.jpg)
基于太阳能自主巡航监测小车的研究与设计

兰保灵 杨蒙宇 刘禹凡 陈升宇 叶宇翔 郑拓
武汉商学院 湖北省武汉市 430056
1 总体设计方案
太阳能自主巡航监测小车主要由:机械结构系统、能源系统两大系统模块组合而成(如图 1 图 2 所示)。能源系统为小车提供源源不断的前进动力,而机械结构系统则保证太阳能小车在环境监测等工作中不会因为环境等外部因素所影响。两大系统的组合为小车在环境监测等相关工作中提供了坚实的系统设施保障,确保其工作的效率与质量 [1]。
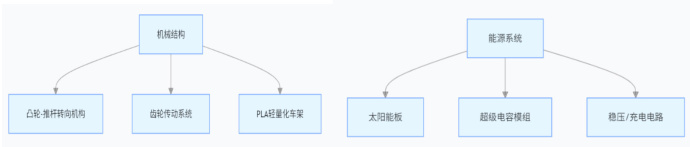
图1 太阳能小车的机械结构系统构成 图2 太阳能小车的能源系统构成
2. 机械结构系统
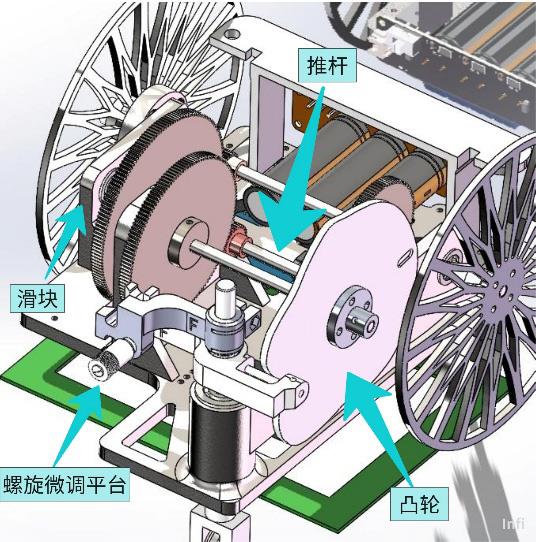
凸轮 - 推杆转向机构是太阳能自主巡航监测小车实现精准路径跟踪与复杂环境适应的核心部件,因此如何设计精准到位十分重要 [2]。团队自研凸轮、推杆、滑块、螺旋微调平台及前轮绕臂四大部分组成凸轮 - 推杆转向机构系统,四大部分相互配合,将凸轮的旋转运动转化为推杆的线性位移,进而控制前轮的偏角,实现小车快速且精准的转向 [5]。其机械结构示意如图3 所示。
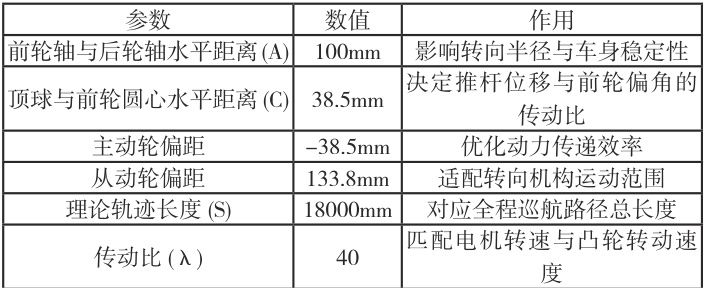
在关键的核心参数中,团队成员基于 SolidWorks 软件建模与实测结合具体作业任务可得到相关的参数数据 [3]。具体计算逻辑和推导过程如下(因实际设计中可能涉及作业项目组专属的适配修正,这里呈现通用化、原理性的计算思路):
① 前轮轴与后轮轴水平距离:在理想阿克曼转向下,前轮轴与后轮轴水平距离 A 直接关联转向半径 R。转向半径公式为  (L 为轴距,近似等同于 A,θ 为内侧前轮偏角)在设计小车路线时,结合理想阿克曼转向充分考虑小车的尺寸及其小车转向的灵活性,确保其稳定行驶。
(L 为轴距,近似等同于 A,θ 为内侧前轮偏角)在设计小车路线时,结合理想阿克曼转向充分考虑小车的尺寸及其小车转向的灵活性,确保其稳定行驶。
② 顶球与前轮圆心水平距离:顶球(可理解为推杆作用于前轮转向节等关键部件的接触点)与前轮圆心水平距离 C、推杆位移 Δx、前轮偏角 Δα 构成几何传动关系。通过几何近似,把前轮转向简化为绕主销的转动,顶球推动转向节带动前轮偏转,因此存在,tanΔ  (偏角较小时,tan Δ∝Δα ,可近似为线性传动比关系)在设计模拟时,先根据电机输出推杆位移能力、期望前轮最大偏角(要覆盖小车复杂路径转向需求),建立传动比需求
(偏角较小时,tan Δ∝Δα ,可近似为线性传动比关系)在设计模拟时,先根据电机输出推杆位移能力、期望前轮最大偏角(要覆盖小车复杂路径转向需求),建立传动比需求  。再结合前轮结构尺寸(前轮半径、转向节结构空间等),经过计算机反复的迭代计算与仿真(在SolidWorks 里搭建转向机构模型,改变 C 值,仔细观察偏角变化),确定
。再结合前轮结构尺寸(前轮半径、转向节结构空间等),经过计算机反复的迭代计算与仿真(在SolidWorks 里搭建转向机构模型,改变 C 值,仔细观察偏角变化),确定  的大小,从而确保推杆位移能高效转化为合理的前轮偏角,让转向响应符合相关作业路径的跟踪要求。
的大小,从而确保推杆位移能高效转化为合理的前轮偏角,让转向响应符合相关作业路径的跟踪要求。
