.jpg)
浅析牵引无人所远程应急操作机器人在无人所处理故障的应用优势

罗秋平
中国铁路南昌局集团有限公司 330000
引言
牵引供电系统是高速铁路系统中的重要组成部分,它从电力系统中获取电能,然后通过牵引变压器将电能转换为适用于电力机车(动车组)的单相电,其额定电压为 27.5kV,频率为 50Hz⨀ 。它主要由牵引变电所、牵引网、分区所、开闭所、AT 所等部分组成 。
一、目前现状
目前国内国外牵引变电所实施大规模无人值守,国外市场出现的是巡检机器人,主要是对设备的巡视,且巡检机器人用于高压室,有固定轨道,安装方式采用高空悬挂,活动区域受限,无人所机器人存在短板。
(一)减少处理故障时间需求
当高铁线路无人所发生远动装置卡死失效、保护装置死机、断路器和隔离开关的电源跳闸等简单的电气设备故障。虽说是简单的故障,但对于检修人员来说,他们处理故障只是几分钟,但是从工区赶到故障所在地也需要好几个小时,遇到特别偏的无人所发生故障时,处理设备故障的时间甚至更久,在短时间出来故障确保正常供电尤为重要。
(二)随时远程掌握无人所发生设备故障时的状态
当无人所发生严重的设备故障时,特别是远动通道中断时,检修人员在不能掌握无人所现场设备状态,对于故障设备的检修方案以及应急处置需要花费大量的时间,大大降低了供电可靠性。但对于简单的设备故障时,例如,运动装置卡死失效、保护装置死机、断路器和隔离开关的电源跳闸这些故障时,机器人小车可以通过摄像头远程操作机械臂处理这些简单的设备状况故障,并对无人所的环境以及设备状况进行监控。
二、牵引无人所远程应急操作机器人设计技术方案及工作原理
(一)整体设计技术方案
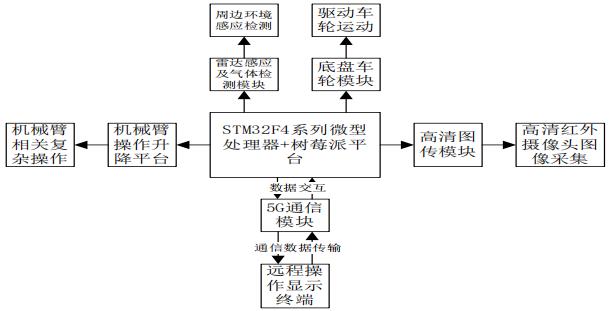
牵引无人所远程应急操作机器人基于基站式无线蜂窝网络云透传局域网技术,利用ARM 平台下的嵌入式STM32 下F4 系列单片机和树莓派平台为主控中心,采用 ROS 开源操作系统,以实现远程图传监控并操作机械臂进行无人所( 分区所、AT 所、开闭所 ) 的远距离下的应急操作。它的技术设计方案包括软件方案和硬件方案;软件方案基于 C 语言编程,硬件方案包括微处理器平台、电源供电模块、机械臂操作模块、底盘车轮驱动模块、红外视觉处理图传模块、自动升降模块、5G 通信模块、气体温度检测模块、雷达感应模块。同时还包括机器人机械设计部分。
(二)机器人机械部分设计
机械臂稳定抓取当中,通过采用基于机械臂逆运动学实现,运用机械臂三维坐标定位对各机械臂进行伸展运动,以及对和设备的简单操作,保证机械臂的操作可靠;在电源供电方式技术上,对采用锂电池采用无线充电方案;在电动升降平台的技术上,机器人由于需要应急操作保护装置及空开,因而需要机器人有足够的高度操作,经研究探讨,使用电动升降平台可以很好地解决升降高度不够的问题,且能自由升降,保证升降高度合适,以保证机器人具有良好的运行稳定性。
(三)整体工作原理
三 牵引无人所远程应急操作机器人实际应用及验证
(一)实际应用场景
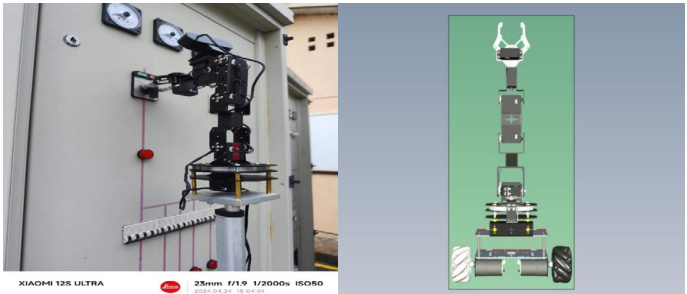
上图是模拟无人所对高压室、交直流屏进行远程巡视,以及远程模拟远动通道失效时对综自屏进行当地分合倒闸操作(图中操作综自屏柜上的万开手柄在设备检修时进行的试验),成功完成机器人小车巡视和模拟倒闸时的一些基本操作。
(二)实际应用效果验证
使用机器人后,可以处理无人所的运动装置卡死失效、保护装置死机、断路器和隔离开关的电源跳闸这些简单故障。最后结合实际调试后,减少处理简单故障花的时间由原来 260 分钟减少至 1 分钟及以内。对比人为处理简单故障时间,优势明显。
四、应用效果总结及建议
1. 当无人所发生设备故障时,通过远程图传监控,机器人机械臂进行应急操作,达到处理简单的设备故障的目的,如保护装置重启、复归,断路器远程实效后,机器人屏控等简单倒闸操作,平均节约2 小时;
2. 预计每年每个所亭节约成本2 万元;
3. 快速切除故障,1 分钟内完成操作,提高高速旅客列车正点率;
4. 人力成本降低:单次故障无需派遣运维人员现场处置,年均可减少人工出勤200 人次以上;
5. 安全性增强:避免人工带电操作风险(如误触高压设备),且机器人可执行高风险环境下的操作(如设备带电但需紧急隔离场景)。
(一)局限性与改进方向
1. 复杂故障(如设备内部元器件损坏)仍需人工干预,未来可结合 AR 辅助诊断技术,提升机器人对复合故障的识别能力;
2. 通信延迟在高负载网络环境下可能增大( >100ms ),计划引入边缘计算节点,实现部分数据处理本地化(如状态识别算法前置至机器人端)。
五、结论
牵引无人所远程应急操作机器人通过融合多模态交互、视觉精准定位与自主作业技术,有效解决了当前“无人值守”模式下简单故障响应时效低、人力成本高的痛点。实际应用表明,该系统可快速响应断路器分合闸、接地操作等典型故障场景,将故障处置效率提升 80% 以上,为铁路牵引供电系统智能化运维提供了可靠的技术支撑。未来随着人工智能与机器人技术的进一步发展,机器人有望拓展至更复杂的故障诊断与处理领域,助力牵引供电系统向“全自主运维”方向演进。
作者简介:罗秋平(1986-) 男,本科,工程师。
项目资金:中国国家铁路局集团有限公司科技研究开发计划项目:(Q2024G010)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)