.jpg)
基于北斗导航的拖拉机自动驾驶辅助系统设计与试验研究

程小宁 杨楠 刘印增 张生璨 赵彤 鲁炜
甘肃省农业信息中心 甘肃省兰州市 730000 山东农业工程学院 山东省淄博市 255300
. 引言
. 研究背景
随着城市化进程加速,我国农业劳动力老龄化与短缺问题日益突出,尤其在临夏回族自治州等传统农业区域,人工成本攀升与作业效率低下成为制约农业高质量发展的瓶颈 []。拖拉机作为农业生产的核心装备,其作业精度与稳定性高度依赖驾驶员经验,易受地形、气候等因素影响,导致土地利用率降低与资源浪费[3]。
北斗卫星导航系统(BDS)的成熟为农业智能化提供了契机,其厘米级定位能力可实现农机精准作业[4]。然而,丘陵地区信号遮挡严重,单一导航系统难以满足作业需求。因此,融合北斗与惯性导航技术,研发高鲁棒性的拖拉机自动驾驶系统具有重要现实意义。
1.2 国内外研究现状
“北斗 + 惯导”组合导航方面,国内外研究聚焦于通过紧组合及多源信息融合,采用卡尔曼滤波等优化算法应对丘陵环境下信号遮挡与多路径挑 [5],保障定位的连续性与可靠性。在分层控制架构方面,将全局路径规划、局部动态避障和底层运动控制相解耦是主流技术路线,以提升规划与控制精度;当前研究热点是引入人工智能优化决策效率 [6]。
本文创新点在于:(1)构建“北斗 + 惯导”组合导航系统,提升丘陵环境定位稳定性;(2)设计分层控制架构,优化路径规划与执行精度。
2. 方法
2.1 系统总体设计
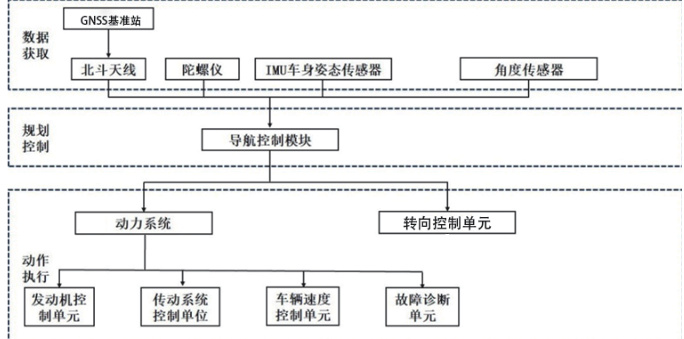
拖拉机自动驾驶辅助系统由硬件平台与软件控制系统组成,采用“感知 - 决策 - 执行”三层架构,如图1 所示。硬件平台包括拖拉机、北斗天线、IMU 车身姿态传感器、电动方向盘等;软件系统通过 CAN 总线实现数据交互,集成路径规划、转向控制等模块。
图1 软件控制系统结构
2.2 硬件系统设计
2.2.1 核心组件选型
(1)定位单元:采用华策P2 北斗接收机,水平定位精度0 .01m+10- ⁸RMS,支持 RTK 差分;
(2)姿态感知:IMU 传感器集成三轴加速度计与陀螺仪,添加地形补偿算法,适应 ±30∘ 坡
(3)驱动单元:大扭矩直流电机驱动方向盘,响应时间 ⩽0 .5s,转向角度范围 ±35∘ ;
(4)控制终端:车载智能终端内置4G 模块,工作温度  ,支持航线规划与数据存储。2.2.2CAN 通信协议
,支持航线规划与数据存储。2.2.2CAN 通信协议
系统通过 CAN 总线实现多模块协同,定义 5 类控制消息(表 1)。例如,转向线控模块采用 ID0x18F00500,传输转向角度(分辨率 0.1∘ )与速度 (0-100∘ /s);机具线控模块通过 ID0x18F00600 控制覆膜机起降,确保作业同步性。
2.3 软件系统设计
2.3.1 组合导航算法
采用卡尔曼滤波融合北斗与惯导数据:
(1)状态方程:基于拖拉机运动学模型,建立位置、速度与姿态的状态向
(2)观测方程:以北斗定位结果为观测量,修正惯导漂移误差;
(3)滤波周期:100ms,实现厘米级定位与 0.1m/s 速度测量精度。
2.3.2 路径规划与控制
(1)路径规划:采用蚁群算法优化作业行调度,目标函数为最小转弯距离。通过信息素更新机制(式1)迭代生成最优路径序列:

