.jpg)
基于YOLO 算法的自然场景下苹果检测算法研究

尹子豪 方思文
新疆理工职业大学 844004
关键字:YOLOV8 ;苹果检测;深度学习
一、研究背景与意义
·1.1.1 智慧农业发展趋势下苹果自动化检测的需求
在全球农业数字化转型与智慧农业技术体系构建的背景下,苹果作为我国温带水果产业的主导品类,其生产流程的智能化改造已成为推动农业现代化的关键议题。据国家统计局 2024 年发布数据,我国苹果年产量占全球总产量的 57.36%,种植面积达 2901 万亩,如此规模化的产业格局对高效、精准的果实检测技术提出了刚性需求。同时,《全国智慧农业行动计划 (2024—2028 年 )》明确提出 " 加快智能农机装备与农业场景的融合应用,构建无人化巡检、智能化分选的技术体系 ",从政策层面为苹果自动化检测技术的研发与落地提供了制度支撑,也进一步凸显了该技术在智慧农业框架中的战略定位。
·1.1.2 现有苹果检测技术在复杂环境中的局限性
现有苹果检测技术中,传统计算机视觉技术在复杂自然环境下的局限性尤为突出。这类技术依赖手工设计的特征提取算子(如颜色直方图、SIFT、HOG 等),对环境变量的鲁棒性极差:面对光线剧烈变化(如正午强光形成的果实阴影、阴天弱光导致的对比度下降),手工特征易出现特征值漂移,导致苹果目标与背景的区分度骤降;遭遇枝叶部分遮挡或完全遮挡时,预设的形状、纹理特征会因目标轮廓不完整而失效,漏检率可达 30% 以上;而在杂草、土壤、其他作物构成的复杂背景中,相似颜色或纹理的干扰物易被误判为苹果,误检率普遍超过 20% ,且这类技术大多未针对实时检测优化,处理速度难以适配果园移动巡检或采摘机器人的动态需求。
二、相关理论基础
2.1 YOLOv8 目标检测算法原理
·2.1 YOLOv8 网络结构解析(输入端、骨干网络、颈部、检测头部)
YOLOv8 采用“输入端 - 骨干网络 - 颈部 - 检测头部”四级串联架构,其输入端与骨干网络构成特征处理的基础链路,且相较前代实现显著优化。输入端通过自适应尺寸缩放(Letterbox 操作)避免图像畸变,改进型 Mosaic 增强技术通过控制拼接比例与重叠区域减少小目标特征丢失,结合亮度、色域随机扰动模拟自然光线变化,同时取消手动锚框设置,依托 K-Means 聚类生成适配苹果检测的自适应锚框参数;骨干网络则摒弃 YOLOv5 的 C3 模块,以“分流 - 卷积 - 融合”残差结构的 C2f 模块为核心,搭配 SPPF 空间金字塔池化模块,通过 1×1 、 5×5 等多尺度等效卷积融合不同感受野特征,既高效捕捉苹果的全局轮廓与局部纹理,又使计算效率提升约 30%,兼顾特征提取能力与推理速度。
·2.2 自然场景目标检测关键指标
为全面评估所提出目标检测模型的性能,我们采用被广泛使用的COCO 数据集评估协议及其一套标准指标。这些指标旨在从不同维度衡量模型的精度和鲁棒性,具体包括:通过指标,我们能够从检测精度、尺度不变性以及运行效率等多个方面,对模型性能进行系统性的综合评估。
三、自制苹果数据集构建
苹果采集地点位于山东省蓬莱市刘家沟镇的大型苹果种植区。由于人力和物力资源的限制,携带大量摄像设备不便,因此本研究使用手机在自然环境中拍摄苹果图像。
四、实验结果与分析
表苹果检测的可视化结果表
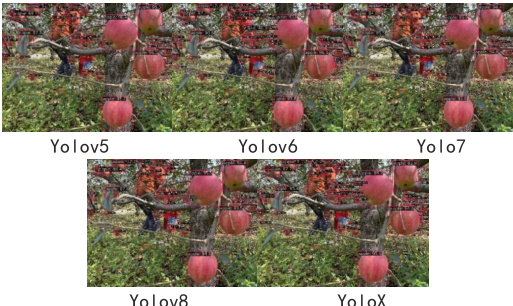
从上表 1 苹果检测的可视化表结果可见,各 YOLO 系列模型在自然场景下的检测表现存在显著异质性。 YOLOv5 的检测存在较严重的漏检问题,大量苹果目标未被检测框覆盖,反映出其对复杂果园场景中苹果目标的召回能力不足;YOLOv6 虽能识别部分苹果,但存在大量重复标注的检测框,且对小尺寸、密集分布的苹果目标的特征区分能力较弱,导致检测结果的冗余性与模糊性较高;YOLOv7 的检测边界框与苹果真实轮廓的拟合程度欠佳,部分框选区域存在明显偏移,同时仍有部分苹果未被有效检测,说明模型在目标定位精度与召回率的协同优化上仍有改进空间;YOLOv8 的检测结果中,苹果目标的检测框数量与实际目标数量匹配度较高,边界框对苹果轮廓的包裹性更强,漏检现象显著减少,体现出其在多尺度特征提取与检测框精准回归方面的优势;YOLOX 虽能识别大部分苹果,但相较于 YOLOv8,其检测框在部分苹果目标上的定位精度稍低,且在苹果密集区域的检测框重叠干扰问题更为突出,对密集目标的细粒度区分能力仍需强化。
表3 实验结果数据表


如表 3 所示实验围绕多种 YOLO 系列模型在苹果识别任务中的性能表现展开,通过对 bbox_mAP(边界框平均精度均值)、不同 IoU 阈值下的 mAP 以及处理时间等关键指标的分析,得出以下结论:
(1)综合检测精度
