.jpg)
基于多传感器融合的高压配电线路无人机防腐漆智能补漆装置设计

林世康
贵州电网有限责任公司凯里雷山供电局 贵州雷山 557100
1 引言
输配电线路的金具一旦发生腐蚀就会引发故障,不仅给电网安全稳定运行带来威胁,还可能引起输配电设备的损坏,从而导致客户故障停电,引起客户投诉。目前通常采用更换金具或者是人工登杆、登铁塔的方式进行防腐漆喷补来预防金具的加速腐蚀。人工登杆、登铁塔的补漆方式需要停电,同时在作业点需要满足《电力安全规程》的封闭地线的相关要求,这需要花费大量的时间成本,也势必要影响线路的供电可靠性和增加客户的停电时间。随着“无视频不作业”要求的稳步推进,登杆、登塔作业需要花费的时间更多 [1]。与此同时,登杆、登塔还受到天气因素的影响,特别是凝冻等恶劣天气,直接加大了登杆难度,也增加了作业人员的高空坠落风险。因此,迫切需要开发一种免登杆(塔)、易于操作、补漆效率高、作业风险低的方式给输配电设备进行防腐漆的补漆,用于提高电网系统金属设备的耐蚀性。
本文通过研制一种具有远程控制自动喷漆的设备,搭载在无人机下,实现免登杆(塔)的地面操控喷漆作业方式,不仅增加了工作的效率,同时也降低了金具防腐漆的作业的高空坠落风险。
2 总体设计
2.1 装置组成
该装置可能包括无人机平台、多传感器系统、防腐漆喷涂模块、智能控制与处理系统等核心组成部分。无人机平台负责将装置输送到需要补漆的高压配电线路附近;多传感器系统用于实时感知和检测周围环境及线路状态;防腐漆喷涂模块负责实际的补漆作业;智能控制与处理系统则负责整合传感器数据,规划喷涂路径,并控制整个作业过程。
2.2 多传感器融合
多传感器系统可能包括毫米波雷达、激光雷达、光电传感器等,这些传感器能够提供关于高压配电线路位置、形状、周围环境等多方面的信息。通过融合这些信息,可以实现对高压配电线路的精确识别和定位,为后续的喷涂作业提供准确指导。光电传感器可以提供RGB图像,辅助激光雷达进行物体类别的判断;毫米波雷达则可以提供深度、速度和方位信息。这些信息融合后,可以构建出高压配电线路及其周围环境的精确模型[2]。
在机载测量系统中, GPS/IMU 联合定位系统可给载机提供世界地理参考系位置信息,利用 AprilTag 技术可以得到 AprilTag 对于传感器的 6 自由度姿态信息。摄像头及光学雷达与 GPS/IMU 之间的关系见图1。
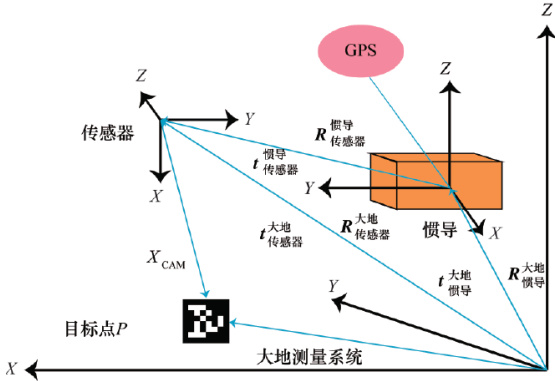
图1 传感器标定的位置关系
2.3 机器视觉系统
无人机着陆点地面标志图像拍摄设备、图像采集卡及视觉处理单元。无人机着陆点地面标志图像拍摄设备主要由 CCD 图像传感器组成,CCD 图像传感器主要由 CCD 电荷耦合器件构成 [3]。图像采集卡通过外部信号接口对接 CCD 图像传感器,采集到的来自地面的图像并传递给视觉处理模块。视觉处理模块以 STM32F427CPU 作为核心控制电路,具有丰富的硬件资源和扩展接口,主要实现图像处理、特征提取、定位计算等功能。经过一系列的计算,机器人视觉系统给出无人机姿态信息如俯仰角、旋转角、飞行朝向,并给出对应坐标信息。
2.4 智能控制与防腐漆喷涂
智能控制与处理系统需要能够整合来自多传感器的数据,分析高压配电线路的状态和补漆需求,然后规划出最优的喷涂路径和策略。这可能需要采用先进的算法和技术,如模糊神经网络、模糊聚类等,以实现对复杂环境的准确理解和应对。在喷涂过程中,系统还需要能够实时监控喷涂质量和进度,根据监控数据及时调整喷涂策略,以确保喷涂质量和效率。防腐漆喷涂模块需要能够适应高压配电线路的特殊环境和形状,确保防腐漆能够均匀、准确地喷涂在需要补漆的部位。这可能需要采用特殊的喷涂技术和设备,如电磁喷头、涂覆机器人等。
3 无人机自主飞行控制方案
