.jpg)
基于 STM32 的水质智能采样系统设计

王万新 沈阳 曹洪奎 王文静
辽宁工业大学 电子与信息工程学院 辽宁锦州 121001;辽宁工业大学 理学院 辽宁锦州 121001
1.引言
本文设计的水质自动采样系统以基于 Cortex M4 内核的 STM32F407ZET6 微控制器为核心,协调控制系统各功能模块实现水样的自动采集、供样和留样以及数据通信功能。控制系统主要由MCU 主控电路、RS485 和RS232 通信电路、高精度A/D 转换电路、开关量信号检测电路、蠕动泵与步进电机驱动电路和开关量输出等电路组成,支持定时定量采样、定流定量采样和等比例采样多种采样方式。系统通过流量计获取采样点的实时流量的模拟量信号,通过24 位A/D 转换芯片SGM58600 实现模拟量信号的采集与转换并传输给MCU 得到实时流量值,来判断是否达到采样条件。通过步进电机驱动蠕动泵实现水样高精度采集。控制系统可通过向多台水质自动分析仪供样并获取水样分析结果判断是否留样。留样单元可将超标水样自动经水样分配单元进行留样存储。控制系统设计有多路外部触发输出信号,用于在采样器供样时触发水质在线检测仪器进行水样检测。在采样结束后,采样数据与留样数据会通过RS485 和RS232 通信接口上传到数据采集仪。本文设计的水质智能采样系统控制系统,实现了水样的自动采集、自动供样和留样功能,同时还能将数据上传到数据采集仪。
2.系统总体设计方案
本文所设计的水质智能采样系统控制系统以 STM32F407ZET6 为核心控制单元,为了提高水质智能采样系统采样的精准度,采用高精度 A/D 转换芯片和微处理器配合以适当的外围电路。为了确保系统各电路的稳定运行,在电路设计中采用了大量的隔离电路与稳压芯片、以及传输保护。在设计时也兼顾了电路的性能与开发的成本。
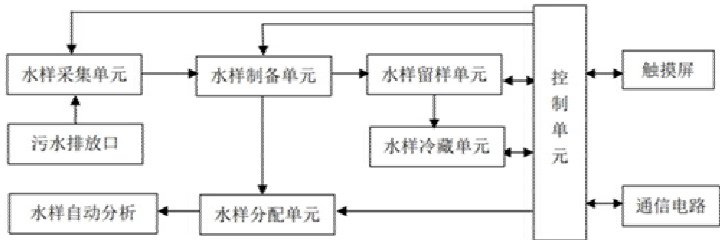
基于 STM32F407ZET6 的水质智能采样系统控制系统的设计主要由高精度 AD 转换电路、步进电机驱动电路、RS485 与 RS232 通信电路、开关量信号检测电路、蠕动泵与步进电机驱动电路、数据存储电路、开关量输出电路以及电源电路构成。系统结构框图如图1 所示。
本设计系统在工作时,模拟量输入单元将采集到的数据传送给控制单元,并判断是否达到采样标准。进行采样时,水样采集单元初步采集水样至水样制备单元,然后向水样分配单元供样。当水样超标时,启动水样留样单元将采集到水样送至留样瓶并冷藏保存。系统的采样参数可以通过触摸屏进行设置。相关采样数据经过RS485、RS232 通信电路将数据传输至数据采集仪,相关管理部门及检测平台的工作人员可以通过登录数据中心,实时掌握水质的变化情况。
3.硬件电路设计
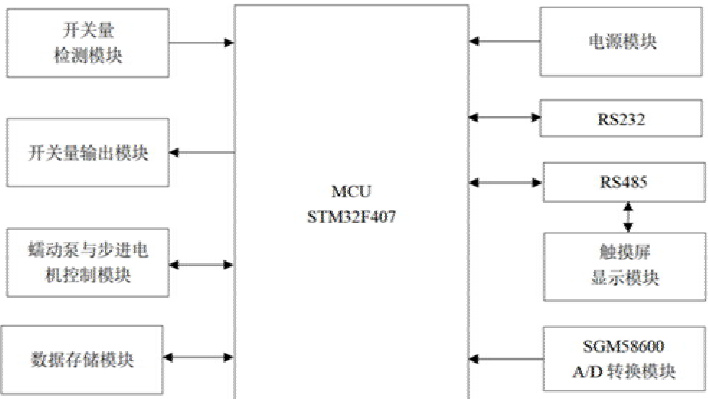
系统硬件可以分为核心控制模块和外围主要功能模块两个部分。控制模块以STM32F407 主控芯片为核心,外围电路主要有高精度 AD 转换电路、RS485 与 RS232 通信电路、开关量信号检测电路、蠕动泵与步进电机驱动电路、数据存储电路、开关量输出电路以及电源电路等。水质自动采样器控制系统的硬件结构图如图2 所示。
3.1 MCU 主控电路
主控芯片是一个系统的核心,必须根据系统的功能要求来定合适的微控制器。选择STM32F407ZET6 芯片。该芯片基于ARM-CortexM4 内核,带有FPU 的,其运行主频可达168MHz,相较于TM4C 系列在性能方面更胜一筹,同时它还具有较低的耗能以及良好的抗干扰能力,外设资源也更丰富,因此便于拓展外围电路。设计STM32F407ZET6 的最小系统电路,包括系统复位电路、外置时钟电路和下载调试接口电路以及MCU 供电电路,这些保证了芯片的正常运行。
3.2 A/D 转换电路
