.jpg)
基于AI 视觉识别的智能采摘车系统设计

李东轩 翟悦 孙绍涵
大连科技学院 信息科学与技术学院 辽宁 大连 邮政编码 116000
1 目的与意义
我国作为农业大国,果园种植产业的现代化升级需求,正驱动果园采摘车技术的创新突破与产业化进程。本文针对农产品采摘特点设计自动化采摘装置,引入 AI 视觉识别技术,利用采摘机器人成像装置识别目标图像,研究智能采摘车分拣控制方法,通过视觉识别的网络算法构建,赋予智能采摘车精准的环境感知、目标识别与空间定位能力,通过计算调整采摘车机械臂位姿,完成目标分
拣动作。本文设计基于 AI 视觉识别的智能采摘车系统,通过机器视觉驱动自动化控制采摘,提升了农产品采摘效率,有效解决农业采摘中劳动力短缺问题。
2 智能采摘车整体设计
本文基于 AI 视觉识别和计算机远程操作模式,设计了一款双目视觉定位的智能采摘车。智能采摘车主要包括双目视觉识别系统、采摘主控系统、采摘机械臂系统、行进系统和收集系统五部分。应用三维建模软件设计的智能采摘车如图 1 所示。
图 1 智能采摘车整体结构图
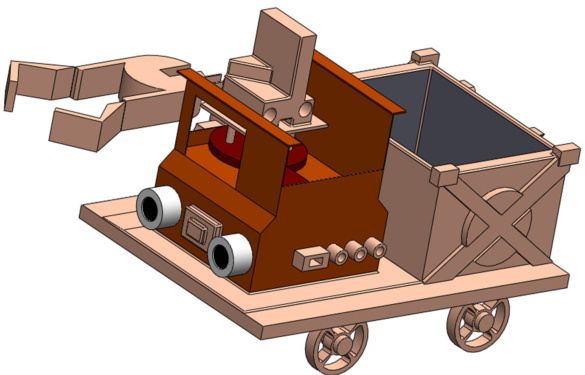
该智能采摘车工作原理如下:首先,在双目视觉
别系统确定采摘目标位置后,主控系统控制行进系统和机械臂动力系统运动,实现采摘姿态调整;机械臂运动到采摘目标处完成采摘操作后转移到采摘车收集仓中。
3 智能采摘车系统结构设计
3.1 系统总体结构
基于 AI 视觉识别技术的采摘车自动化控制系统从下至上包含采集层、传输层、控制层、应用层。采集层负责实时获取智能采摘车的工作状态及环境感知数据。传输层负责打通控制系统与智能采摘车间的全双工通信链路。控制层部署视觉识别的数据处理与决策网络算法。应用层执行控制指令并驱动底盘转向系统、采摘车上机械臂各关节等底层硬件,驱动采摘车按规划路径行进,完成采摘臂空间定位与果实抓取动作。
3.2 系统硬件设计
系统采集层的硬件主要由双目摄像机、存储卡和辅助电路等,选用联想智能双目云台双目摄像机,它模拟人眼从不同角度观察物体形成视觉差,同步捕获图像,以此感知环境与目标信息,存储卡记录处理的图像数据,助力采摘车精准采摘。系统控制层的硬件采用微芯科技ATSAMV71Q21B 集成电路芯片作为系统微控制器。控制系统应用层部署电机驱动模块,用于驱动农业采摘车行走装置、机械臂关节以及末端执行器运行。系统控制层的微控制器采用优化的 YOLOv9 模型控制农业采摘车的运行动作,通过改进网络结构、损失函数和池化模型学习识别目标的最佳尺寸。
3.3 改进的 YOLOv9 网络结构
为降低神经卷积网络计算成本,引入 Ghost 模块,结合基础与深度卷积并堆叠连接输入输出,用 BN 与 ReLU 调控通道数,后激活策略适应传输。在 CSP 架构中应用于上分支残差结构,经融合等操作优化。在 YOLOv9 网络中,创新引入动态空间金字塔池化(DSPP, DynamicSpatial Pyramid Pooling)模块替代传统 SPP 结构,通过多尺度特征动态融合机制显著提升了目标检测性能。该改进针对传统 SPP 模块在固定池化尺度下易丢失小目标特征的问题,设计了四尺度动态池化结构。采用 YOLOv9 动态 GIoU-CIOU 动态损失选择机制,精确反映框间距离,增强回归稳定性,解决不重合问题。
4 智能采摘车系统仿真分析
对视觉识别定位、采摘主控系统计算、采摘车行进、调整采摘机械臂姿态采摘、运送收集采摘过程进行仿真。在一次采摘过程中采摘系统首先通过目标识别,调整行进系统,在判断是否达到目标位置后,调整采摘机械臂姿态,控制机械臂进行采摘,然后机械臂的夹持装置将采取物送至收集仓内,判断收集仓是否满载,完成一次采摘任务。
5 结论
本文研究了一种基于 AI 视觉识别的智能采摘车,该采摘车由五部分构成,通过搭载的双目视觉摄像机系统,加上基于 Yolov9 深度学习算法训练的采摘目标识别 , 能够满足采摘车行走中的识别定位,从而使小车完成位置校准,实现准确行走;同时能够识别成熟目标所在准确位置控制机械臂完成采摘。该系统能够满足实际采摘的需要,具有较好的实用性。
参考文献:
[1] 汪天韵, 王吉平, 袁昕, 等. 智能蓝莓采摘机器人设计与应用[J].工程机械 ,2025,56(06):150- 153+ 13.
[2] 翟悦 , 王璨 , 孙建言 . 一种改进的基于 N- List 的频繁项集挖掘算法 [J]. 计算机应用与软件 ,2018, 35(09): 67- 72.
[3] 翟悦 , 李楠 , 于文武 . 基于扩展概念格的带约束关联分类规则挖掘方法 [J]. 交通大学学报 ,2021, 42(04): 88- 93.
[4] 翟悦, 秦放. 基于大数据技术的“ 三位一体” 智慧养老服务评价体系构建 [J]. 中国市场 ,2020(27):185- 186
[5] 翟悦, 计美娇. 大数据环境下养老服务模块化与关联分类研究[J].农村科学实验 ,2020(9):123- 124
作者信息:
姓名:李东轩,出生年月:2004.07,男,汉族,籍贯:省鞍山市,
所在院校:,在读本科,研究方向:软件工程姓名:翟悦,出生年月:1984.10,女,汉族,籍贯:省抚顺市,所在院校:,职称:教授,学历: 研究生,研究方向:数据挖掘、人工智能姓名:孙绍涵,出生年月:20030.07,男,汉族,籍贯:省锦州市,所在院校:,在读本科,研究方向:软件工程项目来源 : 本文系大学生创新创业训练计划项目;项目名称:智慧采摘助手—基于AI 视觉识别的果园智能采摘车研究成果
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)