.jpg)
手持苹果采摘器的设计

田晟材 刘秀敏
湖南涉外经济学院 湖南长沙 410205
Abstract: The apple industry holds an important position in China's agricultural economy. However, for small orchards and those located in mountainous and hilly terrains, due to the high cost of large-scale picking machinery and the incompatibility of the terrain, manual picking is still the main method, which has problems such as low efficiency, high labor intensity, and easy damage to fruits. This study aims to design a handheld apple picker, which realizes efficient and safe picking through mechanical structure innovation. The paper elaborates on the design scheme, working principle and innovation points of the picker, providing a new solution for the mechanization of small orchards and orchards in mountainous and hilly areas where large machinery is not suitable for picking.
Key Words: Handheld; Apple picking; Mechanical design; Small orchard
0 引言
我国是世界上最大的苹果生产国,种植面积和总产量均占全世界的 50% 左右,鲜食消费量和加工消费量逐年增长,苹果出口位居世界前列 [1]。据国家统计局数据显示,2022 年我国苹果种植面积约为 3000万亩,产量达 4757.18 万吨。随着种植面积的不断扩大,果园机械化日益重要。由于现代化大型采摘机器太过昂贵,并且大型采摘机器仅适用于面积较大的果园大规模作业采摘,对于小作业果园及山地、丘陵等地形不适合大型机械采摘的果园而言,考虑到经济效益及地形影响,不得不放弃大型机械采摘这种高效率作业。目前我国的苹果采摘大部分还是以人工采摘为主。单纯的人工采摘不仅效率低下,人工采摘时,胳膊容易被枝条刮伤、擦伤等,在高处工作时,甚至有可能摔倒 [2]。而且不恰当的采摘极易造成果柄脱落,果皮划伤,导致新鲜苹果在随后的贮运过程中发生腐烂。本研究基于实际需求,设计了一种集采摘、接收、长度调节功能于一体的手持苹果采摘器,旨在提升采摘效率、降低劳动强度与果实损伤。这种手持苹果采摘期不仅适用于小型果园及山地、丘陵等地形不适合大型机械采摘的果园,对于分散种植的果树的采摘同样适用。
1、手持苹果采摘器的设计方案
1.1 采摘器采摘方式的选择
