.jpg)
基于柔性电子技术的智能鞋垫系统设计

夏亦枫 王靖伟 杨成博 肖爽
武汉商学院 湖北武汉 430056
引言
随着“健康中国 2030”战略深入实施,运动健康监测领域快速增长。足底动力学参数作为评估运动表现和损伤风险的核心指标,其精准采集对竞技体育科学训练及大众健康管理意义重大[1]。
当前主流监测设备分两类:实验室级测力台(如 Kistler 系统)精度高,但体积大、成本高,难以满足日常训练需求;商用可穿戴鞋垫(如Pedar、F-Scan)轻量化、便携,却受传统刚性电路设计限制,反复弯折 5 万次后断路率达37% ,且续航不足 2 小时[2]。
柔性电子技术为解决上述问题提供了新路径。采用可延展导电材料(如银纳米线、液态金属)和应力优化结构的柔性电路,可承受 >10 万次弯折[3]。但现有研究仍面临两大挑战:
1. 机械可靠性矛盾:柔性基底(如 PDMS)的弹性模量与电路导电性负相关,弯曲半径 <5mm 时,铜导线电阻增幅超 200%14 ,大幅降低系统可靠性;
2. 多源数据异步:压力传感器与IMU 采样率差异大引发时间戳错位,最大同步误差达 15ms[5] ,严重影响步态相位判断。
1 系统设计
本系统由关联的软硬件两部分组成。硬件负责收集处理压力传感器与姿态传感器的实时数据,并通过蓝牙模块搭建与电脑、手机等控制装置的通讯路径;软件则汇总经初步处理的实时数据,借助蓝牙协议传输至控制设备,经高性能处理器转化为可视化图形,供其他学者研究分析。
1.1 硬件架构设计
1.1.1 电源模块
电源模块是整个电路的基础,负责为电路各组件提供稳定电压。本设计中,电源模块采用 5V 电池供电,通过 ME6211 稳压芯片将电压稳定在 3.3V,满足主控芯片及其他组件的电压需求。同时,模块配备 0.1uF、1uF 和 100nF 的滤波电容,用于滤除电源噪声,保证电源的稳定性与纯净度。
1.1.2 主控芯片
主控芯片是电路的大脑,负责数据处理与系统控制。本设计选用STM32F103C8T6,这是一款基于 ARM Cortex-M3 内核的微控制器,其丰富的外设接口和强大的处理能力可满足设计需求。芯片引脚配置如图所示,包括电源、复位、时钟引脚及多个 I/O 引脚,分别连接电源模块、复位电路、时钟电路和其他外设模块。
1.1.3 压力传感器
压力传感器是采集压力数据的关键组件。本设计中电路采用多个压力传感器,每个通过电阻连接主控芯片的模拟输入引脚,用于采集不同位置的压力数据并传输给主控芯片处理。传感器输出信号经运算放大器放大后,可被主控芯片更准确地读取。
1.1.4 蓝牙通信模块
蓝牙通信模块用于与上位机无线通信,通过串行通信接口连接主控芯片,负责发送处理后的数据并接收上位机控制指令。借助该模块,智能鞋垫可便捷地与手机等设备交换数据,实现远程监控与控制。
1.1.5 IMU660RA 姿态传感器模块
IMU660RA 姿态传感器模块是智能鞋垫的关键组件,用于采集加速度、角速度和磁场等姿态信息。作为高性能六轴传感器,其精确的姿态数据对智能鞋垫功能实现至关重要。该模块通过 I2C 接口连接主控芯片,供其读取并处理分析数据。
2 算法设计
2.1 多源数据同步机制
在步态分析系统中,不同传感器的采样率差异会影响数据融合精度。本研究中,压力传感器采样率为 100Hz ,惯性测量单元(IMU)则达 200Hz ,这种不匹配导致数据时间基准不一致,进而影响步态分析精度。为此,系统设计了硬件与软件协同的同步方案,以实现不同传感器数据的时间对齐。
2.1.1 硬件同步机制
硬件同步机制通过精确的定时器触发实现:系统采用 TIM3 定时器,以100Hz 频率触发模数转换器(ADC)同步采样,确保 5 路压力信号采集时间偏差小于 100 微秒。该机制以 TIM3 定时器为时间基准,核心是保证压力传感器数据同步采集,最大误差控制在 ±0.1 毫秒以内,仅占用1 个定时器通道资源。
2.1.2 软件对齐策略
对于 IMU 数据,因其采样率较高且采样时间不均匀,难以通过硬件同步实现对齐。系统采用软件对齐策略,通过线性插值重构将其采样频率调整至与压力传感器一致的 100Hz⨀ 。线性插值是一种简单有效的数据重构方法,可根据已知数据点计算中间数据点的值,具体计算公式如下:

