.jpg)
无网络覆盖地区无人机航测作业方法探讨

张振鑫
中国葛洲坝集团电力有限责任公司设计研究院 湖北宜昌 443002
引言
无人机航测凭借其高效、灵活、低成本等优势,在地形测绘、资源勘查、环境监测等众多领域发挥着重要作用。在网络覆盖良好的区域,无人机航测能够借助实时网络差分等技术实现高精度定位与数据采集。但在些偏远山区、沙漠、海洋等无网络覆盖地区,传统依赖网络的航测作业模式难以实施,如何保障无人机在这些区域的高精度定位与稳定作业,成为亟待解决的问题。
1 无网络覆盖地区无人机航测难点
1.1 定位精度问题
在有网络覆盖时,无人机常利用网络实时动态差分(RTK)技术获取高精度定位,通过参考站与流动站之间的实时信号传输,消除卫星信号的误差,实现厘米级定位。但在无网络区域,无法接收实时差分改正信息,仅依靠无人机自身的全球导航卫星系统(GNSS)接收机,受卫星信号传播延迟、电离层和对流层干扰等因素影响,定位精度通常只能达到米级,难以满足高精度航测要求。
1.2 数据传输与控制难题
无人机与遥控器之间的通信依赖无线传输链路,无网络覆盖地区往往地形复杂,如山区的遮挡、沙漠的电磁环境干扰等,易导致信号衰减、中断,使作业人员无法实时获取无人机的工作状态、位置、姿态、电池电量等关键信息。
1.3 作业规划与协同困难
无网络覆盖地区缺乏准确的地理信息数据与实时通信手段,难以提前进行精准的航测作业规划。作业过程中,若有多架无人机协同作业或需要与其他地面测量设备配合,由于无法实时共享位置与任务进度信息,容易出现飞行冲突、测量区域遗漏或重叠不合理等问题。
2 架设GNSS 基准站作业方法
2.1 系统组成与原理
该作业方法主要由GNSS 基准站、无人机遥控器和机载GNSS 接收机组成。GNSS 基准站通常设置在测区附近已知坐标的稳定控制点上,能够连续跟 踪观测卫星信号,并实时计算出卫星信号的各种误差改正信息。通过遥控器将这些误差改正信息发送给机载 GNSS 接收机,机载 GNSS 接收机结合自身接收到的卫星信号和来自基准站的改正信息,进行差分定位计算,从而实现高精度定位。
2.2 作业流程
基准站选址与架设:选择视野开阔、地势较高、远离电磁干扰源(如高压线、通信基站)且地质稳定的位置作为基准站站点。将GNSS 基准站安装在三脚架上并精确对中整平。
基准站参数设置:为基准站设置正确的坐标系统、信号发射频率、卫星截止高度角等参数。
无人机设置与连接:在无人机遥控器中,连接基准站的无线网络,并设置与基准站匹配的差分数据接收参数,包括接入点、端口等。
航测作业执行:按照预先规划的航线,操控无人机进行航测作业。在飞行过程中,实时监控无人机的定位精度、飞行姿态和电池电量等参数。
