.jpg)
自动驾驶铁路接触网作业车的速度控制研究

陈拓 晋毅东 张玮龙 郭伟锋 姚胜利
陕西法士特汽车传动有限责任公司 陕西 西安 710119
前言
车辆的速度控制一直是自动驾驶车辆的重要研究方向。如今轨道运输车辆已经部分配备了成熟的自动驾驶系统(ATO)来替代驾驶员的驾驶操作,实现列车的自动驾驶控制;ATO 的研究一般有包括两个重要方面:目标曲线的优化以及目标曲线的跟踪。Howleft 教授 [1] 在最优运行策略的研究上证明了最优运行曲线的存在性;顾桂梅教授 [2] 在目标曲线生成上延用最大牵引、巡航、惰行、最大制动的操作序列,并在后续跟踪上取得良好的效果;
接触网作业车的速度控制研究却鲜有涉及,本文将基于监控模式进行接触网作业车的速度控制研究。接触网作业车为 GCY-300 Ⅱ型内燃机车传动系统驱动,JZ-7 型空气制动,且不配有 ATO 系统,根据实际运行要求,区别与列车最大牵引、惰行的运行方式,将作业车的速度控制与汽车纵向控制相结合进行设计;
基于 GYK 限速曲线生成在各限速工况下均满足要求且利于跟踪的目标曲线;并基于目标曲线进行速度控制器的设计 ; 速度控制器分为上位控制器和下位控制器;最后采用在制动机操作端加装伺服电控系统以及相应的机械结构进行作业车的指令执行。
1作业车行车控制架构
作业车速度控制首先根据 GYK 提供的作业车前方 2~3km 的限速曲线,进行最小池化、静态调速、微分、时域化处理,生成目标曲线 v-t,s-t 作为速度控制器的参考输入。上层速度控制器采用MPC 控制算法并根据输入的目标曲线以及当前车速计算期望加速度,实现多约束条件下的速度控制;下层速度控制器通过驱动与制动的切换策略以及逆动力学模型实现作业车的控制。
图1 速度控制整体架构

2 目标曲线设计
2.1 目标曲线生成
将最小限速曲线进行最小重叠池化处理,有利于车辆提前处理前方道路限速信息,便于作业车提前减速;池化窗口大小取决于作业车实际车速跟踪能力。池化边缘问题,首先利用数据的前端和末端进行扩边延伸,再进行作业车前方限速曲线的处理;由于后续处理有采用跟踪微分器,因此对于重叠池化的操作进行定量的前向偏移,一般设置1/3 窗口宽度为宜:
 (1)
(1)
车区间运行时长限制以及驾驶员运行经验对最小限速曲线进行静态速度调整;根据后面时域化处理方式可知,在池化窗口宽度与微分跟踪器的速度因子 r 确定的情况下,区间运行耗时与区间实际运行车速呈下式关系:
 (2)
(2)
其中,T 为区间运行时长, Vk 、 ΔVk+1 为基础限速,ρ 为速度调整系数。
利用上面公式进行的解算,可以达到控制区间运行时长。同时为了保障曲线连续性,在曲线处理方式连接处进行过渡处理。
本文采用微分跟踪器(TD)进行限速曲线 v-s 的过渡处理,增强最低限速曲线的连续性特征,使曲线过渡平滑,符合正常驾驶习惯,同时减小信号噪声。这里给出微分跟踪器的离散形式,系统可表示为:
 (3)lx(k+1)=x(k)+Tu,lu|≤r
(3)lx(k+1)=x(k)+Tu,lu|≤r
式中,T 表示系统采样步长,u 为系统输入。
u=fhan(x1,x2,r,T0,c) (5)
微分跟踪器的离散形式可由上式联合得到。
其中,速度因子 r 的选取符合全制动工况以及全加速工况的约束。
经过以上最小池化 - 全程调速 - 微分处理生成的目标曲线,即为目标 v-s 曲线。
2.2 目标曲线时域化
目标 v-s 曲线基本满足目标车速曲线的特征,而速度控制器的输入为目标车速 v-t 曲线。因此v-s 曲线生成目标速度 v-t 曲线是曲线处理的重要步骤。
假定车速在小距离范围内保持相对位移线性变化,取第k 段曲线进行计算;于是有
v=ak+bk*sk (6)
其中 ak ,b ,分别为第小段曲线系数, sk 为第k 小段曲线结束时总计路程。微分变换得:
 (7)
(7)
其中, ck 为待定积分常数。
s,t.:v(0)=v0
即:
 (8)
(8)
做如下变换得到每小段曲线时间递推公式:
其中, tk 与 tk-1 分别为第 k 小段和第k-1 小段位移结束耗费总时间;△s 为每小段行驶距离。
于是可以得到 tk 与 tk+1 之间的递推关系进行迭代即可获得所有初值条件。
3 控制器设计
3.1 上位控制器设计
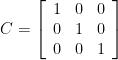
3.1.1 车辆预测模型建立
采用常用的一节惯性系统来表示实际加速度和系统控制输入的关系:

