.jpg)
SCARA机器人运动学分析及轨迹规划研究

张诚 邓三鹏
天津职业技术师范大学(机械工程学院) 天津市 300222
0 引言
工业机器人是一种能够自动定位控制、可重复编程的、多功能的、多自由度的设备,是能代替人工从事工业生产的智能化装备。相比于传统的工业设备,工业机器人有众多优势,并且已经成功应用于多个领域。工业机器人可以完成材料搬运、分拣、组装等作业,能提高生产效率[1-2]。近年来,工业机器人的运动学分析和轨迹规划已成为工业机器人研究的重要内容,并且很大程度上影响了机器人系统整体的基本性能[3]。
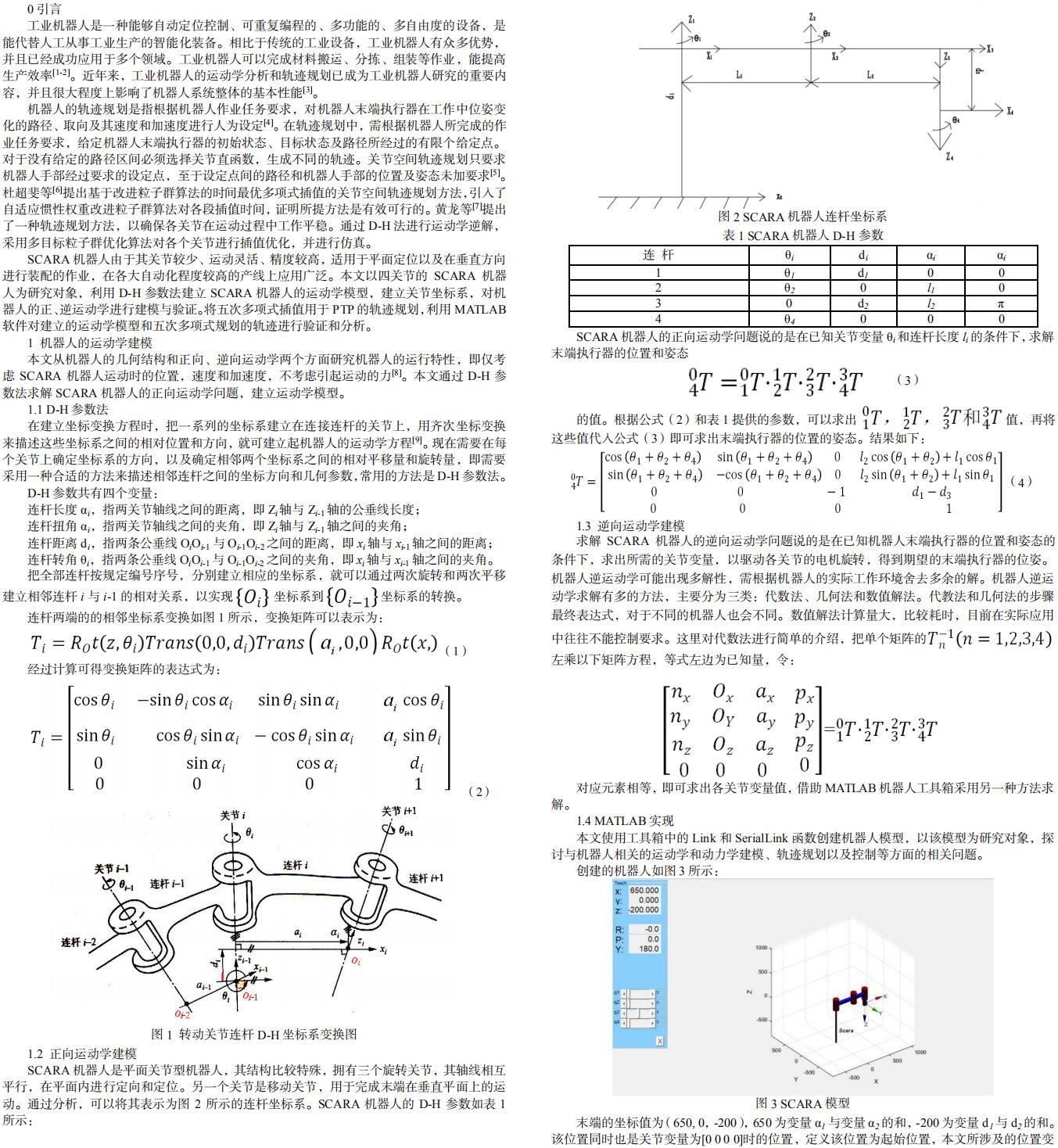
连杆两端的的相邻坐标系变换如图1 所示,变换矩阵可以表示为:

经过计算可得变换矩阵的表达式为:

