.jpg)
军用智能装备的设计流程与关键问题研究

肖龙腾
432524198209211316
前言
在人工智能时代下,各种先进的人工智能技术不断涌现,在军事领域,很多装备搭载了各种人工智能技术,显著提升了军用装备的智能化水平。为了推动军用智能装备应用发展,有必要从军用智能装备系统设计与工程化的角度入手,加强对军用智能装备的原理、组成部件、设计方案、工程化的深度分析,并对现阶段智能装备技术水平、技术瓶颈进行讨论,这对推动后续军用智能装备设计应用发展有着非常积极的影响意义。
1 军用智能装备原理与组成部件
军用智能装备的工作原理并不复杂,在装备系统工作运行时,构成了感知——决策——执行变化系统。其中感知工作环节是指借助光学传感器、红外传感器等传感装置完成周边环境信息的采集,主要采集的信息包括温度、湿度、距离、图像等。决策工作环节是对采集的信息进行多源数据融合分析,并结合实际需求,自动生成控制指令 [1]。指令内容包括路径规划、目标识别等。在执行工作环节,通过伺服机构以及机械结构的配合,完成决策的执行,执行内容包括目标跟踪、镜头角度调整、激光指引等。
比较典型的军用智能装备代表包括无人机、机器人、单兵系统等,这些智能装备的组成部件包括以下四部分:一是传感器部件,主要包括可见光传感器、红外传感器、激光系统等,上述部件原理以及军用场景如表1 所示。
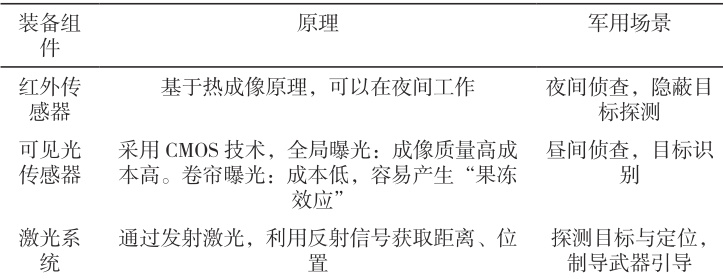
二是智能处理系统,可以实现多传感器采集数据的融合 + 人工智能决策,目前有很多国产化人工智能处理系统产品可供选择,包括华为昇腾AI 处理平台/310B 产品、瑞芯微RK35XX 系列产品等。三是光学部件。通过利用这些光学部件,可以适配传感器波段,进一步提升成像质量。相应的光学部件需要考虑变焦范围、滤光波段、光轴校准精度等参数,更好地保障目标定位的准确性。四是伺服与机械结构。通过伺服系统与机械结构配合,完成决策指令的执行,要求执行操作具备较高的精度,执行机构轻量化,且具有良好的环境适应性。
2 军用智能装备系统设计流程
2.1 设计概述
军用智能装备系统设计相对系统、专业、复杂,本身涉及交叉学科内容,融合了光学工程、人工智能数据处理、机械结构、电子技术等学科知识。在设计时,需要充分考虑诸多要素,包括军用智能装置系统的功能需求、技术可行性、设计成本、装备运行功耗、散热等,并注重做好上述要求的平衡。军用智能装备系统设计会受到一定技术水平的限制,比如相关装置器件算力有限、功能有限等,都会对军用智能装备系统设计智能化水平带来一定影响。
2.2 设计需求
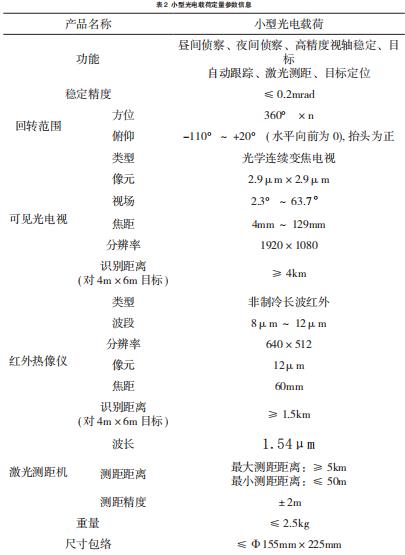
军用智能装备系统设计任务需求包括两大内容,分别是定性描述需求以及定量指标参数。前者的设计需求主要包括军用智能装备的使用环境,具体功能用途,实现目标的定性描述等内容。后者主要包括在实际军用场景中的各种战术指标,如打击作用距离,精度等定性指标要求。在实际设计时,可以以需求调研为依据,参考同类型产品,汇总相关设计参数。以小型光电载荷的为例,可以开展如下定性描述:小型光电载荷针对小型无人 / 有人系统集群应用,以侦察性能提升为核心目标,还应具备较全面的战术功能和较先进的技术指标。在军用场景中,需要具备目标昼间侦察、夜间侦察、高精度视轴稳定、目标自动跟踪、激光测距、目标定位等多种功能,能与多种无人 / 有人小型平台结合,形成小型侦察系统,满足多种任务需求。表2 展示了小型光电载荷定量参数信息。

2.3 系统分解与仿真
