.jpg)
一种耦合多功能安全应急用无人机声光报警技术

张林灵 周舟 龙成行 周小莉 李冯兰
重庆科技大学 重庆 401331
1. 课题背景及意义
随着物联网技术的快速发展,无人机作一大高科技分支,已广泛应用于物流运输、农业监测、灾害救援、军事侦察等领域。然而,无人机在复杂环境中,其定位精度可能差的情况,以及状态情况无法被很好的检测到,传统的无人机方案为无人机内部装载了一个 GPS 定位系统。对于其他飞行环境中造成的定位不准确以及没有其他有效的报警装置情况下,一款外置的无人机定位装置显得尤为重要。因此,研究一种低成本、适应性强且能独立于无人机本体的外置定位系统,成为推动无人机技术进一步发展的一条有力分支。
本技术基于ESP32 微控制器展开,要设计并开发一种新型无人机定位系统,借助多传感器数据融合以及 4G 通信技术,来解决无 GPS环境下无人机定位可靠性方面的问题,具体目标如下:利用ESP32 集成的 GPS 模块、姿态传感器、气压计等多种传感器,达成实时数据采集与预处理,搭建基于 4G 网络的云平台数据处理框架,实现定位结果的远程传输以及实时反馈,开发手机 APP 交互界面,可直观展示无人机位置、传感器状态以及故障报警信息。
2. 多功能声光报警技术概要设计
2.1 技术实现的功能
本文设计的多功能安全应急用无人机声光报警技术主要分为六个部分,各部分技术如下:
(1) 激光测距,装置可以检测自身与地面的距离并将数据反馈到手机 APP 上。
(2) 越障预警,装置可以检测前方是否存在障碍物,并反馈与障碍物的具体距离。
(3) 声光报警,用户可以通过手机 APP 启动声光报警器提醒周围人员或协助工作人员进行无人机装置找回工作。
(4) 起飞提醒,用户可以通过 APP 开启“起飞提醒”功能,避免无人机在起飞过程中造成意外事故。
(5) 坠落预警,当无人机处于坠落状态能够即使给予用户反馈,做出反应。
(6) 定位,用户对 APP 当前绑定的多功能报警装置进行实时定位并显示具体经纬度,同时可以通过 APP 的地图页面查看到当前多功能报警装置具体位置
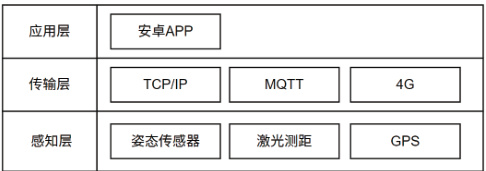
2.2 技术架构设计
本技术的实现主要被划分成三大层次,分别是感知层、传输层以及应用层,感知层在无人机定位系统里为后续的定位与导航提供数据方面的支撑,其具体类型包含姿态传感器,可用来测量加速度和角速度,以及测距传感器,用于测量距离,另外有定位传感器,可获取地理位置信息,传输层会把感知层汇聚而来的数据转发到云平台,以此来支持后续的分析处理。在这个方案当中,运用 4G 模块进行云平台数据的上传,应用层是无人机定位系统的交互界面,负责进行数据解析与数据显示,在当前的项目架构里,该层级主要由云平台以及手机APP 构成,达成用户操作与系统反馈的闭环管理,云平台作为远程服务器,有获取、存储以及处理感知层数据的作用。该系统可实时开展数据分析,并且将数据以数据反馈的形式返回给 APP,除此之外云平台还拥有存储历史数据的功能,支持用户查看历史数据以及数据折线图,安卓 APP 作为用户界面,以 1 秒一次的时间间隔向云平台发送get 请求,请求云平台设备的各项传感器数据,并且将其展示给用户。用户可凭借安卓 APP 查看无人机的实时位置、传感器数据报警信息等,还可执行一些控制操作,在地图上可呈现无人机的实时位置,传感器数据显示包含各类采集数据,比如无人机上升、下降以及坠落的姿态和高度测距以及障碍测距参数,无人机遇险时触发声光警报,警示操作者存在风险。进行坠落检测,检测无人机是否坠落,并发出警报,开展障碍物检测,检测无人机周围是否存在障碍物,并发出警报,进行高度测距,测量无人机与地面的距离,应用层凭借友好交互界面,支持用户远程实现无人机的实时监控与管理功能,系统框架图如图2.1所示。