③ 主动轮偏距、从动轮偏距:主动轮与从动轮的偏距设计会影响到齿轮传动时啮合的重合力度、齿面接触应力的大小等。因此,根据相关工作任务时队太阳能小车主动轮与从动轮的偏距的计算尤其重要,同时在实际的小车设计转向机构布局中要留足给凸轮、推杆等部件预留安装空间,让齿轮啮合时受力更均匀,减少磨损,会对中心距进行调整,引入偏距概念。齿轮的相关数据是影响主动轮与从动轮的偏距的核心。先依据所选传动齿轮的模数、齿数、齿形,计算理论中心距(m 为模数;z1,z2 为主动、从动轮齿数),从而确定主动轮与从动轮的偏距。
④ 理论轨迹长度:理论轨迹长度 S 对应太阳能小车全程巡航路径总长度,是把模拟的任务路径进行离散化、拟合计算得到的。实际工作中,操作人员需要先梳理任务需求里的路径关键点,在地图(或虚拟路径规划场景)上标记坐标,用曲线拟合,并利用分段测量(每段直线或者曲线长度累加)的方式把这些关键节点连成完整路径并计算总长度。同时,要考虑到小车在实际行驶过程中因外部环境因素所带来的影响,从而确定小车理论轨迹长度的大致范围,后续再通过实际调试对路径长度适配性验证和微调。
⑤ 传动比:小车的传动比直接决定了电机转速到凸轮转速的转换效率,合适的传动比能够确保凸轮按照预期的速度转动,进而使推杆推动前轮实现精确的转向角度调整。结合传动比 λ 用于匹配电机转速Nmotor 与凸轮转动速度 Ncam 的关系可知,λ 越符合自身小车则小车在面对突发情况才更灵活。其公式上体现为:  (不考虑传动损失理想情况)。
(不考虑传动损失理想情况)。
综上五点均是太阳能小车机械结构设计中的核心数据推导过程,我们将进行多轮测试的结果拿出举例进行参考:
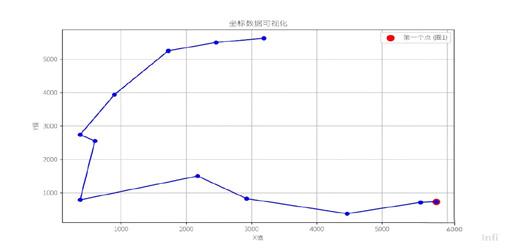
图4 太阳能小车模拟环境监测打卡路径
模拟太阳能小车在一次环境监测时的需要清洁打卡的路径(如图4 所示),结合上述小车的关键参数计算推导思路可得:
当太阳能小车在接受其他工作任务时计算推导过程亦是如此。
3 能源系统
3.1 超级电容模组
超级电容模组能够在短时间内释放大量电能,其功率密度比传统电池高很多,可达到数千瓦每千克甚至更高。这让小车在启动、加速、快速转向等操作时,能够迅速获得足够的动力,同时它承担着电能存储与快速释放的功能,保障小车在不同工况下稳定运行 [4]。因此,团队选用由 3 串 110F 单体电容组成的 36.7F/7.5F 超级电容模组(如图 5所示)。利用多单体电容串联的方式提升电压,满足小车各部件的供电需求。于此同时,该模组具备防呆接口设计,在安装时能够避免因正负极接反而损坏设备,提高了其使用的安全性。此外,还集成了过压( >2.5V 时触发保护)、过流保护功能,可有效保护超级电容和其他电路元件在异常情况下不受损坏。
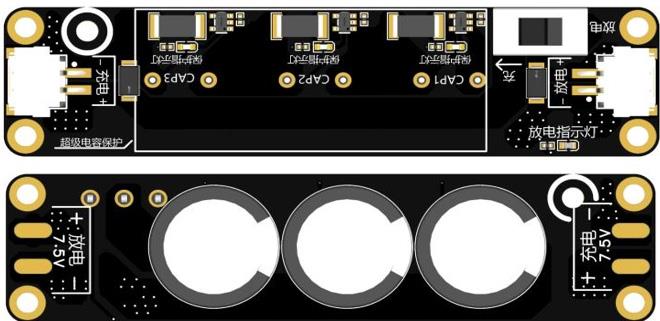
图5 超级电容模组正、反面示意图
3.2 稳压电路与充电电路设计
3.2.1 稳压电路
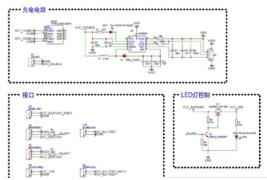
太阳能板输出的电压会随着光照强度、温度等因素的变化而波动,超级电容在充放电过程中其两端电压也会发生改变。而小车内部的电机、传感器、通信模块等用电设备通常需要一个稳定的电压才能正常工作,否则可能会出现性能下降、工作不稳定甚至损坏的情况。所以,太阳能小车需要设计稳压电路,团队基于线性稳压器设计稳压电路,其核心是通过反馈控制机制来实现电压稳定(如图 6 所示)以常见的串联型线性稳压器为例,主要由调整管、取样电路、基准电压源和比较放大器等部分组成。将不稳定的输入电压转换为稳定的输出电压,以满足各用电设备的需求,确保小车在工作时的稳定性与安全性。
