.jpg)
课赛证融合导向下《工业机器人综合实训》课程教学改革与实践

万蕾 姚兆凤 夏燕玲 陈祺
安庆职业技术学院 安徽 安庆 246003
一、引言
随着全球制造业向智能化、数字化转型,工业机器人技术作为智能制造的核心支撑,其应用场景已从传统工业领域延伸至医疗、物流、服务等新兴领域(引用《“十四五”智能制造发展规划》或相关行业报告)。据 2023 年中国机器人产业发展报告显示,我国工业机器人密度已达 392 台 / 万人,但高技能操作与维护人才缺口仍超 50 万人,企业对“能操作、会编程、懂维护、善创新”的复合型技术技能人才需求尤为迫切[1]。
然而,当前职业院校工业机器人实训课程教学仍面临多重挑战:其一,课程内容与产业需求存在“时差”,部分实训项目停留在基础操作层面,缺乏与行业标准、企业真实任务的深度衔接;其二,教学模式以“教师示范- 学生模仿”为主,学生被动参与,高阶能力培养不足;其三,竞赛与教学“两张皮”现象普遍,技能竞赛的引领作用局限于少数参赛学生,未能转化为常态化教学资源。
本研究以工业机器人技术专业工业机器人综合实训课程为改革对象,基于企业调研与岗位能力分析,重构“课赛证融合”课程内容体系,设计阶梯式任务驱动教学流程,并通过教学实践验证改革成效。
传统《工业机器人综合实训》课程普遍存在以下问题:
(1)内容滞后性。课程内容多基于经典教材,与工业机器人技术应用、工业互联网应用等赛项中的“系统集成、故障排查、工业物联网组网”等前沿技术衔接不足;
(2)场景虚拟性。实训项目多为验证性实验,缺乏企业真实场景支撑,学生难以体验工艺全流程;
(3) 评价单一性。考核以操作规范性为主,未融入“设备联网率”“数据采集准确率”等产业真实评价指标,导致能力培养与岗位需求错位。
二、“ 课赛证融合” 的三维重构
1. 目标重构, 对接“岗课赛证”四维需求
以《工业机器人应用编程 1+X 职业技能等级证书》考核要求为基准,结合工业机器人技术应用、工业互联网应用等赛项标准,将课程目标拆解为三个层级:
基础层:掌握示教编程、PLC通信等核心操作技能,对应 1+X 证书“设备操作”模块;
提升层:具备系统联调、故障排查能力,对应赛项《机器人系统集成》故障处理环节;
综合层:形成“虚拟仿真 - 实机操作 - 产线优化”的复杂工程问题解决能力,对接企业“智能产线运维”岗位需求。
2. 内容重构, 阶梯式任务驱动的教学场景设计
以工业机器人技术应用大赛“谐波减速器装配”赛题为原型,将实训内容转化为四级阶梯任务,如表 1 所示,实现“从单一技能到综合能力”的递进培养。
表1 阶梯式任务驱动的教学场景设计
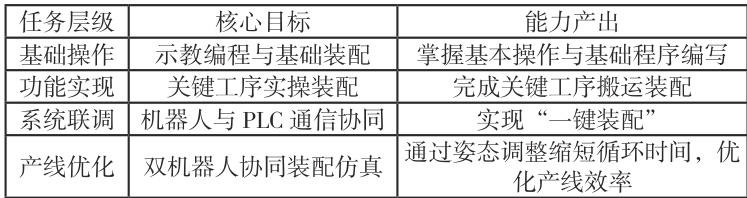
任务难度随层级递增,前一任务为后一任务提供技能储备,同时融入企业真实工具(如西门子 PLC、RobotStudio)与赛项标准,确保教学内容与产业需求同频。
3. 模式重构:“三阶教学法”的实施路径
基于“做中学”理念,构建“竞赛工单导学 - 虚拟仿真试错 - 实境攻坚达标”三阶教学模式:
竞赛工单导学:以赛题拆解的任务工单为引导,学生通过工单中的“知识要点”“操作步骤”“常见问题”自主学习,教师重点讲解“系统集成”“故障排查”等难点;
虚拟仿真试错:利用 RobotStudio 搭建虚拟产线,学生在仿真环境中调试“双机器人协同装配”程序,通过软件自动反馈的“循环时间”“碰