3. 多功能声光报警技术详细设计
3.1 系统硬件设计
(1)ESP32
ESP32-WROOM 是高性能物联网芯片,集成双核处理器(最高240MHz)、Wi-Fi 和蓝牙功能。具备出色的射频性能和超低功耗深度睡眠模式(微安级),广泛用于智能家居、工业自动化等场景。
(2)Air780
Air780E 是工业级 4G Cat.1bis 模组,支持全球网络覆盖和 NB-IoT/GPRS 双模。拥有微安级超低功耗,集成存储,提供丰富接口,适用于电池供电的物联网设备如智能井盖、远程监控。
(3)LORA 模块
433MHz LoRa 利用低频特性实现超远距离通信和强穿透绕射能力,尤其适合建筑物密集区域。结合 LoRa 低功耗优势,是电池供电、远距离物联网应用的理想选择。
(4)TOF400C
TOF400C 是小型化激光测距模块,基于飞行时间原理,最大测距4 米,频率 50Hz 。具备小体积、低功耗、高精度、响应快特点,适用于自动对焦、3D 测量、检测等场景。
(5)JQ9800
JQ9800 是语音播报模块,支持MP3、WMV 等音频格式解码播放。采用集成方案,方便与单片机结合,用于设备语音提示、人机交互控制。
(6)ATGM336H
ATGM336H 是一颗高性能全星座 GNSS 定位模块,支持多系统融合定位授时。特点包括高灵敏度、低功耗、抗干扰、高可靠性,并支持辅助定位。
(7)IP5306 电源管理芯片
IP5306 是高度集成的电源管理芯片,专为移动电源和便携设备设计。包含锂电池充电管理、升压转换、电量指示功能,支持大电流快充和LED 电量显示。
(8)MPU6050
MPU6050 是集成 6 轴运动传感器(3 轴陀螺仪 +3 轴加速度计),内置运动处理单元。通过 IIC 接口通信,可扩展磁力计实现 9 轴姿态感知。
(9)WS2812
WS2812 是智能全彩 LED 灯珠,内置控制芯片。每个灯珠可独立编程,显示1677 万色并256 级调光,支持串行级联控制,传输稳定
(10) 高分贝蜂鸣器驱动电路
S8050 是常用 NPN 三极管电路,用于驱动蜂鸣器等负载。典型连接包括基极控制信号输入、集电极接负载、发射极接地,常配置限流和下拉电阻防止误触发。
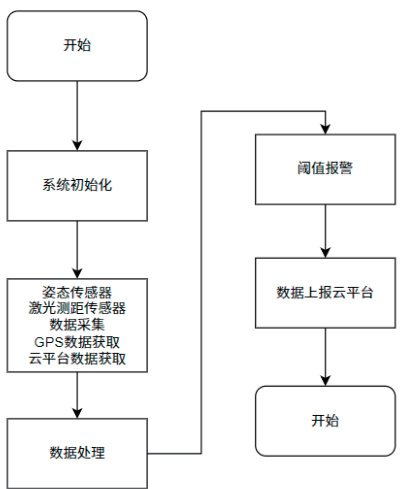
3.2 系统软件功能设计
该系统通过分层架构实现无人机全流程监控与控制:启动时完成传感器校准、参数加载及硬件自检等初始化操作;随后感知层实时采集GPS 位置、测距及姿态传感器数据,通过校验机制确保传输完整性;处理层利用多源融合算法解算高精度状态信息,并响应用户指令生成控制信号;传输层通过无线链路将结构化数据发送至应用层,支持断网缓存与重连;应用层则动态更新地图轨迹与仪表面板,通过状态机判断无人机运行模式,同时将用户指令下行至处理层形成闭环控制,实现从数据采集到交互反馈的全链路自动化管理。整体流程见 图 3.1。
(1)4G 模块 MQTT 初始化
MQTT 通信协议的初始化配置是实现稳定可靠数据传输的基础,主要包括 MQTT 服务器连接配置、客户端 ID 配置、通信协议参数配置以及发布/ 订阅主题配置四个核心环节。