本文基于四旋翼小型无人机实现了由协同计算终端和开放飞行动力学系统构成的二层操纵系统,并采用 RTK-GPS 和激光雷达获得空中定位数据,按照 ROS、MAVROS 以及 MAVLink 通讯规范建立一套完整的无人机高精度自驾导航策略框架 ( 如图 2 所示 )。整体由地面设置 PiksiMultiRTK-GPS 基准点、 RFD900+ 无线收发器、轻薄笔记本的地面站,携带四旋翼无人机平台、Pixhawk 开源动力控制系统、RTKGPS 移动车载接收器、无线发射 / 接收装置、扫描激光器、协同处理器等其他配件的无人机系统和地勤人员监督并能够响应无人机飞行状态对必要的控制命令进行调控的地勤人员构成,他们通过QGround Control 软件对无人机进行远程控制并在必要时使用遥控器,这样当无人机转入自动驾驶模式后,若出现突发情况,能够马上转换为人工飞行控制方式[4]。
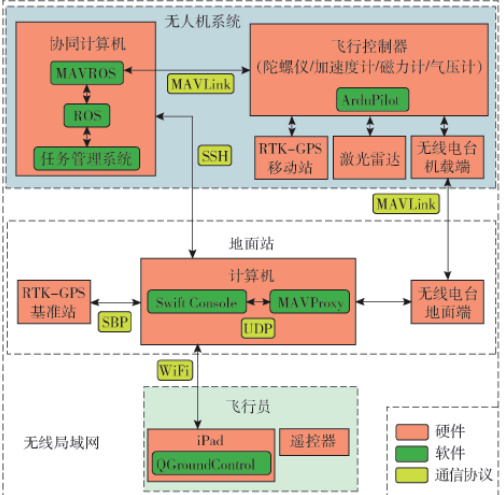
图2 无人机精准自主飞行控制方法整体方案
4 巡检补漆实验
4.1 应用案例
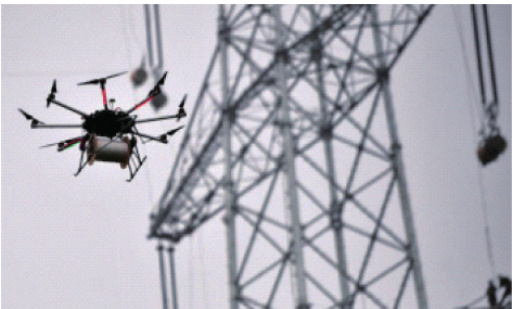
通过搭建无人机巡检试验平台,开展了一系列线路线缆检验,用以验证本节提到了巡检方法是正确的。实验地点为东莞市供电局所管辖部分的一条11kV 线路的部分范围,如图3 所示。总共有2 个数据集,每组用时约 18min ,共有 60min ,编号为 T1-T2 和 T3-T4。
图3 测试场地为东莞供电局管辖线路中一段 11kV 线路
根据试验区域范围,确定无人机飞行路线,同步收集多个传感器的数据。其中一部分数据保存在本地硬盘,另外一部分通过 4G 传输到主数据中心。为了达到特定的语义分割任务,构造了基于飞行器收集的数据,分辨率为 1328 像素 ×1048 像素的数据集。把数据集分为2 类:2817 张训练图片和 200 张测试图片,图片都有人工真实标签,标注工具使用了LabelMe 软件。
4.2 结果分析
(1)补漆效果分析
补漆效果是评估智能补漆装置性能的关键指标。我们通过对比补漆前后的线路表面,分析了补漆的均匀性、覆盖率和涂层厚度。结果显示,智能补漆装置能够实现高度均匀的涂覆,覆盖率达到了 98% 以上,涂层厚度符合国家标准,有效延长了线路的使用寿命。
(2)抗干扰性能测试
在实际应用中,无人机可能会遇到各种电磁干扰和恶劣天气条件。为此,我们对智能补漆装置的抗干扰性能进行了测试。实验表明,装置在电磁干扰环境下仍能保持稳定运行,且在风速达到8 级的情况下,无人机仍能安全完成补漆任务,显示出良好的抗干扰能力。
(3)能耗与成本效益分析
为了评估智能补漆装置的经济性,我们对装置的能耗和长期运行成本进行了分析。结果显示,相较于传统的人工补漆方式,无人机智能补漆装置的能耗降低了约 30% ,且在长期运行中,其维护成本也相对较低,具有良好的成本效益。
(4)安全性评估
对智能补漆装置的安全性进行了评估。实验证明,装置在运行过程中能够有效避免与高压配电线路的接触,降低触电风险。同时,无人机配备了紧急停机系统,确保在遇到突发状况时能够迅速响应,保障作业人员的安全。
结语
综上所述,基于多传感器融合的高压配电线路无人机防腐漆智能补漆装置设计是一个复杂而细致的过程,需要综合考虑多个方面的因素和技术点。通过不断的技术创新和实践应用,有望为高压配电线路的维护和保养提供更加高效、智能的解决方案。
参考文献
[1] 廖红兵 , 况松陵 , 李扬帆 , 等 . 复杂场景下基于深度学习与多传感器融合的无人机配网巡检智能避障技术 [J]. 测绘通报 ,2025,(01):22-28.DOI:10.13474/j.cnki.11-2246.2025.0105.
[2] 蔡欣恩 . 融合多传感器数据的无人机三维建模方法研究 [J]. 张江科技评论 ,2024,(07):126-128.
[3] 刘飞 , 单佳瑶 , 熊彬宇 , 等 . 基于多传感器融合的无人机可 降 落 区 域 识 别 方 法 研 究 [J]. 航 空 科 学 技 术 ,2022,33(04):19-27.DOI:10.19452/j.issn1007-5453.2022.04.004.
[4] 钱金菊 , 潘子宇 , 麦晓明 , 等 . 基于多传感器融合的无人机电 力 线 巡 检 [J]. 测 控 技 术 ,2021,40(01):100-104+131.DOI:10.19708/j.ckjs.2021.01.016.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)