智能装备系统汇集了光学设计、机械结构设计、电子技术设计等,需要在对照系统参数指标的基础上进行专业分解。具体来说,包括以下几点:(1)机械结构设计。主要包括军用智能装备的外形与内部结构设计,还需要考虑装备的空间以及重量分配合理性,不同模块的尺寸重量需要进行合理配置,装备的外形尺寸、结构强度需要做好评 还应加强散热设 更好地保障军用智能装备性能充分发挥。(2)电子学设计。主要包括军用智能装备的电路板硬件设计 要明确逻辑驱动、软件算法等关键内容,还需要考虑军用智能装备电机伺服与应用等。电子学部分是军用智能装备系统工作量最大的部分, 需要详细分解硬件电路板设计,做好接口逻辑设计、完成软件驱动、应用算法应用等。(3)光学系统设计。军用智能装备光学系统需要依据传感器设计光路,镜头类型、工艺,光轴等等,保证传感器的清晰稳定。
在军用智能装备系统仿真方面,主要内容包括结构功能仿真、电路功能仿真等。由于不同部件数量较多,需要加强系统级仿真,才能确保军用智能装备设计的合理性,进一步提升军用智能装备的实用性。以结构仿真为例,需要对零件进行 3D 建模,并结合不同零部件功能需求,完成仿真装配以及热仿真等,能确保系统的各零件加工无误,避免干涉或因局部过热导致的不稳定。电路仿真、DRC/ERC 是检验能避免设计低级失误导致系统颠覆性失败,也能确保基本功能可行性。光学仿真也能系统光学设计做初步检验。软件的功能验证也能避免后期风险。
2.4 设计流程
以军用无人机搭载光电吊舱设计为例,需要先明确需求定义,后续还需要进行系统分解设计。本次在需求定义方面,包括以下三种需求:(1)作战场景需求。要求无人机搭载光电吊舱能够支持跟踪侦查目标,实现激光测距,满足多光谱成像需求,适应昼夜以及雾霾、沙尘复杂的气候条件。在飞行载荷方面,要求无人机吊舱总重量控制在 15kg 以内,功耗控制在 45W 以内,吊舱能够抵抗 5Grms 随机振动,使用作战环境温度范围 -40℃—70℃。(2)参数性能指标需求。军用无人机光电吊舱要求光学性能指标可见光分辨率需达到 1080P@60Hz,长波红外热成像分辨率≥ 640×512,激光测距精度 ±0.5 m @1.5 km 远程目标进入系统视场后,通过多光谱瞄准吊舱近红外、短波红外、中波红外等传感器实现对目标探测、识别、捕获与跟踪。通过激光测照器,实现对目标的高精度指示。以地面分辨率要求为依据,在距离100km 时,近红外优于 1.3m、短波 红外优于 5.0 m、中波红外优于 7.5 m。在目标与背景对比度较低时,要求地面分辨率约是像元分辨率的 2.0-3.5 倍。系统焦距的计算可以参考以下公式:

在上述(1)式中, Rg g 代表的是地面分辨率。 l 代表的是目标距离;n 、 a 分 别代表是像元的数量与大小。 代表的是光学系统焦距。无人机光电吊舱采用了红外多光谱相机,时序同步误差要求控制在 1μs 以内,AI 芯片算法延迟控制在 20ms 以内。在轻量化需求方面,无人机光电吊舱采用了碳纤维 + 钛合金复合结构,有效降低机身重量。(3)环境适应性指标需求。无人机光电吊舱需要通过 MIL-STD-810G 冲击测试,防水防尘等级能够达到IP67 级。
在系统分解设计方面,首先是机械结构设计。无人机外形采用流线型启动外壳,有效降低飞行阻力,内部结构按照前后顺序分别集成光学舱、电子舱以及散热舱。整体机械结构进行轻量化设计,采用碳纤维 + 钛合金复合结构框架蜂窝夹层结构,并借助有限元拓扑分析,减少冗余材料,配合3D 打印技术,有效降低无人机机械结构重量。光学舱设计采用了柔性阻尼支架,可以降低无人机非常震动带来的影响。光学舱本身采用了 IP67 级密封设计,可以有效预防空中尘土侵入。在散热设计方面,采用了内置微型热管 + 均温板组合方式,可以有效提升整体系统的热交换率。同时搭配双轴流风机,并在智能温控算法的支持下实现风速智能化条件,有效降低电子器件的温度。
