.jpg)
基于 PI 控制器的太阳能追日系统的设计与仿真

岳萍 孙培硕
成都工业学院 四川省成都市 611731;成都工业学院 四川省成都市 611731
中图分类号:TP391.9 文献标志码:A
引言
随着可持续新能源的发展,国家对光伏等新能源的重视提升到了新的高度[1]。但由于目前大部分的光伏系统属于固定系统,不能随太阳位置的持续变化而改变角度,从而使得太阳能板垂直接收到光照的时间有限,太阳能的利用率很低。如何提高光伏系统的太阳能利用率,则成为我们要考虑的一个重要问题。本设计通过对太阳能追日系统进行建模,采用 PI 控制器对其随太阳位置变化而进行角度控制,延长太阳光直射太阳能板的时间,从而达到提高太阳能利用率的目的[2][3][4]。
1 太阳能追日系统的建模
太阳能追日系统可以分为两个部分,如图 1 所示,一部分为太阳能电池板部分,第二部分为带动太阳能电池板旋转的电机部分。下面分别对这两部分进行建模。
1.1 太阳能电池板
太阳能电池板的转动属于机械旋转运动,根据牛顿第二定律[5] [6],则有下式成立:

1.2 电机部分
电机部分的建模根据基尔霍夫定律:给定电压减去反电动势减去内阻电压等于电感电压[7][8]:

T=KgKti
至此,太阳能追日系统的数学模型建立完成。
2 太阳能追日系统仿真模型
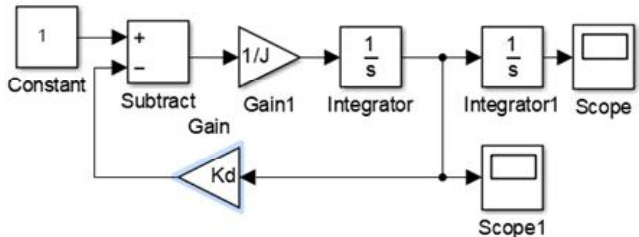
将太阳能电池板旋转部分的数学模型(1)整理后,在 Matlab 仿真软件的Simulink 模块中建立仿真模型[9]如图 1 所示:
图1 太阳能板仿真模型
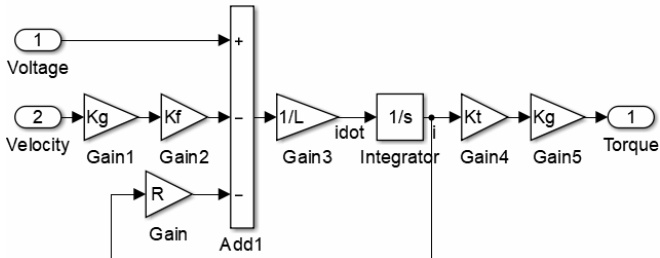
同理,可以根据(2)式建构电机的仿真模型,如图 2 所示:
图2 电机仿真模型
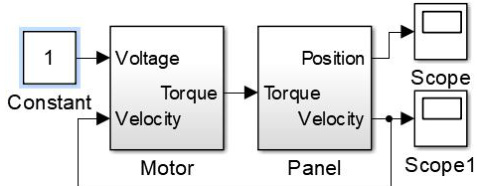
将图1 和图 2 两个图连到一起,并进行封装,得到太阳能追日系统总仿真模型,如图 3 所示:
给该系统输入一个单位阶跃输入后可以看出,虽然系统输出可以跟随输入的变化而变化,但系统的调节时间太长,大概在 700s 左右,不满足太阳能追日系统对实时性的要求。要想对其进行改进,则可以通过增加控制器的方式进行设计
[7][8]。
3 PI 控制器
本案中,要提高太阳能的利用率,就需要太阳能追日系统具有较好的快速性和准确性,实现的方法是将比例和积分两种控制结合起来,构成比例积分(PI)控制器,既解决了快速性问题,又消除了系统静差,满足了准确性的要求。
调节适当的PI 参数后,可以得到看到系统的阶跃响应曲线系统在6s 左右基本达到稳定,系统的快速性和准确性较之前到了很大的提升。
图3 太阳能追日系统仿真模型
4 结论
本文通过对普通太阳能追日系统添加 PI 控制器的方法,来提升系统追日的快速性和准确性。首先对普通太阳能追日系统进行了建模仿真,然后为该系统添加了 PI 控制器,分别分析了在没有 PI 控制器下的追日系统的性能和添加了 PI控制器的系统性能,可以提高太阳对太阳能板的直射时间,从而大大提高太阳能的利用率。
参考文献
[1]国际电工委员会.IEC 61511-1~3 Functional Safety-Safety instrumented systems for the process industry sector[S]. Geneve: Bureau Central de la Commission Electro-technique International. 2017.
International Electrotechnical Commission. IEC 61511-1 ~ 3 Functional Safety-Safety instrumented systems for the process industry sector[S]. Geneve: Bureau Central de la Commission Electro-technique International. 2017.
[2]何燕阳.太阳能电池板追日自动跟踪方案的研究[J].蚌埠学院学报,2015, 4(6):1⁃5. He Yanyang. Research on solar panel tracking system[J].Journal of Bengbu College, 2015, 4(6):1-5.
[3]赵永鑫.基于单片机的光伏追日系统设计[J].现代电子技术,2021,44:125. Zhao Yongxin. The design of solar tracking system based on single-chip microcomputer [ J ] . Modern Electronics, 2021,44:125.
[4]王瑜,傅明星.太阳能光伏追踪控制系统的研究[J].机械工程与自动化, 2015(5):159-161. Wang Yu, Fu Mingxing. Research on photovoltaics tracking control system [ J ] . Mechanical Engineering and automation, 2015(5) : 159-161.
[5]陈巧玲.工科大学物理(上册)[M].北京:清华大学出版社,2021 Chen Qiaoling. University of Engineering Physics (Volume I)[M ] . Beijing: Tsinghua University Press, 2021
[6]陈信义.大学物理教程(第 3 版)[M].北京:清华大学出版社,2021 Chen Xinyi. College Physics (3rd edition)[M] . Beijing: Tsinghua University Press, 2021
[7]汤天浩.电机与拖动基础[M].机械工业出版社,2022,9-10 Tang Tianhao. Motor and drag foundation [M] . China Machine Press, September 10,2022
[8]刘锦波.电机与拖动(第 2 版)[M].北京:清华大学出版社,2015 Liu Jinbo. Motor and drag (2nd edition)[M] . Beijing: Tsinghua University Press, 2015
.jpg)
.jpg)
.jpg)
.jpg)