从果实分离原理来看,苹果采摘器的核心目标是在最小化果实损伤的前提下,高效地使果实与果柄、枝条分离。最常用的有夹取 - 旋转分离、夹取 - 拉拽分离、剪切分离等机械式分离方式及振动分离、真空吸附分离等非接触式分离方式。不同分离方式的原理及特点对比如表1 所示。
表1 苹果果实分离原理及特点对比
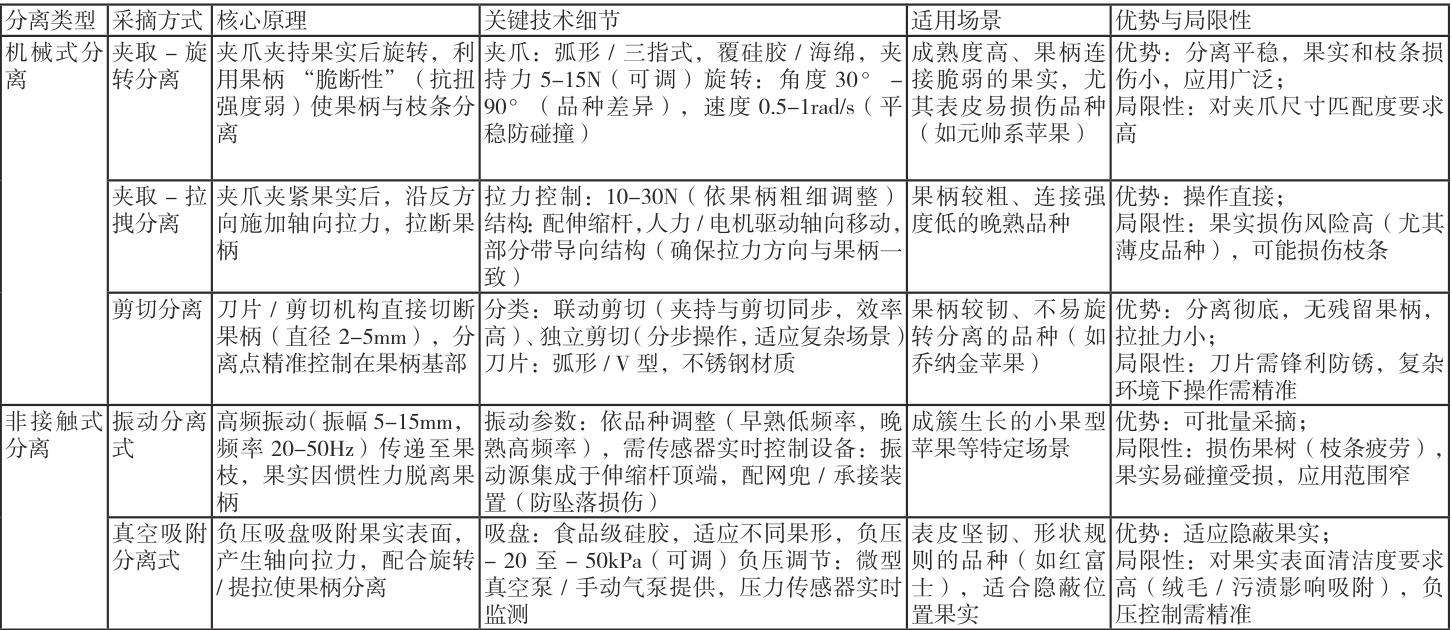
从上表可以看出,对于果柄较韧、木质化程度高(如乔纳金等品种),或因生长环境导致果柄与枝条连接紧密的果实,传统的夹取 - 旋转或拉拽方式易出现分离不彻底、果实损伤(如表皮挤压变形)或枝条拉伤等问题。而剪切分离通过刀片或剪切机构直接作用于果柄基部(直径 2-5mm ),能实现 “靶向切断”,避免对果实的额外拉扯,显著降低表皮损伤风险。且剪切分离结构能灵活应对枝条交错、果柄位置隐蔽等复杂场景,此外,剪切分离后无残留果柄,能直接提升果实商品性,尤其适合对外观品质要求严格的鲜食苹果采摘场景。因此,剪切分离能精准解决果柄特性差异带来的采摘难题,同时兼顾效率与果实保护。使其成为应对多样果柄特性与复杂果园环境的优选方案。
1.2 采摘器设计方案
由顶部的采摘装置自动对苹果果柄进行剪切,极大的降低了人们的劳动强度,提高了采摘效率。采摘器具有长度调节功能,最大采摘高度可达 3m,使得人们无需爬树或者借助梯子就能采摘到苹果,减少了采摘过程中的安全风险,快速采摘,节省了人力和物力,还能提高采摘的效率。设计考虑到,当收集的单果达到一定重量时,如果单果收集装置连接在剪刀下方,一方面会影响到采摘视线;另一方面,由于杠杆原理的作用,需要较大的力来控制操作者的手部动作 [3]。在采摘装置的下方设计开口的苹果接收装置,用于接收采摘下来的苹果至地面上的指定口袋,达到采摘一个,接收一个的目的。
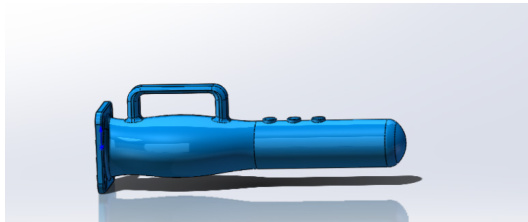
根据以上方案描述,手持苹果采摘器主要由采摘装置、手柄及伸缩杆、接收装置三部分组成,如图 1 所示。
图1 手持苹果采摘器模型图
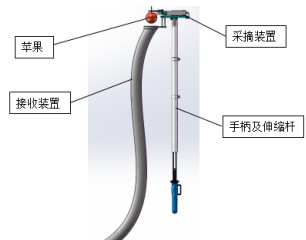
图2 工作流程图
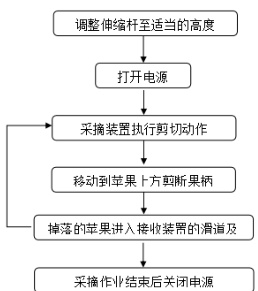
工作流程图如图2 所示,具体工作流程为:
首先根据苹果的位置高低调整伸缩杆至适当的长度,可以先采摘低处的苹果,低处的采摘完后,再采摘高处的。
打开手柄上的电池开关,电池供电,通过传动装置将运动和力传至刀片,刀片执行剪切动作,剪断一个果柄后,移动至另一个苹果上方剪断果柄。
掉落的苹果通过接收装置变径的柔软滑道减速后落入指定的口袋中,达到了采摘一个,收集一个的目的。避免了传统的网兜接苹果的设计,使头部过于笨重,而耗费力气的问题。
采摘作业结束后关闭电源。
2 具体部件设计
2.1 采摘装置的设计
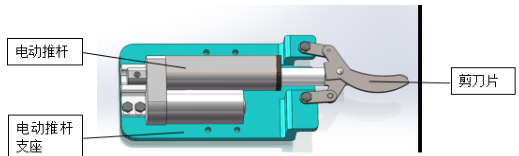