其中, ρ 为挥发因子,取值为0.1-0.5, Δτijk τikj 为第k 只蚂蚁留下的信息素。
(2)横向控制:基于纯追踪模型计算期望转向角,通过 PID 控制器调节电动方向盘,比例系数kp=0.8 ,积分系数 ki=0.05 ,微分系数 kd=0.1 。
2.4 试验设计
试验地点为甘肃省临夏州康乐县基地,土壤类型为黄绵土,起伏坡度为5-15°。测试指标包括:(1)通过北斗定位记录实际轨迹与规划路径的横向偏差;计算平均作业速度与标准差,速度稳定性;对比直线/ 转弯阶段转速波动。
3. 结果与分析
3.1 横向偏差对比
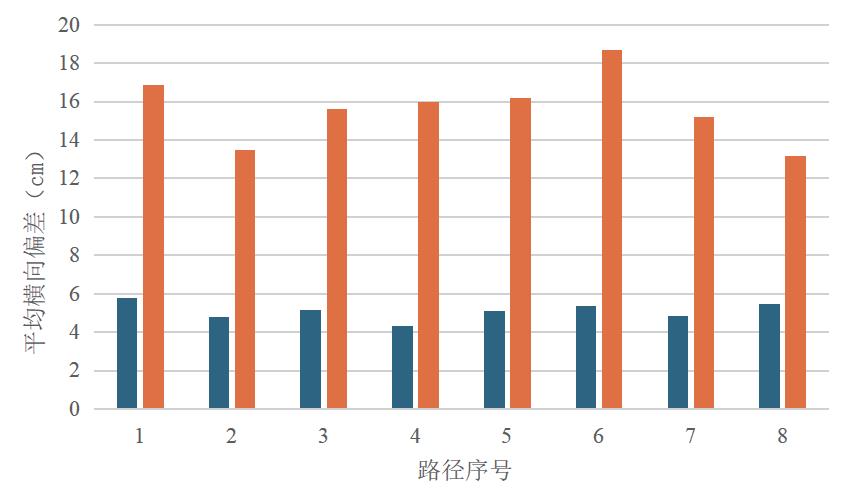
图 2 中显示了两种驾驶方式八种路径的横向偏差,其中蓝色表示自动驾驶,橘黄色表示人工驾驶。自动驾驶系统在 8 条路径中的平均横向偏差为 5.1cm,最大偏差 5. 77cm ;人工驾驶平均偏差 15.31cm,最大18.67cm(表2)。表明系统有效降低了地形干扰导致的轨迹偏移,满足覆膜作业误差≤10cm 的精度要求。
3.2 转速分析
为了分析两种驾驶方式的动力控制性能,表 1 分别对比了直线作业和转弯作业时发动机的转速标准差。试验数据表明直线作业时,自动驾驶的平均转速标准差为 8. 84r/min ,显著低于人工驾驶的 89. 6r/min ,转弯作业时自动驾驶时发动机转速标准差为 12. 79r/min ,人工驾驶时发动机转速标准差为 81.91r/min,这说明自动驾驶时的动力输出更稳定。
表1 不同作业时发动机转速标准差对比

3.3 丘陵适应性验证
在倾斜角度为 15°的坡地测试中,组合导航算法使定位中断时长 ⩽2s ,单一北斗系统的定位中断时间为8-15s,证明惯导有效补偿了信号遮挡问题。
4 讨论与结论
与现有的技术相比,本系统的创新性如下:
1)本研究的硬件为模块化设计,可以与多种型号的拖拉机(2)该控制方式融合了多种算法,提升复杂地形定位的可靠性;
(3)使用一群算法优化路径,能够减少在地头转弯时的无效距离。
本文设计的基于北斗导航的拖拉机自动驾驶 硬件集成和智能算法,实现了在丘陵、山地的精准作业。试验研究表明,自动驾驶系统在 发动机速度输出稳定,适应能力强,这为农业机械化、智能化及高效作业提供了可行性方案 步优化在高倾斜角度的坡度地形工作的准确的控制策略和可靠性。
参考文献:
[1] 赵颖文 , 吕火明 , 何鹏 , 等 . 四川“十四五”农业农村发展成效、现实挑战及“十五五”高质量发展路径选择 [J/OL]. 农业展望 ,1-11[2025-07-27].
[2] 程勇刚. 中国式现代化的生产方式侧面研究[D]. 江西财经大学,2025
[3] 周子铭, 杨维诚. 高标准农田建设助力农民持续增收:理论逻辑与实践路径[J]. 南京农业大学学( 社会科学版 ),2025,25(04):176-188.
[4] 徐纪洋 . 基于北斗导航无人驾驶的氢能源驱动多功能四驱四转设施农业机器人底盘设计与实现 [J]农业开发与装备 ,2025,(07):49-51.
[5] 徐善文 , 曾庆化 , 李方东 , 等 . 无人集群系统协同导航资源及算法综述 [J]. 导航与控,2024,23(Z1):25-37.
[6] 何文. 基于动态场景重构的自动驾驶汽车纵横耦合规划与控制研究[D]. 电子科技大学,2025.
基金项目: 临夏州农机自动驾驶系统应用示范推广(编号22CX8NA057)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)