其中,系统增益取 k=1 ,系统响应时间取 τ=0.4 。
状态变量、控制量分别取 u=ades
利用前向欧拉进行系统离散化,得到离散化系统状态空间方程:
x(k+1)=Ax(k)+Bu(k) (14)
其中:
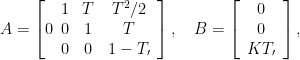
作业车速度控制为主要要求,同时为了保证规定运行时长完成出行任务,行驶位置具有一定要求;另外,机车的加速度应保持在较小范围内。因此,本文将距离d、 vν 、a 作为系统输出。
系统输出表示为:
y(k)=Cx(k) (15)
其中:
作业车跟踪或者保持一定的速度时,应该避免冲击力过大,因此应当对作业车的加速度以及加速度变化率进行控制。
将系统输入改为 Δu(k) , 同时令状态变量为
ξ(k)=[x(k)u(k-1)]T
可以得到以下状态方程:

其中:

式中 m 代表系统输出维度,n 表示系统状态变量个数。
利用以上状态方程作为预测模型进行未来时间系统输出量的预测,有:Y=Gxξ(k)+FxΔU (17)
其中,Y 为预测时域所有时刻的输出, Δ U 为控制时域的所有输入增量,Gx 、 Fx 为相应的系数矩阵。
3.1.2 迭代约束求解
性能优化指标表述为:在保证车辆速度趋于目标车速的同时使车辆行驶位置趋于期望位置,控制过程中车辆加速度尽可能小,车辆加速度变化率尽可能小。
将目标速度、位置作为参考输出,同时记为:
系统输出中增加加速度,对应的参考输出增加 0Np*1 项,记为:
Yref=[drefNp*1vrefNp*10Np*1]T
因此评价函数定义为
J=(Y-Yref)TQQ(Y-Yref)+ΔUTRRΔU (18)
其中, Q0 、 RR 分别为系统输出量、控制增量的权重矩阵与相应单位列矩阵的Kroneck 乘积,初值确定。
系统约束为加速度及其变化率,根据增量关系以及变量统一的要求,对以上评价函数进行约束有优化求解得到最佳 Δ U。
3.2 下位控制器的设计
平直轨道上,作业车阻力可以表示为:
 (23)
(23)
其中,m 为整车质量,  重力加速度,f 滚动阻力, CD 为风阻系数,A 为迎
重力加速度,f 滚动阻力, CD 为风阻系数,A 为迎
风面积, v 为行驶速度。参数不完全已知时,使用如上标定曲线系数 A,B,C 计算阻力。
忽略内部旋转质量,作业车所需纵向力表示为:
 (24)
(24)
其中, ades 为目标加速度。
驱动控制模式时,根据逆动力模型计算出作业车所需的期望扭矩:

其中, rw 为车轮半径, ΠIt 为机械效率, ftr(Str) 为变矩器变矩比, Rg 为变速器变速比,为减速器减速比。
ftr(Stc) 为实时变量,在仿真时同样实时变化。
在已知期望发动机扭矩时,结合发动机转速以及发动机 MAP 图得到期望电子油门输入电压:
(26)
其中,  为电子油门输入最高电压,ωe 为当前发动机当前转速,ψ 为T 、 ωe, u 的映射关系。
为电子油门输入最高电压,ωe 为当前发动机当前转速,ψ 为T 、 ωe, u 的映射关系。
制动模式时,试验标定加速度与制动阀转角关系: ades=fb(θ) ,实时计算制动控制转角θ :
θ=fb-1(ades)=-c1ades+c2,(ades0(v)<0) (27)
其中,  通过最小二乘法标定得到。
通过最小二乘法标定得到。
仿真测试
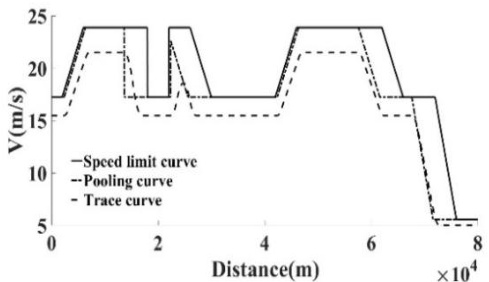
为验证所述目标曲线生成方法,选取部分工况进行仿真,将目标曲线与原限速曲线对比,如图3。
其中部分仿真参数:速度采样取值 5m ,最小池化窗口宽度取139 ;前向偏移宽度取45,静态速度分别取值20,43,86; 微分跟踪器内参数速度因子取值0.5,取 0.1s ;进行临时限速、监控模式行车等工况下的限速曲线处理仿真,
仿真表明:生成的目标速度曲线在任意工况下均完全符合作业车监控模式的限速要求且有利于跟踪;;目标速度曲线一定程度上达到了作业车高效节能运行目标。
图3 监控行车
为验证所述控制方法在作业车监控模式行车下的有效性,在 Matlab/Simulink 进行作业车动力系统建模,以及模型预测控制算法的编写,模拟监控模式行车工况进行仿真测试。控制器模型如图4 :
图 4 Matlab/Simulink 仿真模型