对于剪切装置的设计,需要考虑重量轻,结构简单,不能损伤苹果。采摘装置如图 3 所示,由剪刀片、电动推杆、电动推杆支座及相应的紧固件组成。总长度为 320mm ,重量为 1.5kg 。通过手柄上的电动按钮控制电动推杆向前进行一次往复直线运动,驱动剪刀对苹果的果柄进行剪切。电动推杆选择的是SXTL 升级防水电动推杆,额定电压为12V,额定推力为 1400N,运行速度范围为 7~180mm/s ,运行的环境温度在 -40~102∘ ° C, 防水等级为IP66, 限位开关内置,控制方式为点动 / 自动停,噪音小于等于 56dB,推杆的行程范围为 10~3000mm ,可根据实际需要定制行程为 20mm ,主要材质为铝合金及不锈钢。该电动推杆稳定性能好,适用于本采摘装置。
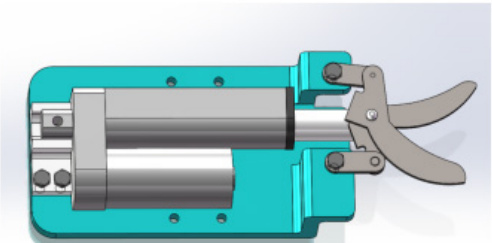
(a)剪刀闭合状态
(b)剪刀张开状态
图 3 采摘装置模型图
采摘装置的刀片选用高碳合金工具钢 Cr12MoV 作为刀片基材,该材料经热处理后硬度可达 HRC58-62,具备高耐磨性与锋利保持性,能长期应对果柄剪切的反复摩擦,同时兼顾一定韧性,避免剪切时因突然受力(如误触树枝)导致崩刃。刀片整体进行氮化处理,形成 5 ~8μm厚的硬化层,显著提升表面耐磨性与抗锈蚀能力(适应果园潮湿环境)。外形采用弧形刀片的设计,能够更好贴合果柄的圆柱形轮廓,在剪切果柄的时候更加顺畅的切入,减少切割阻力,防止果柄打滑,提高效率。刀刃角度设为 25°~30°,锐角设计可以提升初始切入能力,实现 “切口平整、省力切断”。该方案在保证剪切效率的同时,可延长刀片使用寿命至连续剪切 5000 次以上无需打磨,且维护简便(仅需定期涂抹防锈润滑油),符合小型果园的实用需求。
2.2 手柄及伸缩杆的设计
2.2.1 手柄的设计
手柄的设计如图 4 所示,采用了人体工学设计,增强了果农对握把的舒适程度,在一定程度上还能够增强操作的精准度,而且采摘苹果并不是短时间能够采摘完成,该设计能够让果农们更长时间的操作。该表面进行了防滑处理,增加握把稳定性,防止手滑。手柄整体形状更加贴合手掌曲线,减少手掌的疲劳。在材质选择上采用了 ABS 工程塑料,在保证结构强度的前提下,尽量减轻手柄重量,更有利与长期使用。
同时手柄作为动力系统的核心控制单元,集成了电池仓与电源开关。电池仓内置可充电锂电池,为采摘装置的驱动电机提供能源,通过紧凑的内部结构设计,在保证续航能力的同时控制手柄整体重量,避免因过重影响操作灵活性。内置锂电池可以通过配套的充电装置或充电线进行充电,方便果农随时充电,提高了使用的便捷性,而且内置锂电池手柄摆脱了有线连接的束缚,无需担心线缆的缠绕和限制,让果农使用过程中更加自由。而且锂电池放电过程中电压相对稳定,能够更加提高更加稳定的电力输出。相对于外接电池,内接锂电池减少了电池接触不良的问题。电源开关设置在手柄易于触碰的位置,便于操作人员随时启停电机,实现剪切动作的即时控制,减少无效能耗。
图 4 手柄模型图
手柄与伸缩杆采用刚性连接,确保电池的稳定传输。因此,手柄设计通过整合动力控制、人机适配及结构协同功能,成为连接操作人员与设备的核心枢纽,既简化了操作流程,又保障了采摘作业的高效与安全。
2.2.2 伸缩杆的设计
由于苹果的生长高度不同,因此采摘装置的高度也得随之变化,为了更加方便采摘苹果,设计了伸缩杆。伸缩杆承受水果质量,需具有高强度和硬度,还要轻盈,便于手握省力[4]。
