.jpg)
跳频信号自适应干扰抑制算法的性能研究

陈铜 徐海峰 毛利宏 张瑞
新疆理工职业大学 新疆喀什 844000
1 引言
跳频通信因载波频率快速跳变的抗干扰特性,成为军事通信、应急指挥等关键领域的核心技术 [3]。然而,复杂电磁环境下多种干扰交织,传统固定参数抑制手段难以适应动态需求。卡尔曼滤波(KF)、维纳滤波(WF)等自适应算法虽在不同场景展现优势,但受跳频信号非平稳特性与干扰随机性影响,其系统性性能评估不足,导致算法选型缺乏依据。现有研究多针对单一算法或特定场景,缺乏多维度统一评估框架,对跳频信号非均匀驻留特性及复杂干扰环境的适应性分析不足 [4]。为此,本论文针对 KF、WF、LMS、RLS 算法在跳频信号干扰抑制中的性能展开系统性评估,明确各算法在计算效率、收敛速度及抗干扰精度等方面的优势与局限,为优化算法选型提供理论参考。
2 经典自适应抑制算法原理
卡尔曼滤波(Kalman Filter)是一种基于状态空间模型的最优递归估计算法,旨在通过预测 - 校正机制,结合系统模型和实时观测,通过最小均方误差优化估计值 [5]。其预测阶段状态预测模型如式 1 所示。

其中 xk|k-1 表示在 k-1 时刻信息对 k 时刻系统状态的预测值;  为状态转移矩阵;uk 为控制输入;Bk 为控制输入矩阵。
为状态转移矩阵;uk 为控制输入;Bk 为控制输入矩阵。
维纳滤波是一种最优线性滤波器,其核心目标是通过最小化均方误差,设计最有线性滤波器,从含噪声的观测信号中恢复原始信号。WF 有频域WF 和时域 WF 两种形式。频域 WF 适用于平稳随机过程,假设信号和噪声的功率谱已知,则其表达式如式 3 所示。

其中,Pxs( f)表示输入信号与期望信号的互功率谱; Ps(f) 、 Pn ( f ) 分别表示信号与噪声的功率谱。时域 WF 适用于有限长观测数据,解为维纳 -霍夫方程(Wiener-Hopf Equation)如式 4 所示。
wopt=Rx-1rxd (4)
其中, Rxx 表示输入信号自相关矩阵; rxd 表示输入与期望信号的互相关向量。
最小均方(Least Mean Square,LMS)滤波算法是一种基于梯度下降的自适应滤波算法,旨在通过迭代更新滤波器系数,使期望信号与实际输出信号的均方误差最小化。其迭代公式如式 5 所示。
w(n+1)=w(n)+μ⋅e(n)⋅x(n) (5)
其中 μ 为步长因子,控制收敛速度与稳态误差的平衡。 w(n) 为 M 阶滤波器在时刻 n 的权值向量, x(n) 为输入信号向量, e(n) 为误差信号,d(n)为期望信号。
RLS 滤波是一种自适应滤波算法,通过递归更新滤波器权值,最小化加权最小二乘误差。其优化目标如式 12 所示。

其中 w(n) 为滤波器权值向量, d(i) 为期望信号, x(i) 为输入信号向量,λ 为遗忘因子(0<λ≤1),λ 越小,对旧数据遗忘越快。
3 仿真场景构建
本实验构建了仿真评估平台,基于信噪比、均方误差、计算时间、收敛时间、稳态误差等核心指标,对上节提出的跳频通信干扰抑制方法开展系统性验证。
3.1 跳频信号模型与参数设置
首先建立跳频信号的数学化模型。假设有 N 个跳频信号,他们在带宽BW 的范围中进行跳变。

式中,Ai 和fki 分别是第 i 个跳频信号的幅度和频率,ti 是跳频信号在第i 跳的持续时间。
本实验中设计的跳频信号具备宽频离散跳变与非均匀动态驻留特性。其频率集包含 10 个离散频点,覆盖 2800Hz 带宽,可有效分散干扰能量。0.1-0.3s 的动态驻留时间使跳频速率呈现非确定性变化,对算法的频率跟踪速度、参数自适应调节能力提出更高要求。
3.2 跳频信号的信道与噪声模型
在信道及噪声模型构建中,采用高斯白噪声(AWGN)信道模拟实际通信环境中的背景干扰。考虑到跳频信号宽频离散跳变与非均匀驻留的特性,高斯白噪声的功率谱密度设置为均匀分布,覆盖 1100Hz 至 3900 Hz的全频段,以模拟真实场景中无特定频率指向的干扰。