其中, Pi 和 Pi+1 分别为相邻的两个IMU 数据点, ⋅∣ti 和 Δti+1 为它们的采样时间,t 为需要插值的时间点。通过这种插值方法,可以将 IMU 数据的时间基准与压力传感器数据对齐。
实际测试显示,该软件对齐策略可将最大时间误差控制在 5 毫秒以内,完全满足步态相位分析的精度要求。此策略以软件重构序列为时间基准,适用于IMU 数据,最大误差5 毫秒,对CPU 负载要求小于 3% 。
2.1.3 同步性能对比
为直观展示不同同步方式的性能差异,表 1 详细对比了硬件触发同步与软件对齐同步的性能指标。由表可见,硬件触发同步精度更优,但仅适用于压力传感器数据;软件对齐同步适用于 IMU 数据,且资源消耗较为合理。
表 1 同步方式性能对比

2.2 步态分析算法设计
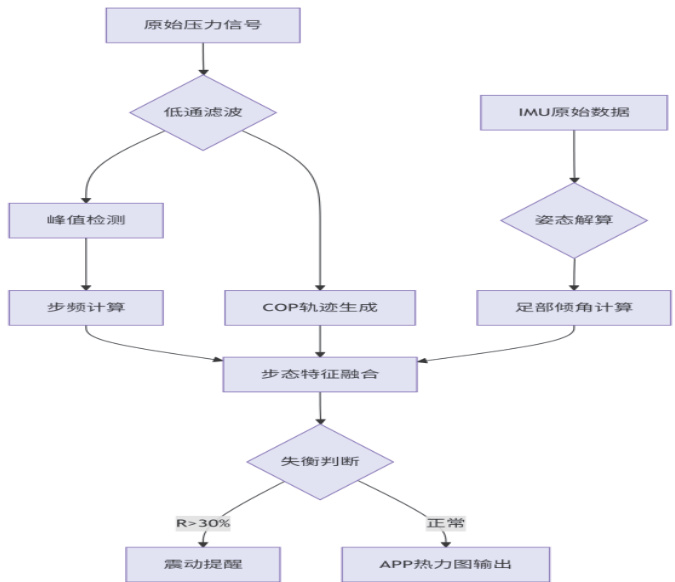
步态分析是本研究的核心环节,其目的是通过提取步态特征来评估步态状态并提供相应的反馈。本节详细介绍了步态分析算法的设计过程,包括步态特征提取流程、数据处理流程以及性能指标评估。
2.2.1 步态特征提取流程
步态特征提取是步态分析的基础,其目的是从原始传感器数据中提取出有意义的步态特征。本研究中,步态特征提取主要包括步频检测、压力中心(COP)轨迹计算以及失衡预警机制。
2.2.2 步频检测
步频是步态分析的重要参数,反映行走节奏。本研究采用 4 阶 Butterworth低通滤波器预处理压力信号,其频率选择性良好,可有效去除高频噪声并保留低频信号特征,截止频率 15Hz ,能覆盖正常行走和跑步时的压力信号变化;预处理后通过识别相邻峰值间隔时间 Δt 计算步频,步频 >3Hz 时启用自适应窗口动态调整阈值,窗口宽度 0.5/f(f 为步频),可随步频变化自动调整窗口大小以提高检测精度。
2.2.3 压力中心(COP)轨迹
压力中心(COP)轨迹是步态分析的另一重要特征,反映足底压力的分布与变化。其计算基于五点压力值,通过实时计算质心位置实现,具体计算公式如下:

其中,P_i 为第 i 个压力传感器的测量值,(x_i,y_i) 为该传感器的坐标位置。为提高 COP 轨迹平滑性,本研究采用 Savitzky-Golay 滤波器处理。该滤波器基于多项式拟合,能在保留信号特征的同时去除噪声,窗口宽度设为7 个数据点,可有效平滑轨迹且避免过度平滑导致的信号失真。
2.2.4 失衡预警机制
失衡预警机制是步态分析的重要功能,旨在通过实时监测步态状态预防跌倒。本研究中,该机制通过实时计算左右侧压力比R 实现:当R 超过 30% 且持续时间超 2 秒时,触发鞋垫震动提醒。提醒强度与压力偏差值正相关,可根据失衡程度提供不同提醒,以提高用户警觉性。
2.2.5 数据处理流程
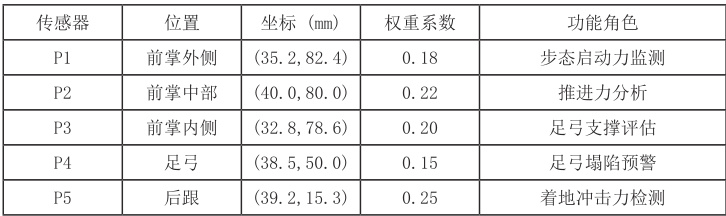
传感器布局参数如表 2 所示,每个传感器的位置、坐标、权重系数以及功能角色均进行了详细标注。传感器的合理布局是步态分析的基础,通过优化传感器的位置和权重系数,能够提高步态特征提取的精度。
表 2 传感器布局参数
2.2.6 步态分析性能指标
为了评估步态分析算法的性能,本研究从多个方面进行了性能指标评估。具体数据见表3 :
表 3 步态性能分析指标

