.jpg)
基于多模块决策与货格分级检测的智能分拣机器人系统设计

秦瑶 邢旭东 刘礼容 李志昂
山东商业职业技术学院 山东济南 250103
1 引言
随着智能制造与自动化的深度推进,物流行业作为供应链核心环节,其效率与成本控制直接影响企业竞争力。山东某公司作为物流第三方物流企业,聚焦快消、电商等细分行业,提供仓配一体化供应链服务。但其现有分拣系统存在三大核心痛点:一是货物适配难,物流机器人感知精度不足;二是动态规划缺陷,临时退货导致新旧货品混放,仓库空间利用率下降 25% ;三是异常处置成本高,标签缺失、尺寸超限等异常件需 100% 人工介入。因此,具备多模态感知[1]、智能分级分拣与自主异常处理能力的分拣机器人系统,对解决行业痛点、提升物流自动化水平具有重要现实意义。
2 智能分拣机器人系统总体设计
系统采用“感知-决策-执行-监控”四层架构,以多模块决策模型为核心,整合多模态感知设备、货物分级引擎与数字孪生监控平台,实现“货物识别-尺寸分级-货格匹配-抓取分拣-异常处置”的全流程自动化,架构分为以下几层:
1.感知层:由视觉设备、力觉传感器、激光雷达、RFID 读写器组成,采集货物图像、重量、空间位置及标签信息。
2.决策层:基于 AI 算法融合多源感知数据,完成货物分级、货格匹配与路径规划。
3.执行层:包括机械臂与自动导引小车,执行货物抓取、搬运与分拣动作。
4.监控层:依托数字孪生平台,实时可视化系统运行状态,触发异常告警与人工复核提示。
3 系统核心技术模块
3.1 多模态感知升级
为解决现有系统感知精度不足的问题,设计多模态感知模型,融合图像、力觉与标签信息,实现货物精准定位与状态识别。
1.视觉感知:采用 3D 工业摄像头采集货物三维轮廓与颜色信息,通过神经网络完成货物类别识别与尺寸测量,预处理阶段通过图像去噪[2]、边缘检测与轮廓提取,减少光照、遮挡对识别结果的影响。
2.力觉感知:在机械臂末端安装六维力传感器,实时监测抓取力与力矩,当抓取力超过阈值时触发保护机制,避免货物夹损,同时提升机械臂承重能力。
3.激光雷达:用于仓储空间三维建模与 AGV 路径规划,扫描仓库通道宽度、货格位置及障碍物分布,精度达 ±2cm ,为货格优化与路径避障提供数据支撑。
4.RFID 感知:通过预埋在货架与地面的 RFID 标签,辅助 AGV 定位,同时读取货物标签信息,验证货物类别与存储要求,如防潮、易碎,避免标签缺失导致的识别模糊。
3.2 货物尺寸分级规则
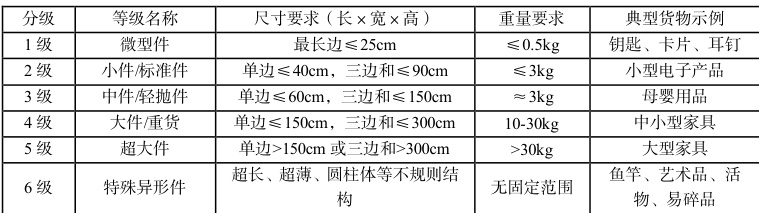
针对电商货物形态差异大的问题,构建支持自定义配置的 6 级分级体系,覆盖从微型件到特殊异形件的全品类货物,分级标准如表 1 所示:
表 1 货格分级规则
3.3 异常处理机制针对识别模糊与尺寸超限两类核心异常,设计“自动识别-智能响应-人工复核”的闭环处理流程,降低人工介入成本。
3.3.1 异常触发条件识别模糊:RFID 标签读取无效;
尺寸超限:货物长、宽、高任一维度超过分拣设备标准尺寸,或体积超过货格承载上限。
3.3.2 异常响应流程
1.数字孪生标记:异常触发后,数字孪生系统在虚拟模型中以黄色闪烁图标高亮标记异常货物,并自动生成唯一异常 ID,关联货物实时位置、采集时间、异常类型等信息。
2.可视化提示:监控大屏的孪生界面弹窗显示异常货物位置与详情。
3.终端通知:通过管理系统向现场管理人员手机推送复核任务,包含异常货物导航路径与操作指南。
4.暂存区引导:AGV 自动将异常货物搬运至暂存区,避免堵塞正常分拣通道,待人工复核后重新进入分拣流程。
5.通过该机制,异常件人工介入率从 100%降至 30% 以下,单票异常处置成本降低 60% ,显著提升分拣效率。
3.4 数字孪生技术的集成应用
数字孪生技术作为系统监控与决策的核心支撑,实现“实时可视化-动态感知-路径优化”三大功能:
3.4.1 实时可视化监控
1.三维视窗:360°实时显示机器人的动作轨迹,支持缩放与视角切换;
2.数据仪表盘:展示关键指标,包括分拣效率、匹配准确率、异常件数量、
3.状态可视化:以颜色标识货柜容积饱和度,便于管理人员实时调整存储策略。
3.4.2 动态感知与定位:
结合 SLAM 技术与 RFID 地标定位,实现 AGV 运行环境的动态感知。SLAM 通过激光雷达实时扫描障碍物并更新地图,RFID 标签提供高精度位置校准,确保 AGV 在复杂仓库环境中的避障能力与路径准确性;
3.4.3 路径规划最优解:
数字孪生系统根据货物分拣任务与实时交通状况,通过 Dijkstra 算法生成最优路径,兼顾效率与能耗。测试表明,路径规划效率提升 15% ,AGV 能耗降低 10% 。
4 结论
本文设计的智能分拣机器人系统,通过多模态感知模型解决了货物定位精度不足的问题,依托 6级货物分级提升了货格匹配效率与空间利用率,结合数字孪生技术实现了异常处置与路径规划的智能化。系统满足企业的核心需求,匹配准确率≥ 90% ,分拣效率与空间利用率显著提升,异常处置成本大幅降低,为物流行业自动化分拣提供了切实可行的解决方案。
5 参考文献
[1]毛江红,聂小春,朱洪雷.多模态传感器在机器人中的研究与进展[J].科技与创新, 2025(12).
[2]许莉,张玉雪,范纯龙,等.融合图像去噪和特征对齐的目标检测算法[J].计算机工程与设计, 2025,46(2):392-398.
[3]张璇 王利强.RFID 技术在智能仓储系统中的应用综述[J].2024.
作者简介:秦瑶,1995.03,女,汉族,工程师,山东昌乐,硕士研究生,研究方向:智能控制与机器人。
邢旭东,1971.04,男,汉族,副教授,硕士研究生,研究方向:经济管理。
刘礼容,1987.11,女,汉族,讲师,硕士研究生,研究方向:现代物流管理。
李志昂,1992.01,男,汉族,山东滕州,助理讲师,硕士研究生,研究方向:思想政治教育、嵌入式系统。
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)