撞检测”结果优化方案,降低实机操作风险;
实境攻坚达标:在真实工业机器人与 PLC 设备上验证虚拟方案,引入赛项评价标准,通过“实境操作 - 数据反馈 - 二次优化”完成达标考核。
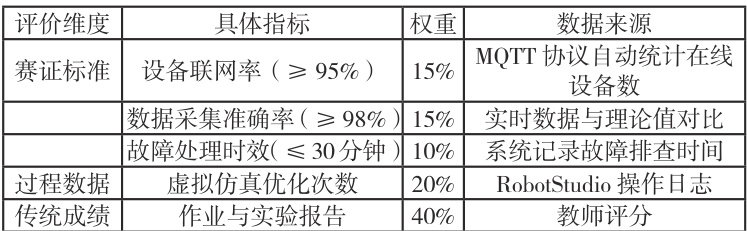
4. 评价重构:赛证标准嵌入的多元评价体系
突破传统“操作 + 报告”的单一评价,构建“赛证标准 + 过程数据 + 传统成绩”的三维评价模型,权重分配如表2 所示。
表2 评价体系权重分配表
三、实施效果与反思
1. 阶段性成效
学生能力提升。2024 年学生获省级以上技能竞赛奖项 8 项, 1+X 职业技能等级(中级)证书通过率 100% ,显著高于全省平均水平;
教学资源开发。开发“赛题解构库”“故障案例库”“微课资源库”等教学资源;
教师能力升级。团队教师通过“训练 - 参赛 - 教学”机制,获省级教学能力大赛一等奖 1 项、二等奖 1 项,双师认证覆盖率提升至80% 。
2. 现存问题与改进方向
课赛融合深度不足。部分任务仍存在“贴标签”现象,需加强教师企业实践,深化对新技术应用场景的理解;
学生参与度差异。部分学生因基础薄弱难以完成高阶任务,需依托学习平台数据开发“分层任务包”,提供个性化学习路径;
实训条件限制。受经费制约,工业互联网综合应用实践中心建设滞后,下一步将推动与企业共建“智能工厂实践基地”,实现“虚拟验证- 实机操作- 数据反馈”闭环。
四、结论
《工业机器人综合实训》课程改革以“课赛证融合”为核心,通过阶梯任务设计、三阶教学模式与多元评价体系,有效解决了“教学内容滞后”“场景虚拟”“评价单一”等问题,为职业院校工科实训课程改革提供了“对接产业 - 融入赛证 - 能力递进”的实践范式 [2]。未来需进一步深化企业参与,完善分层教学机制,推动实训课程与产业需求的深度融合。
参考文献
[1] 张倩 . 工业机器人在制造业中的应用现状与未来发展趋势 [J]. 模具制造 ,2025,25(07):25- 27.DOI:10.13596/j.cnki.44- 1542/th.2025.07.008.
[2] 李银桃 .“ 工业机器人多工作站联调” 课程一体化教学改革对策探析 [J]. 中国设备工程 ,2025,(13):208- 210.
[3] 张明远, 李华强. 高职院校工业机器人技术专业课程体系优化研究 [J]. 职业教育研究 , 2022, 15(3): 45- 52.
作者简介:万蕾(1989- ),女,江西南昌,讲师,硕士研究生在读,研究方向:机器视觉检测、仪器仪表技术。
基金项目:安徽省级质量工程项目《技能竞赛背景下的工业机器人技术专业课程教学优化研究- 以安庆职业技术学院为例》(项目编号:2023jyxm1492);
安徽省级质量工程项目《基于创新能力培养的高职工业机器人技术专业课程教学改革研究与实践》( 项目编号:2024jyxm1069);
安徽省高校自然科学研究项目《基于深度学习和三维点云的指针式仪表自动读数识别技术的研究》(项目编号:2024AH051154);
安徽省高校自然科学研究项目《DNA 遗传算法在机器人轨迹路劲优化的应用研究》(项目编号:2023AH053080)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)