通过动态调整信噪比(SNR)范围(0 dB-20 dB),可系统研究不同干扰强度下自适应干扰抑制算法的性能表现。同时,结合 0.1-0.3s 动态驻留时间带来的跳频速率变化,验证算法在时变噪声环境中的快速响应能力,确保实验结果对算法实际应用场景的有效支撑。
针本小节信号及信道模型,对 RLS、LMS、KF 和 WF 四种算法开展对比实验,验证其在非均匀驻留跳频信号中的干扰抑制性能。
4 实验结果与分析
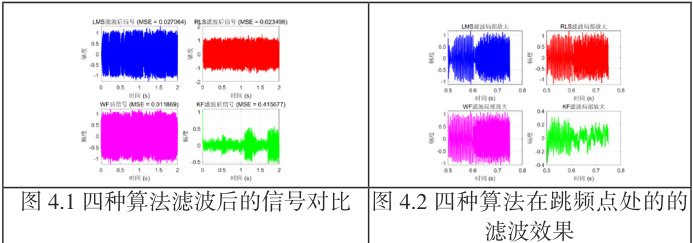
为了便于分析和评估算法对于跳频信号的干扰自适应抑制效果,为初始信号叠加噪声信号。通过对原始跳频信号和含噪信号的波形分析,明确了噪声干扰对信号特征的影响机制。四种滤波算法的对比实验揭示了不同算法在处理跳频信号时的性能差异。这种从信号特性到算法响应的递进分析,验证了各算法的理论优势,为实际通信系统中的算法选择提供了实验依据,四种算法滤波后的信号对比如下图 4.1 和 4.2 所示,其中图 4.2 为四种滤波算法在跳频点处的滤波效果。跳变点处的细节分析进一步揭示了算法在非平稳环境下的动态响应能力。实验结果表明,LMS 在跳变点处表现出显著优势,这为高速跳频通信系统的抗干扰算法设计提供了重要依据。
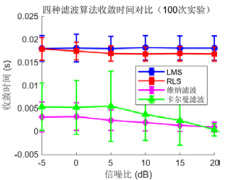
图 4.3 不同信噪比下平均 MSE 对 图4.4 不同信噪比下收敛时间对比比
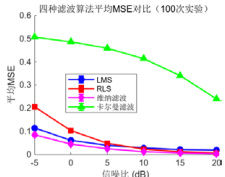
表4-1 LMS、RLS、WF、KF 单次实验对跳频信号干扰抑制的数据
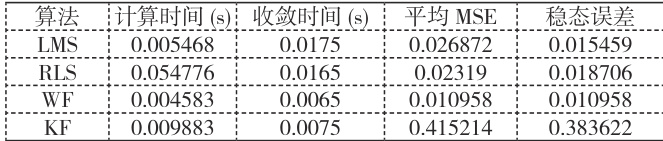
图 4.3 和 4.4 分别为 100 次蒙特卡洛仿真下,四种算法在不同信噪比下平均 MSE 与收敛时间的对比,表 4-1 是单次实验的结果。实验数据显示,四种滤波算法性能存在显著差异。从计算效率来看,WF 与 LMS 耗时较短,KF 次之,RLS 计算复杂度最高。收敛速度方面,WF 收敛最快,KF与 RLS 次之,LMS 收敛相对较慢。在干扰抑制精度上,WF 的平均 MSE 与稳态误差表现最优,RLS 较LMS 有所改善,而KF 受模型准确性影响显著,误差指标明显高于其他算法。
5 结论
本研究通过蒙特卡洛仿真系统评估了LMS、RLS、WF 及KF 滤波在跳频信号干扰抑制中的性能。结果表明:WF 算法整体表现最优,在实验信噪比(-5-20dB)下抗噪声性能表现优异。LMS 算法和 RLS 算法的收敛速度相较于其他两种算法表现更好,在中等信噪比下兼顾稳定性与计算复杂度;卡尔曼滤波需模型优化以适配跳频动态特性。实际应用中,低信噪比实时场景首选 RLS,平稳高噪环境优选维纳,资源受限系统可选用 LMS。本结果为跳频抗干扰算法选型提供了量化依据,未来可探索深度学习与混合架构以进一步提升性能。
参考文献
[1] 苏 萌 . 跳 频 扩 频 通 信 系 统 的 仿 真 研 究 [J]. 计 算 机 与 网络 ,2024,50(04):355-358.
[2] 金赛赛 , 王刚 , 邸荣昊 , 等 . 基于改进去偏转换卡尔曼滤波算法的参数估计 [J]. 舰船电子工程 ,2025,45(05):61-64+70.
[3]Nie R,Li B.Detection and simulation of quasi random frequency hopping signal based on interference analysis Algorithm[J].Neural Computing and Applications,2022.
[4] 袁泽 . 跳频通信系统智能抗干扰技术研究 [D]. 杭州电子科技大学 ,2024.
[5] 陈毅 , 张志军 , 王沛沛 . 基于卡尔曼滤波算法的激光自动对中控制研究 [J]. 技术与市场 ,2024,31(12):8-14.
作者简介:陈铜(1996.5-),男,汉,甘肃白银人,硕士研究生,讲师,研究方向:信号处理。
.jpg)
.jpg)
.jpg)
.jpg)