伸缩杆的设计由双层同心套管结构和卡箍组成,双层同心套管结构采用内外双层套管设计,结构紧凑,便于伸缩调节。该材质为铝合金,具有优异的耐腐蚀和抗氧化能力,最小直径为 20mm ,壁厚为 2mm ,长度为 0.9 ~ 1.4m,最大采摘高度为 3m 伸缩杆的自重仅1.2kg,在保证强度的前提下,实行了轻量化设计。内杆与外杆之间采用 “卡箍连接” 方式,操作人员可根据苹果高度快速调整伸缩杆长度并固定,操作无需额外工具,简化了采摘前的准备流程。同时,非作业状态下可将伸缩杆收缩至最短长度,减少存放空间,符合 “结构简单、便于携带”的设计目标。
伸缩杆一端连接手柄,另一端连接采摘装置,形成 “手柄 - 伸缩杆 - 采摘装置” 的刚性整体结构。这种设计既保证了动力传输的稳定性,又确保了采摘装置在剪切果柄时的定位精度,避免因杆体晃动影响采摘效率或造成果实损伤。
图5 伸缩杆及卡箍模型图

2.3 苹果接收装置的设计
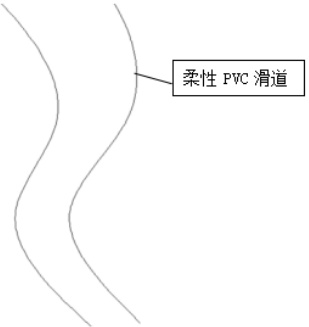
果实的采摘质量、采摘效率很大一部分取决于收集装置 [5]。该接受装置能够精准承接剪切掉下的苹果,上端开口较大能够减少掉落遗漏,用了 3m 的柔性 PVC 滑道能够通过缩口设计让苹果逐渐减速,且柔韧性好,可随伸缩杆长度调整弯曲角度,适配不同采摘高度,表面光滑且耐磨,减少苹果下落时的摩擦损伤,防水防潮,适应果园潮湿环境,不易因水汽变质,成本较低,易于加工成变径结构。
接收装置与采摘装置下方直接连接,整体结构轻便,不影响采摘装置的灵活移动。同时,柔性滑道长度可适配伸缩杆的调节范围,无论采摘高处还是低处苹果,均能确保果实通过滑道平稳落入地面指定口袋,适配小型果园、山地及丘陵等多种场景的采摘需求。
图6 苹果接收装置模型图
3、结论
本手持苹果采摘器的设计,针对我国小型果园、山地及丘陵等复杂地形苹果采摘效率低、人工劳动强度大、安全风险高的现状,提出了一套切实可行的解决方案。通过设计由采摘装置、手柄及伸缩杆、苹果接收装置组成的手持设备,实现了多项核心功能,采摘装置的特殊刀片,可精准剪断果柄并避免损伤苹果;手柄及伸缩杆的可调节结构,适配不同高度采摘需求,消除高处作业风险,带缩口的柔性滑道接收装置,确保果实高效收集且减少损伤。后续将通过田间试验验证设备性能,进一步优化传动系统与材料选型,推动成果转化,为我国苹果产业的机械化升级提供技术支撑。
参考文献
[1] 陈 红,王 倩,高 强 . 我国苹果产业发展及其影响因素分析— 一基于 7 个主产省份的面板数据 [J]. 中国果树,2019(1):92-95 .
[2] 孙 强 ,雷 鸣 ,商益洋 ,孙浩楠 ,李世杰 ,陈怡达 , 许 诚 ,孔祥睿 . 新型水果采摘装置的设计与研究 [J]. Equipment ManufacturingTechnology No.8,2023.
[3] 马质璞 , 张抗 , 谭骥 . 一种新型单果采摘器的设计 [J]. 机械设计与制造 ,2017(5):252-255.
[4] 周建华 李向国 李育鑫 徐铭泽 . 手持便携式苹果采摘装置设计 [J]. 现代制造技术与装备 ,2018(7):1-3.
[5] 吴永金 王涛 刘帆 王良 车晓毅 . 手持背负式水果采摘机的设计[J]. 工 业 技 术 ,2019(22):61-63.
基金项目:2024 年度湖南省大学生创新创业训练计划项目(( 湘教通〔2024〕191 号),项目名称:手持苹果采摘器的设计。
指导老师:刘秀敏
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)