1.2 正向运动学建模
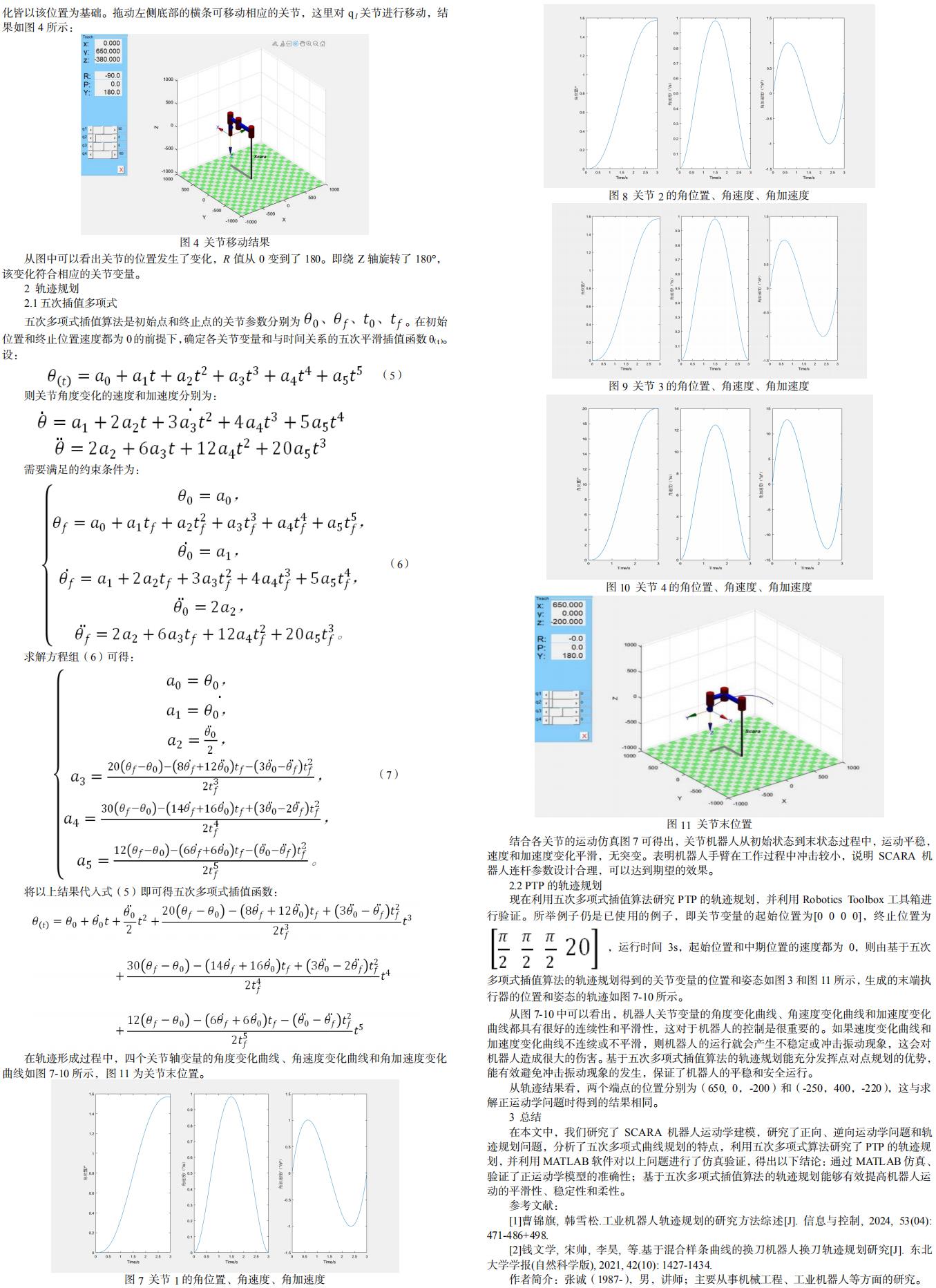
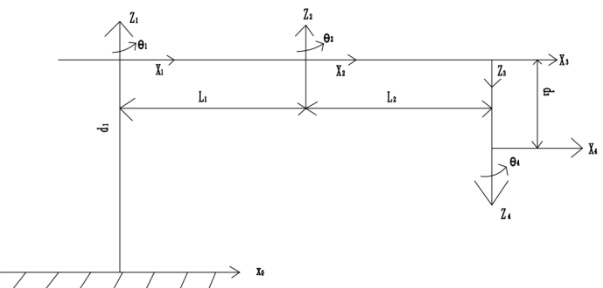
SCARA 机器人是平面关节型机器人,其结构比较特殊,拥有三个旋转关节,其轴线相互平行,在平面内进行定向和定位。另一个关节是移动关节,用于完成末端在垂直平面上的运动。通过分析,可以将其表示为图 2 所示的连杆坐标系。SCARA 机器人的 D-H 参数如表 1所示:

SCARA 机器人的正向运动学问题说的是在已知关节变量  和连杆长度
和连杆长度  的条件下,求解末端执行器的位置和姿态
的条件下,求解末端执行器的位置和姿态

的值。根据公式(2)和表1 提供的参数,可以求出 

 和
和  值,再将这些值代入公式(3)即可求出末端执行器的位置的姿态。结果如下:
值,再将这些值代入公式(3)即可求出末端执行器的位置的姿态。结果如下:

1.3 逆向运动学建模
求解 SCARA 机器人的逆向运动学问题说的是在已知机器人末端执行器的位置和姿态的条件下,求出所需的关节变量,以驱动各关节的电机旋转,得到期望的末端执行器的位姿。机器人逆运动学可能出现多解性,需根据机器人的实际工作环境舍去多余的解。机器人逆运动学求解有多的方法,主要分为三类:代数法、几何法和数值解法。代教法和几何法的步骤最终表达式,对于不同的机器人也会不同。数值解法计算量大,比较耗时,目前在实际应用中往往不能控制要求。这里对代数法进行简单的介绍,把单个矩阵的  左乘以下矩阵方程,等式左边为已知量,令:
左乘以下矩阵方程,等式左边为已知量,令:

对应元素相等,即可求出各关节变量值,借助MATLAB 机器人工具箱采用另一种方法求解。
1.4 MATLAB 实现
本文使用工具箱中的 Link 和 SerialLink 函数创建机器人模型,以该模型为研究对象,探讨与机器人相关的运动学和动力学建模、轨迹规划以及控制等方面的相关问题。
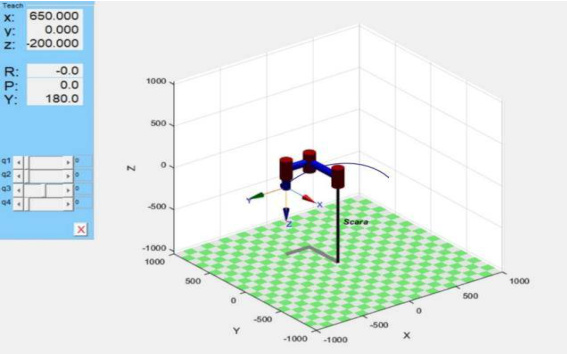
创建的机器人如图3 所示:
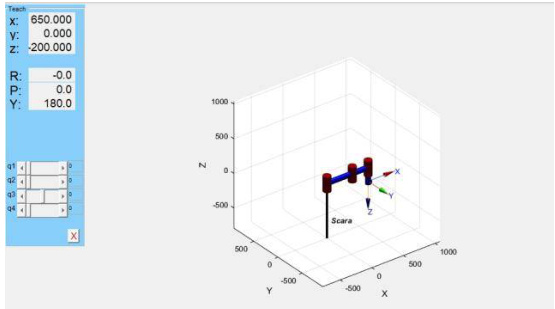
末端的坐标值为(650, 0,-200),650 为变量  与变量
与变量  的和,-200 为变量
的和,-200 为变量  与d2 的和。该位置同时也是关节变量为[0 0 0 0]时的位置,定义该位置为起始位置,本文所涉及的位置变
与d2 的和。该位置同时也是关节变量为[0 0 0 0]时的位置,定义该位置为起始位置,本文所涉及的位置变
化皆以该位置为基础。拖动左侧底部的横条可移动相应的关节,这里对  关节进行移动,结果如图4 所示:
关节进行移动,结果如图4 所示:
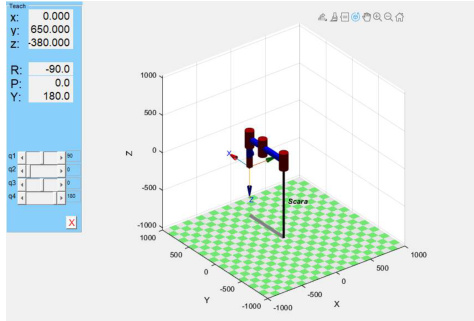
从图中可以看出关节的位置发生了变化,R 值从 0 变到了  。即绕 Z 轴旋转了
。即绕 Z 轴旋转了  ,该变化符合相应的关节变量。
,该变化符合相应的关节变量。
2 轨迹规划
2.1 五次插值多项式
五次多项式插值算法是初始点和终止点的关节参数分别为 


 。在初始位置和终止位置速度都为0 的前提下,确定各关节变量和与时间关系的五次平滑插值函数
。在初始位置和终止位置速度都为0 的前提下,确定各关节变量和与时间关系的五次平滑插值函数  设:
设:

则关节角度变化的速度和加速度分别为:

需要满足的约束条件为:

求解方程组(6)可得:

将以上结果代入式(5)即可得五次多项式插值函数:



在轨迹形成过程中,四个关节轴变量的角度变化曲线、角速度变化曲线和角加速度变化曲线如图7-10 所示,图11 为关节末位置。
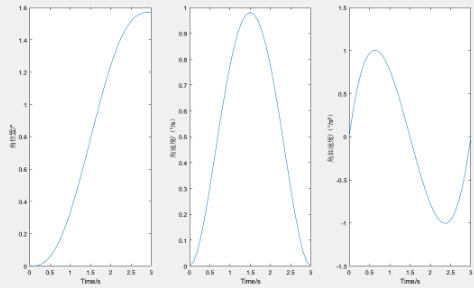
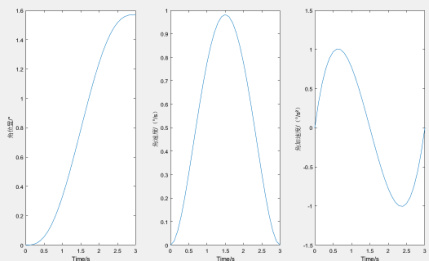
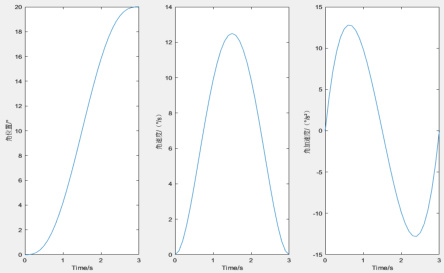
结合各关节的运动仿真图7 可得出,关节机器人从初始状态到末状态过程中,运动平稳,速度和加速度变化平滑,无突变。表明机器人手臂在工作过程中冲击较小,说明 SCARA 机器人连杆参数设计合理,可以达到期望的效果。
2.2 PTP 的轨迹规划
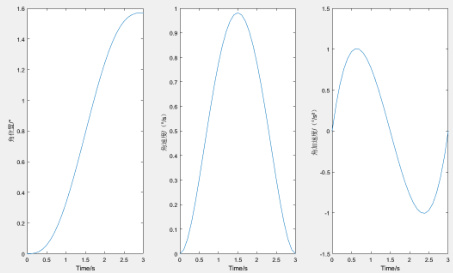
现在利用五次多项式插值算法研究 PTP 的轨迹规划,并利用 Robotics Toolbox 工具箱进行验证。所举例子仍是已使用的例子,即关节变量的起始位置为[0 0 0 0],终止位置为 多项式插值算法的轨迹规划得到的关节变量的位置和姿态如图3 和图 11 所示,生成的末端执行器的位置和姿态的轨迹如图7-10 所示。
多项式插值算法的轨迹规划得到的关节变量的位置和姿态如图3 和图 11 所示,生成的末端执行器的位置和姿态的轨迹如图7-10 所示。
从图7-10 中可以看出,机器人关节变量的角度变化曲线、角速度变化曲线和加速度变化曲线都具有很好的连续性和平滑性,这对于机器人的控制是很重要的。如果速度变化曲线和加速度变化曲线不连续或不平滑,则机器人的运行就会产生不稳定或冲击振动现象,这会对机器人造成很大的伤害。基于五次多项式插值算法的轨迹规划能充分发挥点对点规划的优势,能有效避免冲击振动现象的发生,保证了机器人的平稳和安全运行。
从轨迹结果看,两个端点的位置分别为(650, 0,-200)和(-250,400,-220),这与求解正运动学问题时得到的结果相同。
3 总结
在本文中,我们研究了 SCARA 机器人运动学建模,研究了正向、逆向运动学问题和轨迹规划问题,分析了五次多项式曲线规划的特点,利用五次多项式算法研究了 PTP 的轨迹规划,并利用MATLAB 软件对以上问题进行了仿真验证,得出以下结论:通过 MATLAB 仿真、验证了正运动学模型的准确性;基于五次多项式插值算法的轨迹规划能够有效提高机器人运动的平滑性、稳定性和柔性。
参考文献:
[1]曹锦旗, 韩雪松.工业机器人轨迹规划的研究方法综述[J]. 信息与控制, 2024, 53(04):471-486+498.
[2]钱文学, 宋帅, 李昊, 等.基于混合样条曲线的换刀机器人换刀轨迹规划研究[J]. 东北大学学报(自然科学版), 2021, 42(10): 1427-1434.
作者简介:张诚(1987-),男,讲师;主要从事机械工程、工业机器人等方面的研究。
.jpg)
.jpg)
.jpg)
.jpg)