A/D 转换电路对经过流量传感器的输出信号进行采集,进而测到采样点处的实时流量并经过MCU 计算得到水流量。为了提高精准度,采用24 位模数转换芯片SGM58600,可通过SPI 接口对芯片直接进行控制。
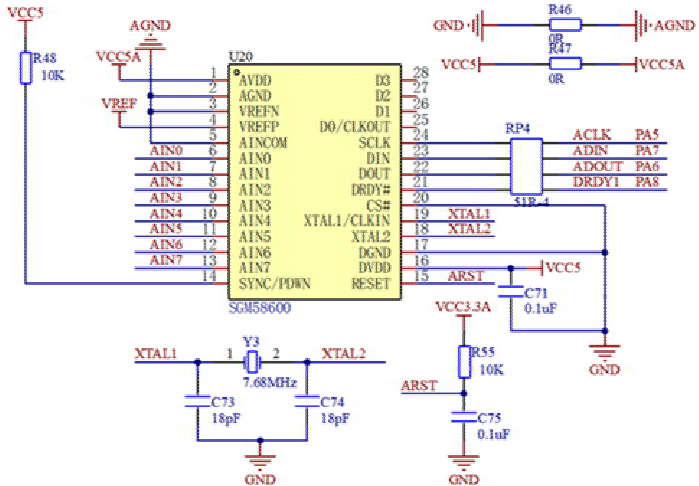
SGM58600 具有可选择的输入缓冲器,增加了输入阻抗,低噪声可编程增益放大器(PGA)以二进制步进提供从 1 到 128 的增益范围。在实际应用中,SGM58600 的主时钟频率一般选取7.68MHz(即 fCLKIN=7.68MHz),其规定温度范围为-40℃至+125℃,具有较高的温度适应范围,满足设计要求。
SGM58600 采用四线制SPI 通信且仅能从机模式工作。在实际使用过程中,AD 转换芯片使用的基准电压,对模拟量的测定结果有着很大的影响。为了尽量减小 A/D 转换的误差,确保转换的精度,SGM58600 芯片的基准电压源的产生选用REF5030 和OPA350 组合产生的3.0V 的基准电压。A/D 转换电路图如图3 所示。
3.3 控制阀驱动电路设计
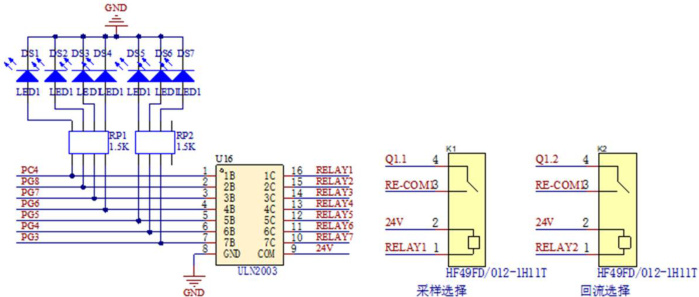
在本文所设计的水质智能采样系统控制系统装置中,有采样选择阀、A/B 采样桶水样选择阀、供样/留样选择阀、供样回流选择阀、A 桶搅拌电机控制阀、B 桶搅拌电机控制阀、A 桶排空阀、B 桶排空阀以及采样电机控制阀等控制阀门,通过各阀门的协作实现水样的各采集流程。但由于主控芯片的控制引脚的驱动能力有限,采用ULN2003 芯片与继电器相结合对各控制阀门进行控制。控制阀驱动电路如图4 所示。
3.4 步进电机驱动电路设计
本设计采用步进电机作为蠕动泵的驱动装置,同时它也是水样留样单元中水样分配器的核心部件,以满足高精度采样留样的需求。步进电机在主控制器的控制下能够实现正转和反转,从而完成抽水和排水功能。由于STM30F407 芯片的I/O 口驱动能力不高,故采用HB541 总线驱动器,该芯片也能够完成总线的电平匹配,提高I/O 口的驱动能力。
3.5 通讯模块电路设计
在工业级水质监测系统的人机交互设计中,采用 RS485 总线构建分布式控制架构。该接口凭借 ± 15V 差分信号范围和 12Mbps 传输速率,可在 300 米距离内实现多节点通信,其共模噪声抑制比显著优于传统 TTL 接口水平。系统配置工业触摸屏作为HMI 终端,通过双绞线传输介质与TPT8485 通信芯片构成物理层链路,有效抑制电磁干扰(EMI)导致的信号失真。
结论
根据《水质智能采样器检测作业指导书》(HJC-ZY99-2022)对系统的各部分功能进行了测试。得出以下结论:本系统设计的水质自动采样器控制系统具有较高的水样采集精度与水样留样精度,同时系统具有高精度的时间系统和模拟量采集与转换,能够进行高精度的时间等比例采样和流量等比例采样功能,系统还可通过通讯电路将系统运行产生的实时数据上传到数据采集仪。实验所测的各项指标误差均满足题目设计要求,这表明水质自动采样器整体工作性能比较稳定,采样精度比较高,运行结果有效可靠,达到设计要求。
参考文献
[1]王玥.基于物联网的水质自动采样系统设计[J].山西电子技术,2021(05):52-54.
[2]唐家伟,王志强,王孟.蠕动泵控制系统设计[J].电气传动自动化,2021,43(02):25-27
[3]陈梦婷.基于 STM32 的水质 COD 检测系统设计与实现[D].湖北工业大学, 2020.
[4]卢亦桐,周民生,黄燕飞.一种多通道模拟量采集方法的软硬件设计[J].信息技术与信息化,2021(12):127-12
9.
[5]李欣丽.水质采样及监测技术的选择[J].环境与发展,2020,32(06):105-106.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)