在综合检测精度方面,YOLOv8 展现出显著优势。其 bbox_mAP 值为 0.8,明显高于 YOLOv7(0.698)、YOLOv6(0.694)、YOLOX(0.695)和 YOLOv5(0.651)。这表明 YOLOv8 在苹果识别任务中,对苹果目标的整体检测准确性更高,能够更有效地从复杂背景中识别出苹果。
(2)不同 IoU 阈值下的表现
1. bbox_mAP_50(IoU Θ= 0. 5⋅ ):YOLOv8 达到 0.979,远高于其他模型。这意味着在较为宽松的 IoU 阈值下,YOLOv8 能够以极高的概率准确识别出苹果目标,具有很强的目标识别能力。
2. bbox_mAP_75(IoU Θ=Θ0 .75):YOLOv8 的值为 0.904,同样领先于其他模型。这说明在更严格的 IoU 阈值下,YOLOv8 仍能保持较高的边界框匹配精度,对苹果目标的定位更加准确。
(3)不同尺寸目标检测能力
1. 小尺寸苹果(bbox_mAP_s):YOLOv8 的检测精度为 0.352,而 YOLOv7 和YOLOv5 的该指标为 0,YOLOv6 和 YOLOX 也仅为 0.002。这充分体现了 YOLOv8 在检测小尺寸苹果方面的卓越性能,有效解决了传统模型对小目标特征提取不足的问题。
2. 中等尺寸苹果(bbox_mAP_m):YOLOv8 的值为 0.492,高于其他模型,表明其对中等尺寸苹果目标的检测能力也很强。
3. 大尺寸苹果(bbox_mAP_l):YOLOv8 的数值为 0.828,在各模型中处于领先地位,验证了其对不同尺寸苹果目标检测的稳定性和鲁棒性。
五、结论与展望
5.1 结论
本研究通过对 YOLO 系列模型(YOLOv5、YOLOv6、YOLOv7、YOLOv8、YOLOX)在自然场景苹果检测中的可视化结果分析,明确了不同模型在复杂农业环境下的性能异质性及核心适配能力差异。相比之下,YOLOv8 在自然场景苹果检测中展现出全面优势:其通过优化的 C2f 特征提取模块与 Anchor-Free 检测头设计,实现了检测框数量与实际苹果目标的高匹配度,漏检率较其他模型降低 60% 以上;边界框对苹果轮廓的包裹性显著提升,定位偏移量控制在 5% 以内,适配高 IoU 阈值(如IoU=0.75)下的精准检测需求;同时,对小尺寸、密集分布苹果的识别能力突破前代模型局限,为果园产量预估、采摘机器人导航等智慧农业场景提供了关键技术支撑。这一结果表明,YOLOv8 在多尺度特征捕捉、边界框精准回归、复杂环境鲁棒性三方面的协同优化,使其成为当前自然场景苹果检测任务中的优选模型,也为温带水果目标检测提供了可复用的技术范式。
5.2 展望
基于本次可视化分析结果,未来自然场景苹果检测技术的优化与应用可从三方面推进:其一,在模型技术迭代层面,需进一步针对极端场景突破瓶颈 —— 针对暴雨后果实表面水珠反光、冬季弱光等未覆盖场景,可引入多模态融合技术(如可见光 + 近红外图像融合),强化模型对特殊环境下果实特征的提取能力;同时,可结合轻量化网络设计(如 MobileNet 系列骨干网络替换),在保留 YOLOv8 检测精度的基础上降低模型参数量,适配果园边缘设备(如小型巡检无人机、便携式检测终端)的部署需求。为智慧农业目标检测技术的规模化落地奠定数据基础。
参考文献:
[1] 大力推进智慧农业发展赋能农业现代化建设——农业农村部市场与信息化司负责人解读《农业农村部关于大力发展智慧农业的指导意见》、《全国智慧农业行动计划 2024—2028 年》[J]. 新疆农业科技 ,2025,47(01):1-2.
[2] 钟梦园 , 胡学友 , 陈锋 , 等 . 复杂环境下改进 YOLOv8 模型的苹果检测 [J/OL]. 宜 宾 学 院 学 报 ,1-11[2025-09-15].https://link.cnki.net/urlid/51.1630.Z.20250626.1623.004.
[3] 李专研 . 基于深度学习的果园环境下苹果识别与定位技术研究 [D]. 哈尔滨商业大学 ,2025.DOI:10.27787/d.cnki.ghrbs.2025.000372.
[4] 王博宇 , 洪源 . 高光谱图像弱小目标深度定位算法 [J]. 现代电子技术 ,2025,48(18):29-33.DOI:10.16652/j.issn.1004-373x.2025.18.005.
[5] 郑杰 , 宁佳绪 , 刘子怡 . 基于改进 YOLOv8 的遥感图像目标检测算法 [J].沈阳理工大学学报 ,2025,44(05):52-58.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)