波材质。
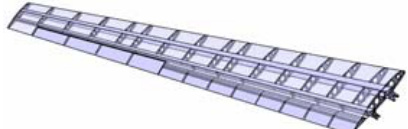
如图 6 所示,机翼结构由 2 根梁、若干翼肋、上下蒙皮等组成,均为复合材料结构。与机身主承力框通过对接接头使用螺栓连接,对接接头为高强度铝合金结构。
机翼后缘内侧布置开缝式襟翼、外侧布置副翼,襟翼舵机、副翼舵机均位于舵面附近,通过摇臂-连杆与舵面相连。
图6 无人机单侧机翼结构示意图
如图 7 所示,尾翼结构由 2 根梁、若干翼肋、上下蒙皮等组成,均为复合材料结构。与机身主承力框通过对接接头使用螺栓连接,对接接头为高强度铝合金结构。
图7 无人机单侧尾翼结构示意图3 平台无人机的应用探索
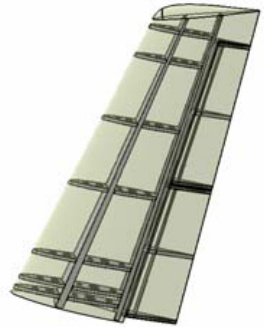
图8 无人机2024 年珠海航展图

沈阳首架“ 他机试飞” 中试验证平台无人机已于2024 年9 月总装下线,并在第十五届中国国际航空航天博览会(2024 年珠海航展)上惊艳亮相,吸引众多客户和军迷的热烈关注,并签订多项意向性订单。
无人机应用市场多用于以下18 个领域:
(1)测绘与地理信息、(2)军事与国防、(3)科研与教育、(4)通信与网络覆盖、(5)能源与基础设施、(6)建筑与工程、(7)灾害应急、(8)公共安全、(9)环保与治理、(10)农业精准化、(11)考古与文化遗产、(12)影视与媒体、(13)渔业与海洋、(14)气象与科研、(15)工业检测、(16)医疗与卫生、(17)科研实验、(18)物流与运输。
本文的“ 他机试飞” 平台无人机可开展量子导航、5G 蒙皮等多项新技术的中试验证,通过搭载高清摄像头和多光谱传感器,无人机可以对农田进行实时监测等领域;在安防与监控领域的应用包括城市巡逻、交通监控和突发事件监测;在建筑与工程领域,无人机用于施工前的地形测绘和工程规划,生成高精度的3D 模型和地形图;在医疗与救援领域的可快速运送医疗物资和进行搜索与救援;它能够搭载各种传感器和侦察设备对敌方目标进行远距离、高精度的侦察和监视为军事决策提供有力支持。
4 结论与展望
4.1 结论
沈阳首架“ 他机试飞” 中试验证平台无人机的研制,标志着沈阳在中大型无人机领域取得了新的突破,填补了相关领域的空白。该平台具有以下优势及特点:
4.1.1 技术成熟度与优势
⑴长航时与大范围覆盖:固定翼无人机凭借空气动力学效率优势,该 机巡航高度 3000m ,航时可达20 小时以上。
⑵高载荷能力:该机最大起飞重量约1100 公斤、任务载荷 300kg ,可搭载多光谱相机、合成孔径雷达(SAR)等重型设备,满足农业、军事等领域高精度数据采集需求。
⑶成本效益:在相同任务规模下,固定翼无人机的单位面积作业成本比载人飞机低 70% 以上(如电力巡检场景)。
⑷关键技术突破
自主导航与避障:基于 AI 的路径规划算法(如 PX4 Autopilot)支持复杂地形自主飞行,适应山区、城市楼群等环境。
轻量化材料:碳纤维复合材料的结构设计显著降低机身重量。
4.1.2 应用场景拓展
⑴中继通信节点:高空长航时(HALE)无人机可为偏远地区提供持续网络覆盖。
⑵量子导航:是一种不依赖于外部信息、也不向外部辐射能量的自主式导航系统,具有高隐蔽性、全时空间工作的优势,在国家安全等领域具有重要的应用价值。量子导航技术具有广阔的发展前景。
⑶环境监测网络化:多机协同构建大气污染、海洋生态的实时监测网络。
⑷5G 蒙皮:蒙皮天线罩,作为一种保护天线免受外部环境影响的结构,广泛应用于无线通信、航空航天等领域。它不仅能够保护天线免受风雨、尘土等自然环境的侵蚀,还能确保天线在各种恶劣环境下稳定工作。蒙皮天线罩通常由特殊材料制成,具有良好的透波性能和耐候性,确保信号传输不受阻碍。
4.2 展望
展望未来,随着无人机平台的搭建,应加速实现平台的各项功能性能指标,并开展相关科学试验与实验,以完善平台的完备性。不断的迭代优化平台内各功能区块的协调与发展,在2025 年完成试飞和功能试验,承接一定量的任务测试订单。
下一步,平台要加强在智能化与专业化方面的升级。一是提升全场景模拟测试能力,将集成更复杂的仿真环境(如城市楼宇、山地、海洋等),利用数字孪生技术构建高精度虚拟测试场,结合AI 算法模拟极端天气、电磁干扰、多机协同等场景,缩短实地验证周期。二是推进自主化与集群技术突破,针对无人机自主导航、避障、任务规划等核心能力,平台需提供动态障碍物测试、超视距通信验证等模块,并支持大规模集群协同算法的开发(如蜂群物流、灾害救援编队)。
综上,无人机中试平台不仅是技术落地的“ 试金石” ,更是产业升级的“ 催化剂” 。随着各国在低空经济领域的竞争加剧,中试平台的建设需以市场需求为导向,以技术突破为根基,以生态合作为支撑,最终推动无人机从“ 工具化” 向“ 系统化” “ 社会化” 演进,开启智能低空时代的新篇章。
参考文献
[1]丛书全,姜杨,陈剑涛.无人机产品研制阶段风险识别与控制[J].解放军92419 部队,2010.
[2]GB/T44717-2024 民用无人机可靠性飞行试验要求与方法.
[3]GBT44169-2024 民用大中型固定翼无人机系统自主能力飞行试验要求。
[4]艾洪昌.对我国民用无人机研制、销售、使用现状的思考[J].中国航空综合技术研究所,2015.
[5]秦平.贵州 H 公司民用无人机产品的市场拓展研究[M].贵州大学,2016.
[6]章胜,刘刚,周晓雨,黄江涛,朱喆.强风干扰下固定翼无人机"元飞行"气动建模研究[J].中国空气动力研究与发展中心空天技术研究所,2024.
[7]王振宇,郭骁,刘颖,高宏力,范校尉,刘学飞,冯熠硕.固定翼无人机动力系统匹配设计研究[J].中国航天电子技术研究院航天时代飞鸿技术有限公司,北京理工大学机械与车辆学院,2024.
[8]肖锦涛,谭先琳,苏良,覃武盟,伍扬.固定翼无人机的结构优化设计[J].广西大学,2023.
作者简介:孙奉道(1982—)硕士研究生,毕业于大连理工大学,高级工程师。沈阳市战略性新兴产业专家库专家、沈阳市数字经济高级专家库专家、沈阳市中级职称评审专家。
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)