图 1 综合流程图
3 实验验证
3.1 静态标定测试
3.1.1 压力传感器标定
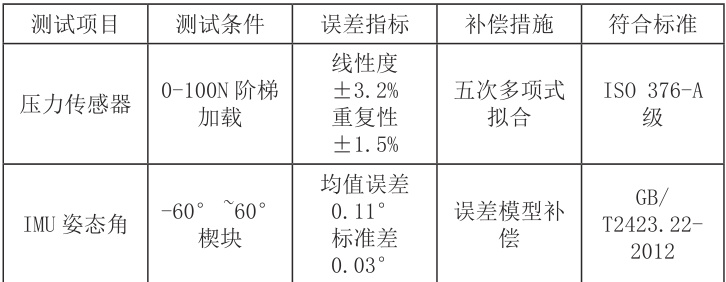
为确保压力传感器的准确性,采用 Instron 3367 材料试验机进行标定:施加0-100N 轴向载荷,步长 10N,经精确实验收集数据后,用五次多项式拟合得到标定曲线。这一过程(见图 1)既保证了数据准确性,也为后续性能测试奠定可靠基础。关键指标为:线性度误差小于 ±3.2% ,迟滞误差小于 1.8% ,表明传感器线性特性和稳定性良好,可为本动态测试提供准确数据支持。
3.1.2 IMU 姿态角验证
为验证惯性测量单元(IMU)的准确性,将其固定在 20∘ -60∘ 的 5 种角度楔块上,每个角度采集 50 组数据以保证多样性和可靠性。采用最小二乘法拟合系统误差模型并补偿后,残差下降 62% ,证明误差补偿方法有效。测试结果如下表:
表 4 IMU 姿态测试
3.2 动态场景测试
3.2.1 测试方案设计
为全面评估系统性能,设计了动态场景测试方案:选取 20 名志愿者,分为专业组(10 名篮球队员)和普通组(10 名普通大学生),以模拟不同运动水平和身体条件的使用场景,确保测试结果的广泛适用性。
匀速跑:志愿者以 8km/h 的速度匀速跑动,持续5 分钟。
急停变向测试:志愿者进行 45∘ 切变动作,重复 20 次。
单脚站立平衡测试:志愿者分别进行睁眼和闭眼的单脚站立,各持续30 秒。
3.2.2 核心性能验证步频检测精度
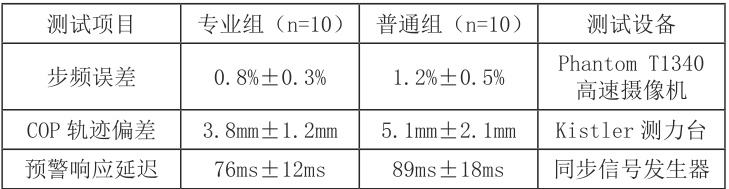
为验证系统步频检测精度,以 1000fps 的 Phantom T1340 高速摄像机为基准,通过记录志愿者运动过程精确计算实际步频,与系统测量值对比。系统误差公式为: ×100% 。测试显示,普通组最大误差 1.2% ,专业组 0.8% ,表明系统步频检测精度较高,能满足实际应用需求。
续航性能
系统续航性能是实际应用的重要指标,测试了两种工作模式的续航时间:
连续传输模式:采样率 100Hz ,同时进行BLE 实时传输,续航3.2 小时。
事件触发模式:压力大于5N 时唤醒系统,传输 20ms 数据,续航72 小时。3.2.3 动态测试数据
在动态测试中,我们收集了大量数据以评估系统的性能表现。关键数据为
表 5 测试数据
4 结论
本文针对现有运动健康监测设备的不足,设计了基于柔性电子技术的智能鞋垫系统,旨在精准采集足底动力学参数,助力竞技体育科学训练与大众健康管理。系统含硬件与软件:硬件包括电源模块、主控芯片、压力传感器、蓝牙通信模块及 IMU 姿态传感器模块,可实现数据采集、处理与传输;软件负责数据汇总、可视化与分析。针对多源数据同步难题,设计软硬件协同同步方案,有效解决采样率差异问题。步态分析算法涵盖步频检测、压力中心轨迹计算与失衡预警机制。实验验证,系统在步频检测精度、COP 轨迹偏差及预警响应延迟等核心性能指标上表现优异,续航性能出色,预警准确率高,具备良好应用前景。
参考文献:
[1] 林一凡等 . 基于智能鞋垫的足部数据可视化系统设计 [J]. 传感器与微系统 , 2024, 43(8):95-99.
[2] an A M, et al. Development of a smart insole for medical purposes[J]. Procedia Engineering, 2015, 112:152-156.
[3] 景元等 . 基于多传感器的智能鞋设计 [J]. 传感器与微系统 , 2019,38(4):100-103.
[4] ark S W, et al. Wearable capacitive pressure sensor for gait analysis[J]. Organic Electronics, 2018, 53:213-220.
[5] 谢珩等. 基于薄膜传感器的智能鞋垫设计[J]. 电子测量技术, 2018,41(21):119-122.
课题号:2025 年度大学生创新创业训练项目:基于柔性电子技术的智能鞋垫 202511654118
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)