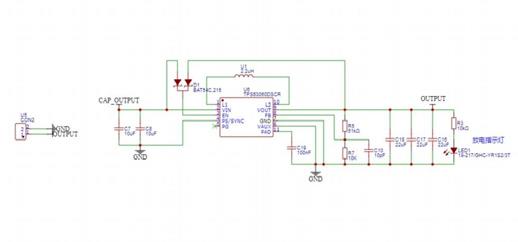
图6 稳压电路工作原理示意图
3.2.2 充电电路
太阳能板产生的电能需要通过充电电路安全、高效地存储到超级电容模组中。同时,要根据超级电容的电量状态、太阳能板的输出功率等因素,合理控制充电过程,防止过充、欠充等情况的发生,以保护超级电容的使用寿命,并提高太阳能电能的利用效率。因此,充电电路设计的核心在于实现高效且可靠的充电机制,使超级电容能够在短时间内获取足够的电能。其工作原理如下(如图7 所示):
a. 快速充电阶段:当超级电容电量较低时,充电电路以较大的电流对超级电容进行快速充电,以缩短充电时间。
b. 恒压充电阶段 : 随着超级电容电量逐渐升高,当电压达到一定值(接近超级电容的额定电压)时,充电电路切换到恒压充电模式。
c. 涓流充电阶段 : 当充电电流减小到一定程度后,进入涓流充电阶段。在这个阶段,以极小的电流对超级电容进行补充充电,确保电容电量完全充满,同时防止过充现象的发生。
图 7 充电电路工作原理示意图
4. 结语
本文设计的太阳能自主巡航监测小车,通过技术整合的运用,实现了清洁能源驱动、自主路径巡航与稳定环境监测的多重目标。凸轮-推杆转向机构保证了路径精度,齿轮传动提升了能量效率,稳压电路与超级电容组合解决了能源稳定性问题,轻量化设计则进一步降低了能耗。设计的整个过程响应了国家生态环境科技创新政策,为“双碳”背景下的智能化监测提供了可行方案。相信,在未来经过团队的共同努力,可以为我国能源综合治理贡献出一份独特的力量。
课题项目 :2025 年湖北省大学生创新创业训练计划项目 : 逐日引擎:基于太阳能驱动的自主巡航监测小车( 编号: 202511654124)
参考文献
【1】 刘 健 , 李 盛 . 太 阳 能 小 车 的 研 究 与 设 计 [J]. 电 子 制作 ,2020,(23):20-22+25.DOI:10.16589/j.cnki.cn11-3571/tn.2020.23.007.
【2】刘智贺 , 郭艾咏 , 陈文扬 , 等 . 基于工程实践的一种太阳能无碳小车设计 [J]. 机械 ,2024,51(06):60-66.
【3】刘兆民 , 陈洪岩 , 吕兴 , 等 . 新型太阳能新能源小车优化设计与仿真 [J]. 吉林化工学院学报 ,2024,41(09):75-80.DOI:10.16039/j.cnki.cn22-1249.2024.09.012.
【4】曾小凤 , 聂永怡 , 王嘉豪 , 等 . 基于工程训练能源接力小车的创新设计 [J]. 电子制作 ,2019,(24):34-35+44.DOI:10.16589/j.cnki.cn11-3571/tn.2019.24.014.
【5】张洪宇 , 葛宜元 , 王琪 , 等 . 太阳能温差发电智能循迹避障小 车 的 研 究 [J]. 农 机 使 用 与 维 修 ,2018,(03):11-14.DOI:10.14031/j.cnki.njwx.2018.03.006.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)