.jpg)
三维激光扫描技术在大型体育场馆曲面幕墙施工中的应用

冉进 郭育翔 程豪 彭涛 袁学文
中建八局西南公司 四川成都 610041
1工程概况
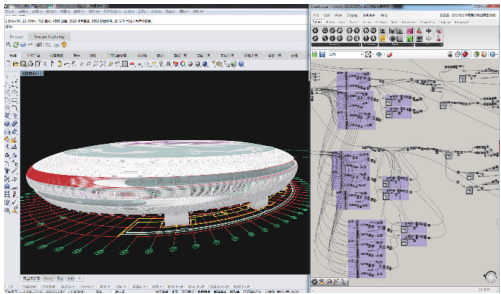
东安湖体育公园体育场建设以满足2021 年第31 届世界大学生运动会开展,将在大运会期间承担开闭幕式。项目总建筑面积12 万平方米,建筑高度50 米,可容纳观众 4 万人,用钢量达 1.4 万吨。体育场的特别之处还在于它的屋顶为一幅宽约46 米,总面积2.7 万平方米,代表悠久古蜀文化精髓的太阳神鸟图案。主体幕墙钢结构的曲面异形结构的施工安装借助于三维激光扫描技术的优势能有效得保障项目的质量及效率,减少返工率。
图1幕墙三维模型
2三维激光扫描系统的优势
2.1 传统测绘采集手段
传统的全站仪、水准仪测绘对钢结构场馆的测量只能反馈场馆局部情况,只能通过几个点来判断场馆的位置及形状情况。这种测量方式在精度上算是比较准的,但是采集的数据信息不全,且钢结构场馆及部分细节难以采集和还原,特别是曲线墙体给测量带来很大的难题;同时成果主要以二维平面矢量图为主,对现场数据还原的现时性,面向领导的辅助决策功能,以及面向设计者及业主的三维展示性都难以达到理想要求。
2.2 三维激光扫描技术的优势
随着现代科学技术的蓬勃发展,三维激光扫描技术被越来越多的应用于钢结构幕墙的数字化。与传统测绘手段相比,三维激光扫描技术具有以下几种优势:
1)高精度。三维激光扫描仪在现场数据记录及建模还原方面有着其他技术难以企及的高精度和高还原性,并且高精度数据可用于快速全面采集现场数据,极大地提高效率。
2)数据的完备性。通过对周围的全方位扫描,可以获取周边环境所有的点位信息以及被测物体表面的反射强度和颜色信息,生成三维的彩色点云,即可将周围环境数字化,存储在电脑中。
3)数据采集的实时性。可以通过简单地设站扫描得到房屋设施的所有三维信息,长距离的扫描半径也能保证它在采集大场景信息时毫不逊色。强大的自动拼接功能保证在外业现场快速得到所需场景的三维情况。
4)强大的数据后处理能力。三维激光扫描技术得到周边环境的大量点云数据,可以基于这种点云数据进行许多具有实际生产价值的分析和应用:后期基于点云生成建筑、结构的平立剖面图;进行快速建模生成幕墙本身及周边建筑的高精度真实尺寸的三维模型,进行三维平台的展示和分析。
3三维扫描原理
高速旋转的反光镜将激光发射器发射出的激光点向四周以 97600 点 / 秒的速度发射,由于光速极其快,光点在碰到障碍物后会立即返回到扫描仪,扫描仪可以通过计算发射和返回的时间差来确定每一个点的位置,并将所有点组合在一起,形成整个空间的点云文件。
不同测量站点的数据拼接组合类似于用手机拍摄全景照片时,手机可以自动找到两张照片中相同的部分,并将它们重叠组合。三维扫描仪配套的软件也可以找到两个空间中三个以上共同的标靶球,或者标靶纸来将两个相邻空间的点云拼接在一起。
