.jpg)
基于北斗导航的玉米喷雾机自动导航系统研究

程小宁 鲁炜 陈隆豪 刁宏伟 崔彬彬 杨楠
1. 甘肃省农业信息中心 甘肃省兰州市 7300002. 临夏州农机化技术推广站 甘肃省临夏市 7311003. 山东农业工程学院 山东省淄博市 255300
引言
1 研究背景
玉米作为粮食作物,其种植多为行距 0.5-0.6m 的人工林,传统喷雾依赖人工操作,存在效率低(0.3-0.5 亩/h)、喷施不均等问题[1]。随着劳动力成本上升,亟需自动化喷雾装备。
北斗导航技术的发展为精准喷施提供了可能,但玉米园行距窄、植株高大,对导航系统的路径跟踪精度与转向灵活性要求高[2]。因此,研发适用于玉米园的喷雾机自动导航系统具有重要价值。
2 研究现状
国内外针对田间喷雾导航的研究集中于大田作物,如基于 GPS 的果树喷雾机 [3],但针对玉米等农业林的研究较少。现有系统存在转向响应慢、跟踪偏差大(>0.2m)等问题,难以满足窄行距作业需求。
本文旨在设计一种适用于玉米园的自动导航系统,通过优化跟踪算法与转向控制,提升作业精度与效率。
2. 方法
2.1 系统总体设计
喷雾机自动导航系统由北斗定位、导航控制、转向执行与喷雾装置组成如图 1 所示
(1)定位单元:华策P2 接收机 + 北斗天线,提供厘米级定
(2)控制单元:西门子工控机,运行路径跟踪算法;
(3)转向系统:STM32 单片机控制变频电机,实现差速转向
(4)喷雾装置:8 喷头扇形喷雾,流量可调( 0-5L/min )。
(5)转向控制系统根据导航控制系统发送的预期转向角,实现喷雾机的动态转向控制
图1 玉米喷雾机自动导航系统结构图
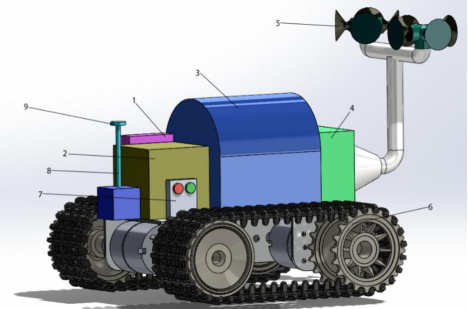
工控机2. 电源箱3. 药桶4. 高速风机5. 喷头6. 履带式自走平台7. 控制盒8. 车载天线9. 前置信号接收天线
2.2 关键技术
2.2.1 路径跟踪模型
纯路径跟踪模型是一种基于几何原理的路径跟踪算法,以履带式自走平台的当前位置和方向为起点,以路径点为终点,实现路径跟踪
基于几何原理,以点 A (xA,yA) 为起点,点 B 为终点,计算转弯半径 R 与期望航向角 θ⋅B :

通过控制左右履带速度差,使实际轨迹逼近规划路径。
2.2.2PID 转向控制
系统采用PID 控制算法对电机进行实时控制,大大缩短了电机的响应时间,从而提高了播种设备的精度。通过PID控制,系统可以快速准确地调节电机输出,保证播种过程中植株间距一致。
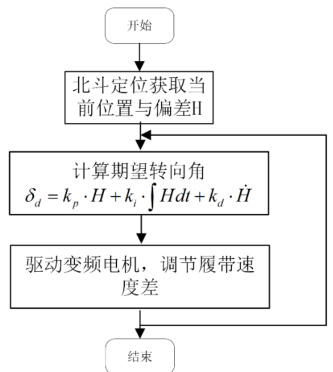
以跟踪偏差 H 为输入,转向角为输出,PID 参数设置为 k⋅P=2.5,ki=0.1 ,kd=0.5 。控制流程如图2 所示。
图2 控制流程图
2.3 试验设计
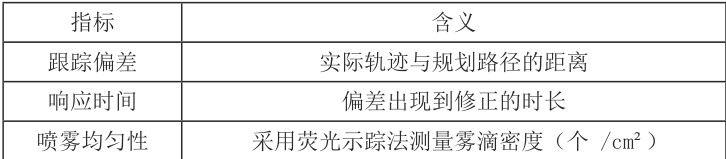
试验在临夏州玉米种植园进行,行距 0.6m ,株高 5-2m⨀ 。测试指标如表 1所示,
表1 测试指标
3 结果与分析
(1)跟踪精度
不同速度下的跟踪性能为,当 3km/h 时,最大偏差 0.16m ,平均 0.04m ,满足 H<0.2m 的安全要求。
(2)动态响应
阶跃响应测试显示,系统调整时间 ⩽5s ,超调量 <5% ,说明转向控制快速稳定。
(3)喷雾效果
与人工喷雾相比,自动导航喷雾的雾滴均匀性提升 30% ,农药利用率提高25% ,减少浪费 15-20L/ 亩。
4 结论
本文中提出的纯路径跟踪模型适配玉米园直角转弯需求;差速转向设计中最小转弯半径 0.4m ,避免了碰伤植株的风险;北斗 + 惯导融合方式在定位中断时仍可维持 10s 高精度跟踪。通过纯路径跟踪与 PID 控制的组合方式,实现了精准高效的喷雾工作。试验表明,系统在 3km/h 速度下跟踪精度高、响应快,适用于窄行距玉米园。推广应用可显著提升种植效益,助力特色农业现代化。
参考文献:
[1]辛咏恒. 宁夏林草生态产品价值实现问题研究[D]. 宁夏大学,2024.
[2]谢军,耿长江,聂欣,等.卫星导航系统完好性技术现状与发展趋势[J/OL]. 遥测遥控 ,1-10[2025-07-27].
[3]石志伟 . 基于 GPS 实地定位技术在玉米种植面积监测中的应用 [J]. 科技与创新 ,2015,(04):11
基金项目: 临夏州农机自动驾驶系统应用示范推广(编号22CX8NA057)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)