控制器参数选取如下:预测步长 ΔNp 取 10,控制步长 Nc 取 2 ;采样时间取0.1s ;其中车辆约束中加速度约束取[-5,2],加速度增量约束为 [-0.8,0.8];。
图5 速度误差
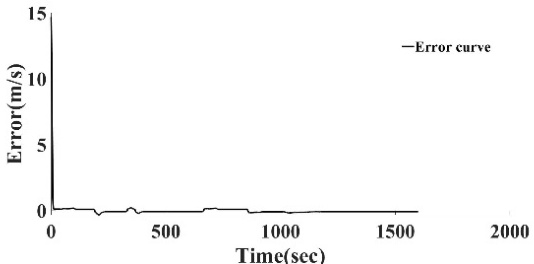
速度跟踪仿真表明:在较长工作区段运行时,对于目标速度的跟踪,在匀速区段误差极小,加减速以及过渡区段,曲线存在一定波动,实际目标速度跟踪误差在绝对值为 0.306 以内,且完全处于限速曲线之下,完全符合运行要求。对于目标位置的跟踪,实际运行里程与目标里程偏差始终保持在保持在较小的范围浮动,误差不超过2.3。
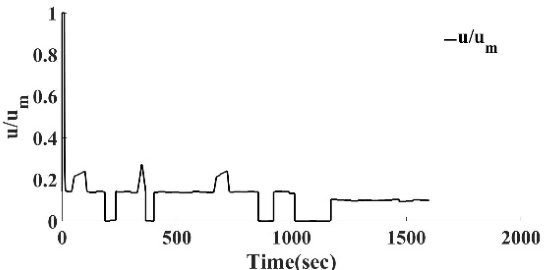
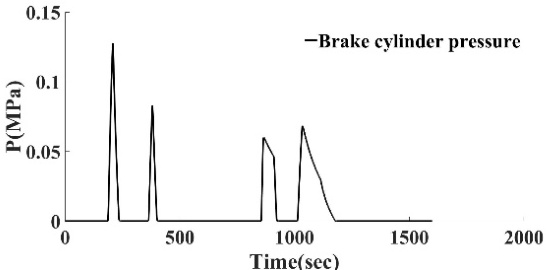
车辆的控制量包括制动电子油门电压与制动缸压力,仿真结果显示,不存在油门与制动同时作用的情况,并且切换过程平稳且不频繁.
图9 控制量随时间变化
结论
本文基于接触网作业车监控模式下的自动行驶,提出了一套解决方案;
针对作业车只提供前方限速信号的工况,提出了将限速曲线进行最小池化、静态降速、微分、时域化的处理流程。在 Matlab 中进行仿真,仿真结果表明:在任意时刻,目标速度曲线符合限速要求、便于实现跟踪且乘坐舒适性较好;
针对限速要求下的速度跟踪采用了分层控制的控制方法,上层控制器基于模型预测方法进行约束优化求出期望加速度,下层控制器通过逆动力学模型获得实际电子油门电压与制动机制动转角;在 Matlab/Simulink 进行仿真,结果表明最大误差绝对值为 0.306m/s. 均方根误差为 0.0315m/s ,将速度实际跟踪曲线转换至 v-s 坐标系下,与输入最低限速进行比对,实现了完全满足限速要求的较高效率运行,达到了预期效果。
参考文献
[1] 杜雨洁.UWB 在无人驾驶轨道交通中的应用研究[D]. 长安大学,2023.
[2] 何之煜 . 自适应迭代学习控制在列车自动驾驶系统中的应用 [D]. 中国铁道科学研究院 ,2019.
[3]施浚珲.人工智能在无人驾驶轨道列车中的应用[J].科技风,2019,(31):8-9.
[4] 翟国锐 , 徐燕芬 , 代军峰 , 等 . 全自动无人驾驶城轨车辆列车网络控制系统研究 [J]. 铁道车辆 ,2021,59(03):17-20.
[5] 何志彬 , 程林芳 , 易海旺 , 等 . 高速铁路 CTCS3+ATO 系统优化方案研究 [J]. 铁道运输与经济 ,2021,43(04):80-85.
.jpg)
.jpg)
.jpg)
.jpg)