系统通过 4G 模块建立网络连接,确保设备能够接入互联网。成功联网后,开始初始化 MQTT 协议的服务器地址、端口号、客户端标识符以及连接凭证等各项参数。完成基本参数设置后,系统进一步配置MQTT 通信的具体细节,包括设定需要订阅的主题以接收特定消息,以及确定要发布消息的目标主题。当所有订阅和发布参数配置完毕后,本次 MQTT 协议的初始化流程结束。此初始化过程通常在设备启动时执行一次,为后续基于MQTT 的通信奠定基础。
(2)GPS 数据获取
系统通过串行通信接口从 GPS 模块接收原始数据流,并对这些原始数据进行解析,从中提取出关键的经度和纬度信息,将这些信息从原始的字符串格式转换为适合计算的浮点型数值。随后,系统对解析出的经纬度数据进行纠偏处理,以修正 GPS 系统固有的定位误差。完成纠偏后,系统进一步将数据从标准的全球大地测量系统坐标系转换到所需的特定本地坐标系。在数据处理的最后阶段,系统会执行异常检测机制,识别并过滤掉无效或明显错误的数据点。完成上述所有步骤后,本次GPS 数据获取与处理流程结束。
(3) 激光测距
测距传感器主要用于高度测距以及障碍测距,通过 I2C 通信方式与 ESP32 进行通信。对获取的测距数据,系统会立即进行异常检查,若发现数据无效或通信错误,则进行相应处理,对于有效的数据,系统会将其与预先设定的安全距离阈值进行比较判断。若检测到的距离值小于或等于该安全阈值,则判定为前方存在障碍物;若距离值大于安全阈值,则判定为无障碍物。最终,系统将此次障碍物检测的结果(有障碍物或无障碍物)上报给主控系统执行相应逻辑。
(4) 姿态传感器
姿态传感器主要由 MPU6050 的角度进行判断,对获取的加速度值结合重力加速度计算出倾斜角度,在初始化时校准倾斜角度,在系统运行中对倾斜角度进行阈值判断,超过阈值则被认定为装置坠落。系统通过 I2C 通信总线与姿态传感器进行通信,向其发送数据读取指令并接收返回加速度、角速度或姿态角等原始姿态数据,系统会对获取到的数据进行有效性检查或通信状态判断,若发现数据无效、校验错误或通信超时等异常,则执行相应的错误处理操作。
无人机上升或下降姿态的检测流程启动后,系统首先获取传感器数据,判断是否连续三次识别出符合标准的上升动作或者下降动作,如果连续三次检测都确认了上升或下降动作的存在,系统则判定无人机正在进行上升或者下降操作,一旦做出此判定,系统立即触发语音播报功能,清晰播报出无人机正在上升或者正在下降的状态信息,完成本次状态判断与播报后,流程结束。
4. 总结与展望
本多功能安全应急用无人机声光报警技术通过起飞、下降,障声光报警有效防治飞行伤人,并具备坠毁后 GPS 定位与声光报警功能以快速寻回减少损失;其 APP 支持多装置集中控制,采用灌胶绷带封装实现轻量、防摔防水且低成本。该装置显著提升飞行安全与寻回效率,推动产业发展。后续将优化通信、算法、报警效果、抗干扰性及数据处理能力,并提高兼容性、降低成本,以持续保障安全飞行。
参考文献
[1] 蒋文 全 , 高豪云 , 郑佳秋 , 等 . 无人机在民用行业应用研究综述 [J/OL]. 机 电 工 程 技 术 ,1-8[2024-09-28].http://kns.cnki.net/kcms/detail/44.1522.TH.20240821.0848.002.html.
[2] 高迪 . 无人机避障雷达目标探测与跟踪算法研究 [D]. 哈尔滨工业大学 ,2017.
[3] 赵海 兰 , 赵之赫 . 基于单片机的红外遥控智能小车的设计 [J].电子世界 ,2013,(03):31-33.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)