三维扫描可以将施工现场建筑构件的立体信息转换为计算机能直接处理的数字信号,为施工现场数字化提供了相当方便快捷的手段。它可以将 Revit 模型直接导入三维扫描仪配套的软件中进行与点云模型的三维比对,并生成检测报告,用以指导调整土建模型,使其准确还原现场实际尺寸,让之后建立的装饰模型有更准确的参照,可以极大地提高装饰模型的实用性,使其可以更好地指导现场施工。
4三维激光扫描在幕墙施工中的应用
4.1 基础数据采集
4.1.1 扫描规划
在扫描之前需要进行扫描规划,根据所需扫描建筑物的面积大小和复杂程度,设置架站位置,如果需要扫描物体的绝对坐标,还需要利用全站仪或 GNSS接收机等测量设备,在现场采集相应控制点,进行坐标转换。本次摆站方案根据大运会场馆环境为了更全面地采集点云数据,采用交叉密集型摆设,根据轴网特征,外围从 1—88 号中间开始,依次每隔 2 个轴网摆设一站,这样摆站一圈可架设45站;中围从1-2号开始,依次每隔2个轴网摆设一站,同样架站45站;
并且呈依次交叉状线路规划,场馆内部则增设均匀覆盖摆站。
4.1.2 扫描实施
实地的扫描按照规划方案进行,依次扫描幕墙结构的各个部分,做到整体幕墙信息全覆盖,方便后期处理。根据现场条件采取合适的拼接方式,做到效率和精确兼得。本项目使用的徕卡 P40 扫描仪,可以架站已知点,支持无标靶拼接,能够大大提高外业作业效率。每站采用 30m@10m 的分辨率进行扫描作业,每站耗时约10 分钟。
4.2 三维激光扫描数据处理
4.2.1 点云拼接
点云数据处理时,坐标纠正是最主要的数据处理之一,由于目标物的复杂性,通常需要从不同的方位扫描多个测站,才能把目标物扫描完整,每一测站扫描的数据都有自己的坐标系,三维模型的重建及数据分析要求把不同测站的扫描数据纠正到统一的坐标系统下,这个过程称作“点云拼接”。目前的点云方式主要有标靶拼接,特征点拼接,已知点拼接,点云拼接这几种。本次项目精度要求较高,为了最大化提高点云数据的精确性,这里采用标靶拼接,点云拼接和已知点拼接三种方式混合拼接。
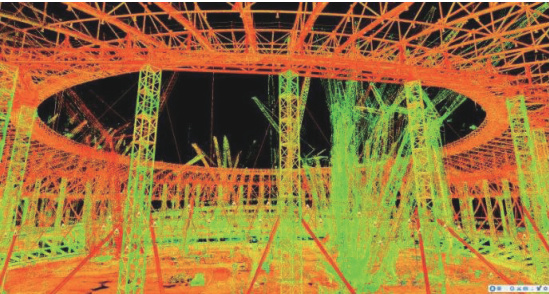
我们先采用内拼接,将点云数据拼接到自定义的相对坐标中。为了提高点云精度,再采用了站站连续拼接,站内复核拼接的方式进行拼接。
图3 拼接完整的建筑点云图
4.2.2 噪声去除
原始点云数据中包含大量的噪声,噪声来源有多种,如远远大于扫描设定范围的物点;不属于研究物体本身的其它物体的点;由于外界环境,如周围震动的影响使得获取的数据不能表示真实的研究物体;此外,由于激光光束的离散度,使得一个发射光束可能接收到不同物体返回的反射光束而产生噪声,这种噪声在物体边缘十分明显。
5结论
三维激光扫描技术是目前国内比较先进的测量技术,在众多方面已经得到了广泛的应用,在本次幕墙施工测量中的应用取得了成功,为今后提高幕墙的施工测量精度和改进幕墙的测量方法奠定了基础。
参考文献:
[1] 李璐,三维扫描技术在已有建筑测量及逆向建模中的应用 [J]. 施工技术,2018,4(7):1102-1103
[2] 周克勤,三维激光扫描技术在特异形建筑构件检测中的应用探讨 [J].测绘通报,2013(8)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)