.jpg)
医疗救援固定螺旋翼一体化电驱动载人飞行器

杨贤淋 宋晨
西南科技大学 四川绵阳 621010
0 引言
随着“低空经济”的高速发展以及国家相关政策的提出,各种低空无人机和载人飞行器百花齐放,
在各个领域展现出独特的风格和优势,在医疗救护领域,固定螺旋翼一体化电驱动载人飞行器则有着巨大的优势,它结合了螺旋翼飞行器利于起飞和降落以及空中悬停的优势和固定翼飞行器飞行速度快、续航时间长的优点,能更好地适应救援过程中各种突发问题,为救援工作的开展提供了有利保障。
同时,随着新能源市场化改革,电驱动载人飞行器也迎来了发展热潮,利用电力驱动代替化石燃料驱动也是未来低空经济行业在新能源领域的发展方向。本文旨在设计一款安全可靠、高效节能、舒适性良好且适用于紧急运输和医疗救援的固定螺旋翼一体化电动载人飞行器。
1 设计思路和工作原理
1.1 设计思路
医疗救援是一项紧急而危险的任务,因此,在运输过程中飞行器要具有良好的安全性和舒适性,保证被救护者在运输过程中生命安全,同时也要具备快速运输的能力,才能保证伤者能及时得到救治。而固定翼飞行器在起飞和降落的过程中会发生明显的颠簸,同时如果在飞行过程中发生突发情况不能悬停,无法为伤者提供良好的救治环境;螺旋翼飞行器可以稳定起降和悬停,但其运输速度不及固定翼飞行器,续航也逊色于固定翼飞行器。因此,为了取长补短,我们将二者进行结合,从而确保运输过程高效稳定的完成。在此基础上采用电力驱动,充分利用新能源的优势,降低运输成本,同时达到环保的目的
1.2 工作原理
固定螺旋翼一体化电驱动载人飞行器在医疗救护过程中通过固定翼和螺旋翼的协同工作来实现飞行器的起飞、降落和飞行任务。
在起飞阶段,飞行器通过控制螺旋翼的旋转提供升力,使得飞行器可以垂直向上攀升,达到一定高度后可根据行驶距离选择驱动方式,可以通过改变螺旋桨的倾斜角度来改变空气推力方向,进而达到行驶的目的,这种驱动方式适合短距离的行驶,也可以选择达到行驶高度后,通过活塞发动机提供动力,与固定翼协同工作,为飞行器提供推力,这种驱动方式适合长距离行驶。在降落过程中,关闭活塞发动机,调整螺旋桨角度,使得飞行器能平稳地垂直降落到地面。
2 飞行器模型的设计和特点
2.1 模型设计
图一为固定螺旋翼一体化电驱动载人飞行器的俯视图,图二为飞行器的侧视图,图三为飞行器的仰视图。
图1 飞行器模型三视图图

2.2 飞行器参数分析
飞行器结构通过空气动力学分析,同时参考相关载人飞行器设计知识得出飞行器各构部件的形状和参数。
固定翼和螺旋桨采用两个螺旋桨以及一对固定翼,翼型选用高升力系数、低阻力的翼型,采用较尖的平直翼,机翼长度 3.1 米,桨叶长度 1m、宽度根据空气动力学计算确定,确保在巡航速度下有最佳的升阻比。
升力和阻力公式如下
其中 L 为空气对机翼产生的垂直于来流方向的升力 ;D 为流体对机翼产生的平行于来流方向的阻力;
CL 为升力系数,是无量纲参数,其值与物体形状、迎角、雷诺数等相关(例如机翼迎角增大时,CL 先增大后减小,超过临界迎角会失速);ρ 是流体密度空气在标准状态下约为 1.225kg/m3;V: 飞行器与流体的相对速度;S 升力面积,这里采用机翼平面面积;CD 为阻力系数,是阻力压力与动压之比。
螺旋桨转速根据动力系统和飞行性能要求设计为合适的转速范围600-800r/min。机身设计外形采用流线型机身,减少空气阻力。机身头部设计为圆润形状,机身尾部逐渐收缩。长度为 8.39 米,根据内部空间布局和空气动力学优化,宽度为 2.41 米,保证客舱空间和飞行稳定性。
3 实验以及数据分析
3.1 前期处理
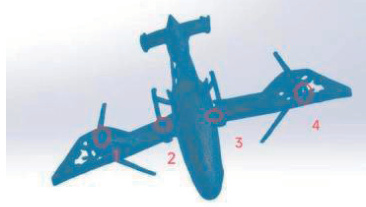
对飞行器进行,网格划分,如下图,着分析机身与机翼和机翼与螺旋桨的连接处的应力情况,分别标记四处地方为 1 号、2 号、3 号、4 号点位。
图2 网格划分
3.2 实验以及数据采集
通过地面静态载荷测试,使用加载设备模拟各种载荷情况,检查结构的变形和强度。进行飞行试验,在不同飞行姿态和工况下监测飞行器的响应,收集数据,并将所测得数据取平均值。1 号点位变形值为 5.30mm,应力值为 20337Pa,2 号点位变形值为 7.47mm,应力值为 51483Pa,3 号点位变形值为 6.95mm,应力值为 52521Pa,4 号点位变形值为 5.17mm,应力值为 21541Pa。
3.3 实验数据分析
机身与机翼处的变形设计值为 7mm ,应力设计值为 25000Pa, 机翼与螺旋桨的连接处的变形设计值为 10mm,应力设计值为 55000Pa。将所测得的实验数据整理,与设计值比较,对比后发现实验数据均小于设计值。因此,飞行器具有良好的安全性。
4 结论
综上所述,固定螺旋翼一体化电驱动载人飞行器具有着良好的性能参数,为医疗救护的运输中所追求的舒适性和安全性提供了有力保障。同时也具有环保性和经济性,在未来“低空经济”市场上具有着良好的发展前景,在医疗救护领域有着巨大的应用价值。
参考文献
[1]Goldstein B .Electra Completes Hybrid eSTOL Demos At NASA Langley Center[J].Aerospace Daily & Defense Report, 2024(Aug.14):289.
[2] 何腾江 , 张诗悦 , 方元昊 , 等 . 翠亨新区低空经济“起飞”[N].中山日报 ,2025-07-01(005).
[3] 于洋 , 魏尧 , 王靖云 , 等 . 低空物流关键技术发展及挑战 [J/OL]. 长沙理工大学学报 ( 自然科学版 ),1-34[2025-07-13].https://doi.org/10.19951/j.cnki.1672-9331.20250514001.
[4] 孙宇昂 , 李钰如 , 李贵珊 , 等 . 仿生飞行器起步架设计:青蛙弹射机制的借鉴与应用 [J]. 中国军转民 ,2025,(11):38-39.
[5] 戴今钊, 陈海昕. 宽速域变体双翼飞行器气动布局设计研究[J].宇航学报 ,2025,46(03):426-438.
[6] 薛栋 , 朱紫文 , 宋笔锋 . 仿鸟扑翼飞行器关键技术综述 [J]. 航空学报 ,2024,45(17):63-98.
作者简介:杨贤淋(2004-),男,本科生,工程力学专业宋晨(2003-),男,本科生,工程力学专业
.jpg)
.jpg)
.jpg)