数据后处理:航测任务完成后,将无人机采集的影像数据导入专业的航测数据处理软件,进行影像拼接、空中三角测量等处理,生成高精度的正射影像图、三维模型等成果。
3 架设 GNSS 静态站作业
3.1 系统组成与原理
此方法利用 GNSS 静态站架设在测区附 坐标的稳定控制点上采集静态观测数据。无人机在关闭 RTK功能的状态下执行航线任务,静态站 内业处理时,使用专业的数据后处理软件对静态观测数据进行解算,得到无人机在各个拍照时刻的准确位置和姿态(POS)数据,然后将其写入给相应照片,替换原始位置和姿态(POS)数据,用于后续的影像数据处理。
3.2 作业流程
静态站布设:根据测区的范围、地形复杂程度和精度要求,合理选择 GNSS 静态站的架设位置。为保证数据质量,一般要求静态站架站点相距测区不大于15 公里,而且站点要满足视野开阔、卫星信号接收良好的条件。
静态数据采集:在选定的已知控制点上架设GNSS 静态站,量取仪器架设高度、设置好采样间隔等参数后,开始观测卫星信号。静态观测时间应当大于航测作业时间,并且在航测作业开始前及结束后有至少各 20 分钟的多余观测时间。
数据传输与存储:观测结束后,将航测数据以及静态观测数据通过数据传输设备(如移动硬盘、无线传输模块)传输至数据处理工作站。
静态数据解算:利用专业的静态数据处理软件(如 UAV-PPK、Emlid-Studio 软件等),对采集到的静态观测数据进行解算。
POS 数据生成与赋值:根据解算得到的静态站坐标,结合无人机的飞行姿态信息,通过特定的算法得到每张航测照片对应的POS 数据。
航测数据处理:将带有 POS 数据的航测影像数据导入航测数据处理软件,进行影像匹配、空中三角测量、正射纠正等处理,生成最终的航测成果产品。
4 工程案例对比分析
4.1 案例背景
某山区风电工程建设项目,需要对约 48 平方公里的无网络覆盖区域进行高精度地形图测绘,测区宽度约3 公里,长度约 16 公里,近似带状。业主提供 5 个控制点,分别位于测区四角及中央,呈“X”形分布。项目采用无人机航测技术,并分别尝试了架设GNSS 基准站和GNSS 静态站两种作业方法。
4.2 作业过程与结果
GNSS 基准站作业模式:基准站模式的作业区域为以基准站为中心半径约1.5-2 公里的范围。航测作业前我们在卫星地图软件上进行模拟,选定了 2 个位置通过卫星定位测量的方式引测加密控制点,并在测区内均匀布设检查点 20 个。使用大疆 Matrice350RTK 搭配禅思 ZENMUSE P1 进行约 28 架次的飞行作业,耗时 9 天完成外业工作。空中三角测量计算及模型重建等内业工作耗时 3 天,总耗时 12 天。模型重建完成后,我们对检查点进行了精度验证,结果如下表所示:
GNSS 基准站作业模式检查点精度统计表(米)
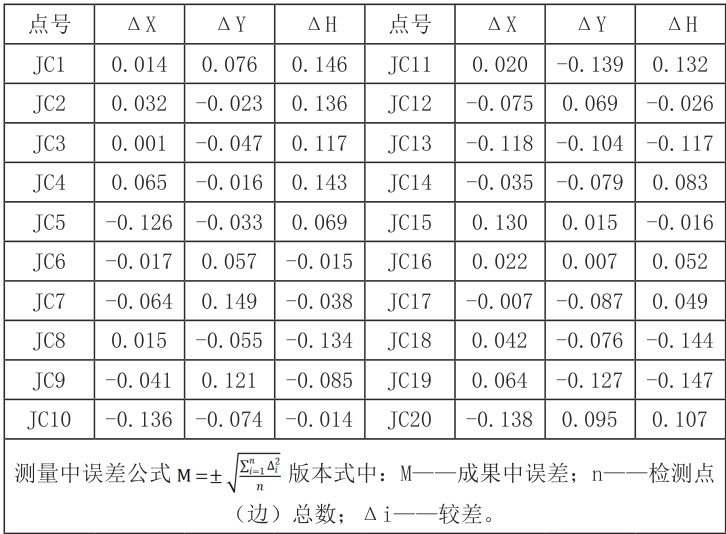
根据上式进行计算:平面位置中误差 MΔXY=0. 111 ;高程中误差MΔH=0.101
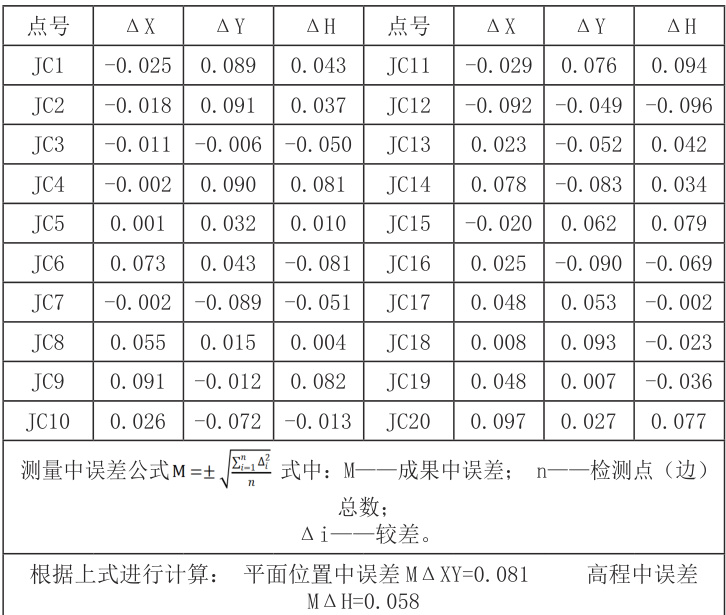
GNSS 静态站作业模式:在测区内任意控制点架设静态站采集数据,使用大疆 Matrice350RTK 搭配禅思ZENMUSE P1 进行约 22 架次的飞行作业,耗时 5 天完成外业工作。静态数据解算、空中三角测量计算及模型重建等内业工作耗时 4 天,沿用的检查点暂估布设时间约 1 天,预计总耗时 10 天。模型重建完成后,我们同样对检查点进行了精度验证,结果如下表所示:
GNSS 静态站作业模式检查点精度统计表(米)
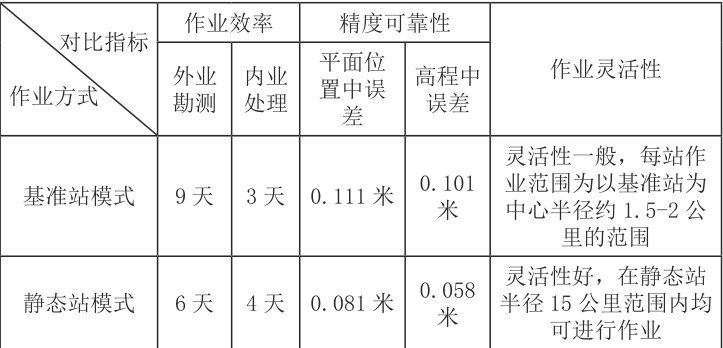
4.3 优劣势对比
5 结语
在无网络覆盖地区进行无人机航测,架设 GNSS 基准站和 GNSS 静态站是两种有效的作业方法,它们的成果均能满足风电项目地形图测绘的精度要求。但是从详细的技术指标来看,静态站作业模式不论是从作业效率、精度可靠性及作业灵活性各方面的表现都要优于基准站作业模式。不过静态观测数据解算工作难度较大,并且其成果的准确性直接影响后续工作,需要由经验丰富的专业人员来操作。在实际工程应用中,应根据项目的具体情况,如精度要求、作业时间、测区范围和地形条件等因素,综合权衡选择合适的作业方法。同时,随着GNSS 技术、通信技术和无人机技术的不断发展,未来有望出现更高效、更可靠的无网络覆盖地区无人机航测解决方案,进一步推动无人机航测技术在复杂环境下的广泛应用。
参考文献:(References)
[1]郭世敏,朱大明,王凯.无人机航测项目实施中像控点布设方法探讨[J].价值工程,2016,(04):136-139
[2] 朱曙光 , 聂松广 , 郭玉珍 .GNSS-RTK 外业操作五步教学法 [J]. 内江科技,2018,(02):62-63.
[3] 张熙,黄丁发,冯威 基于 Internet 的移动 GNSS 基准站技术 [C]. 第三届中国卫星导航学术年会电子文集,2012.
[4] 张增场 .GNSS PPK 技术在城市地形图高程测量中的应用 [J]. 测绘技术装备,2023,(05): 61-65.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)