.jpg)
基于数字孪生技术的塔机工作姿态监测系统研究

张涛 王瑗
山东工程职业技术大学
1 塔机数字孪生总体设计框架
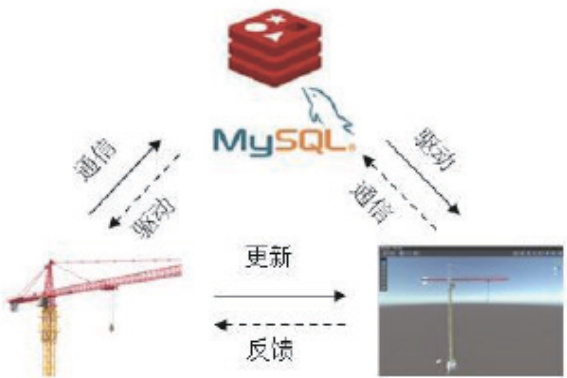
对塔机数字孪生总体框架的搭建包括塔机数字孪生三维框架及其特征分析和塔机数字孪生系统框架的搭建。随着数字孪生技术的不断发展塔机数字孪生有以下几个特点,数据驱动、实时同步、高度保真。数字孪生系统依赖多种通信技术从数据采集到最后应用层的实现还是以真实物理实体,虚拟数字空间,数据通信连接,交互应用四部分为核心。根据数字孪生遵循的三维框架,初步构建基于数字孪生的塔机三维框架包括塔机物理实体、塔机虚拟实体、以及沟通物理空间与数字空间二者的数据连接。如图1 所示数字孪生三维框架。
2 塔机数字孪生总体设计过程
2.1 塔机数字孪生模型的构建
建立塔机虚拟实体是实现基于数字孪生技术的塔机工作姿态感知的基础,通过 SolidWorks 对塔机模型进行初步的构建,要保证塔机三维结构建模的准确性,要对运动状态、规律等特征进行描述,通过分析塔机的各个组成部分,确定塔机工作过程中各部分的三维空间位置及相互配合关系。
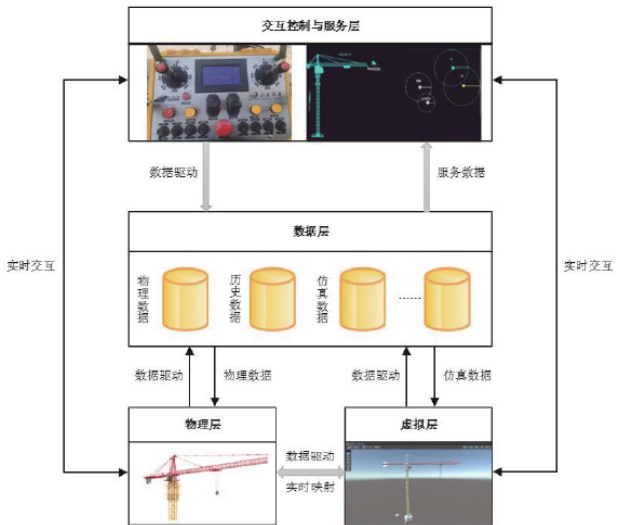
分析塔机运动形式及运动空间,搭建小型实验模型。利用 3dsMax 对塔机模型进行深度渲染。通过加装传感器来获取塔机工作过程中姿态及相关运行参数的信息。直观的展示塔机作业过程中的姿态变化。如图 2 所示塔机数字孪生系统框架。
通过建立三维塔机数字孪生模型,根据对塔机数字孪生需求的分析可以将不影响效果的真机部分进行简化省略。然后将串口安装在塔机小型实验样机各部位传感器采集到姿态信息传入到数字孪生平台中供塔机孪生模型使用。为后续的工作提供模型基础。完成塔机基本工作指令的简单控制系统,包括塔机实验模型的硬件选型、控制分析等。
2.2 塔机数字孪生数据的采集与通信
通过采集塔机物理实体的回转角度、起吊高度等数据,利用 IIC 与 TCP 通信协议构建塔机与上位机的通信,进而完成塔机工作过程中姿态数据的采集与处理,以实现对塔机小型实验样机进行精准分析及运行数据的采集。数据采集系统部分主要实现塔机小型实验样机作业过程中实时运行状态参数的收集,上传与存储,还可以追溯查看历史数据。加速度、角速度等参数通过 IIC 协议进行通信。基于TCP 透传协议将模块连接到物联网平台,实现数据的存储与备份。不仅提升了塔机操作的安全性,通过实时监测和数据分析来预防潜在的危险,还提供了一个无风险的培训环境,通过模拟各种操作情况来提高操作员的技能和应对紧急情况的能力。
3 总结
本文以传统的塔机安全监测为切入点,通过分析国内外塔机结构监测与感知的研究现状,提出了数字孪生与塔机姿态感知相融合的技术方案,并从工程实践角度开发了塔机数字孪生姿态感知系统,对塔机数字孪生建模仿真、孪生数据采集传输与存储等关键技术进行了研究。
参考文献:
[1] 冯玉祥. 塔机监控系统数据传输方法及工程应用[D]. 武汉轻工大学,2022.
[2] 马禾耘 , 乐智君 , 曹小均 , 等 . 塔机安全监控系统的发展与应用 [J]. 建筑机械化 ,2017,38(08):47-49.
[3] 徐 杰 . 塔 机 安 全 监 控 系 统 技 术 的 发 展 与 应 用 [J]. 建 筑 机 械化 ,2013,34(10):72-75.
.jpg)
.jpg)
.jpg)
.jpg)