.jpg)
多传感器融合与智能算法驱动的智能导盲杖系统设计与实现

代文豪 吴焰红 刘星 张新 冉建红
重庆工程学院 重庆市巴南区 401320
中图分类号:TP212.9;TP18
0 引言
随着物联网技术与智能算法的发展,多传感器融合为智能导盲杖提供了技术支撑。本系统以传统盲杖为载体,通过摄像头、超声波、GPS 等传感器协同感知环境,结合图像识别、路径规划等智能算法,解决视障群体“ 认路难、避障难、求助难” 问题,为无障碍出行提供创新方案。
1.整体方案设计
1.1 系统架构
系统采用 “ 感知层 - 控制层 - 传输层 - 应用层” 四层架构,实现环境感知、数据处理、信息交互与功能应用的全流程闭环:感知层:通过摄像头、超声波传感器、GPS 模块、心率传感器等采集路面图像、障碍物距离、位置信息及用户状态数据[1]。
1.2 核心功能设计
功能系统的设计包括了对盲道识别模块的设计、对障碍物预警模块的设计、对紧急呼叫功能的设计、对无线寻杖功能的设计以及远程监护系统的设计等。特别是在如何实现各功能模块的高效协同与精准响应,这是由于视障群体出行场景复杂多变,因此需要对各功能的可靠性和实时性进行重点设计,以及算法的优化升级等[2]。而对于交互系统,这部分是涉及到将处理后的信息以语音、声光等形式反馈给用户的执行装置。
2. 系统设计
2.1 硬件设计
本项目硬件系统采用模块化设计,各模块通过标准接口与主控芯片连接,确保稳定性与可扩展性。各模块通过 GPIO、UART 等标准接口与ESP32 连接:摄像头经 DCMI 接口传输图像,超声波模块通过 GPIO 触发测距,GPS 与 GSM 通过 UART 传输数据,NRF 模块采用 SPI 通信[3] [4]。硬件结构。
针对单一传感器局限性,采用多传感器数据融合算法[4]:通过 ESP32定时器统一校准各传感器采样频率(摄像头 30fps,超声波 10Hz ,GPS1Hz)完成时空同步。盲道识别提供局部路径,GPS 定位规划全局路线。超声波检测远距离障碍物,红外补充近距离( <20cm )细小障碍检测。异常处理方面,当某传感器数据异常(如 GPS 信号丢失),自动切换至冗余传感器(如 Wi-Fi 辅助定位)。。
2.2 算法设计
RGB 转 XYZ 的公式:
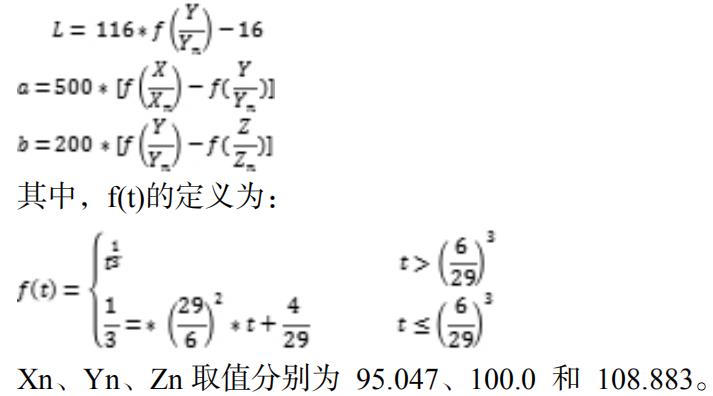
灰度腐蚀操作定义:假定 f(x,y) 是输入图像, b(x,y) 是一个子图像函数,并且它们都是离散函数[5]。
3.功能测试
3.1 测试场景与方法
选取城市街道、公园、室内走廊等典型场景,在晴天、阴天、夜晚等不同光照条件下,对系统核心功能进行测试。
3.2 测试结果
测试结果显示,系统在正常光照下盲道识别准确率达 95% ,阴天降至88% ;障碍物检测响应时间 ≤0.5 秒,漏检率 <1% ;GPS 定位误差户外≤5 米,室内 ≤10 米;紧急呼叫成功率 100% ,NRF 寻杖有效距离 ≥30 米。
4.总结
本系统通过多传感器融合与智能算法,实现了盲道导航、障碍物预警、紧急呼叫等核心功能,解决了视障群体出行中的关键问题。相较于现有产品,其创新点在于:多传感器协同提升环境适应性,智能算法优化识别与定位精度,软硬件结合构建完整辅助生态。
参考文献:
[1] 腾浩,武涛,王德帅,等。导盲杖研究现状及分析 [J]. 中国机械工程学报,2023, 06:50-57.
[2] 陶文元。基于可穿戴传感的人体跌倒行为检测研究 [D]. 电子科技大学,2020.
[3] 徐一皓。基于 LoRa Mesh 的室外定位系统设计 [D]. 浙江大学,2023.
[4] 唐建军,周阳。利用加速传感器估算竞走运动员的步长与步频 [J].河南师范大学学报 (自然科学版), 2019, 47 (03):118-124.
[5]李洪飞。基于深度学习的毫米波雷达非接触心率检测技术研究 [D].烟台大学,2024.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)