其次在电子学设计方面,无人机光学吊舱装备采用了 FPGA 可编程集成电路芯片,可以实现传感器同步触发以及激光脉冲控制。同时搭载了昇腾 AI 处理平台 ,部署轻量化 YOLOv5 模型,实际运行共患较低,可以满足多类型目标识别的需求。在自适应伺服控制方面,无人机光学吊舱采用了音圈电机驱动反射镜,在模糊控制算法的支持下,有效补偿无人机姿态扰动,保障无人机飞行的平稳性。无人机光电吊舱采用了红外多光谱相机,时序同步误差要求控制在 1μs 以内,结合激光测距点云,可以生产三维地理坐标。红外多光谱相机系统搭载了CMOS 探测器,这种探测装置具有高速、低噪声、高灵敏度以及高动态范围特征[2]。在工作模式方面采用了先积分后读出的工作模式,最大帧频可通过以下公式进行计算:
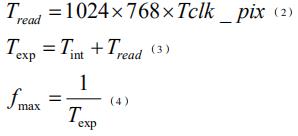
在(2)-(4)式中, Tred 代表的是读出时间。 Tclk _ pix 代表的是像素时钟周期,具体为 7.1ns。 Tint 代表的是积分时间,具体为 500μs。 Texp 代表的是曝光时间,具体为6.084ms。最终可以计算获得探测器最大帧频为164Hz,满足系统150Hz 需求。
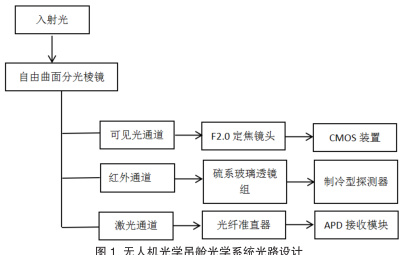
最后在无人机光学吊舱光学系统设计方面,采用自由曲面分光棱镜实现三波段光路整合,具体光路设计如图 1 所示。其中可见光通道配置 F2.0 定焦镜头,搭配 CMOS 装置。红外通道采用了硫系玻璃非球面透镜组,透过率> 90%。激光通道主要负责发射 / 接收激光 [3]。通过光纤准直器与APD 二极管集成,光轴校准误差控制在3μrad 以内。
3 军用智能装备设计关键问题分析
在进行军用智能装备设计过程中,仍需要关注一些关键问题。一是在装备中采用了高性能 AI 芯片,这种芯片在实际运行时,需要较高的算力提供支持,但边缘端装备受功耗、体积等因素的影响,难以满足实际算力需求。二是后续进行多源数据融合的复杂程度比较高。尤其是智能军用装备的可见光、红外、激光点云数据时空对齐比较均能,在进行昼夜成像切换时,很容易导致目标出现丢失问题。 不同类型的数据,需要不同的协议支持,需要进行网络接口需转换设计,才能满足实际需求。在光学系统设计过程中,实际校准精度的难度比较大,尤其是智能军用装备红外与可见光镜头光轴偏移,很容易增加定位误差。针对上述关键问题,后续还需要加强设计,才能进一步提升智能军用装备的性能,使其发挥出更大的军事应用价值。
结束语
总之,智能军用装备设计是一项非常专业、复杂的工作,在具体进行设计的过程中,需要加强对军用智能装备原理的认识,了解装备具体的组成部件,并明确具体的设计流程,包括实际装备的设计需求,并结合实际情况,完成对整个智能军用装备系统的分解与仿真,制定完善的设计流程,还需要加强对军用智能装备设计关键问题分析,才能更好地保障整体设计质量,进一步提升军用装备的智能化水平。
参考文献
[1] 胡友春, 程丽宁. 电气智能装备中视觉自动化的多传感器融合优化[J]. 中国仪器仪表,2025,(05):63-65.
[2] 游绣月 , 唐义 , 张丽君 , 等 . 红外多光谱相机高精度同步控制设计与验证 [J]. 红外与激光工程 ,2024,(11):139-148.
[3] 余子昊, 王栎皓, 汪洋, 等. 卫星激光通信快速反射镜研究进展及发展趋势[J]. 激光与光电子学进展,2023,(15):43-52.
.jpg)
.jpg)
.jpg)
.jpg)