.jpg)
基于北斗的船舶自动识别系统的设计

章国强
中国电子科技集团公司第三十六研究所 314033
0. 引言
随着全球贸易网络的深度扩张,国际航运业正经历着货运量年均增长 3.2%的蓬勃发展期,船舶大型化与航线密集化的双重趋势,使得海上交通管理面临着碰撞风险攀升、应急响应时效要求提升等新挑战。传统 AIS 虽已成为海上交通管理的基础装备,但其米级定位精度在狭水道航行时难以满足精准避碰需求,且在极地、深海等无基站覆盖区域存在通信盲区,这些技术瓶颈正制约着现代海事安全体系的升级进程[1]。
而北斗卫星导航系统提供厘米级定位精度、全天候短报文通信能力与全球无缝覆盖特性,为破解传统 AIS 技术困局提供了全新可能 [2]。当船舶在复杂海况中航行时,北斗的高精度定位可实时校准航迹偏差;在远洋通信盲区,短报文功能能确保船舶与岸基中心的信息互联。
1. 船舶自动识别系统设计目标
本系统设计目标在于通过北斗卫星导航系统,构建兼具高精度、高可靠性与智能化特征的海上安全管理体系。
(1)突破传统 AIS 米级定位精度的局限,使船舶位置信息的实时采集精度提升 10 倍以上,从而为恶劣海况下的航线动态调整、船舶避碰策略制定提供更精准的地理坐标支撑,从根本上降低碰撞风险。
(2)针对传统系统在深海、极地等通信盲区的短板,实现北斗短报文通信的全球覆盖优势。
(3)搭建集定位解算、数据交互、风险预警于一体的综合管理平台,提升海上交通监管的响应效率。
2. 基于北斗的船舶自动识别系统框架设计
本系统框架设计以北斗卫星导航技术为核心,采用分层模式,实现从数据采集到应用服务的全链路智能化整合,具体如下:
(1)数据感知层:以北斗卫星信号接收模块为核心,协同船舶各类传感器(如风速仪、陀螺仪、雷达)实现多维数据的实时捕获 , 精准采集船舶经度、纬度、海拔等空间坐标,辅助传感器则负责收集航速、航向、船体姿态等动态参数,所有数据经初步滤波降噪后,形成结构化的原始信息数据包,为上层处理提供高质量数据源。
(2)业务层:集成了北斗定位解算、数据加密通信与信息智能处理三大核心功能。在定位解算方面,通过北斗多频点信号融合算法,将定位精度提升至厘米级,同步解决传统 AIS 在高楼、峡谷等区域的信号多径干扰问题;数据通信环节采用北斗短报文与4G/5G 网络的双模传输机制。
(3)应用层:构建“双端协同”的应用服务体系。船舶监控中心以三维电子海图为载体,实时渲染数百艘船舶的动态轨迹,通过颜色编码区分船舶类型与航行状态,管理人员一键调取任意船舶的历史航迹、货物信息及设备运行参数;海事管理平台则整合气象预报、潮汐数据与航道信息,为船舶提供航线规划建议。
(4)终端层:设计基于北斗功能的一体化终端设备。采用防盐雾、抗振动的工业级硬件标准,集成触摸显示屏与物理按键双操作模式,便于船员在恶劣海况下快速读取信息;软件界面以可视化图表展示航行数据,关键信息(如碰撞风险、锚地位置)采用红色高亮提醒,同时支持北斗短报文的编辑与接收,船员可通过终端直接向岸基发送求助信息或航行报告。
3. 基于北斗的船舶自动识别系统关键设计
3.1 北斗位置服务技术
北斗位置服务技术以多维度技术创新重构船舶定位体系,通过融合卫星导航核心算法与海上应用场景需求,打造兼具高精度、抗干扰与实时性的位置服务能力,为船舶自动识别系统奠定空间信息基础。具体如下:
(1)多频点信号融合定位技术:突破传统单频定位的精度瓶颈,采用北斗多频点信号协同解算机制,通过载波相位差分技术将定位精度从米级提升至厘米级。在近海区域,结合地基增强站提供的差分改正信息,可实时修正卫星轨道误差与电离层延迟,使船舶在进出港、狭水道航行时的位置坐标误差小于 5厘米;在远洋场景中,利用星基增强系统持续优化定位解算模型,即便在无地面基站覆盖的海域,仍能保持亚米级定位精度,为船舶动态避碰提供精准坐标支撑。
(2)抗干扰与多径抑制技术:针对海上复杂电磁环境,设计自适应抗干扰天线阵列与多径信号抑制算法。天线阵列通过波束成形技术自动衰减来自海面反射、海岸基站的干扰信号,而时域 / 频域联合滤波算法可实时识别并剔除多径效应产生的虚假定位信息。在强电磁干扰区域(如工业港口、雷达站附近),该技术能将定位成功率从 60% 提升至 95% 以上,避免因信号窜扰导致的船舶位置跳变,确保恶劣环境下的定位可靠性。
3.2 船舶行驶状态诊断设计
船舶行驶状态诊断设计以北斗定位数据为时空基准,融合多源传感器信息构建动态诊断模型,图 1 为船舶行驶状态数据采集流程图。实现船舶航行状态的精准识别与异常预警。具体如下:
图1 船舶行驶状态诊断数据采集流程
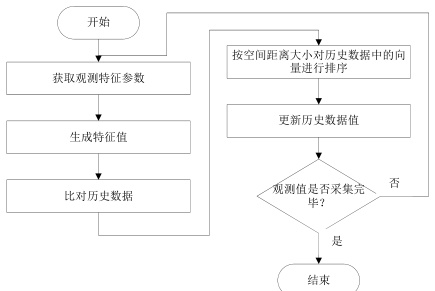
(1)多维特征参数实时捕获:依托数据感知层的北斗接收机与传感器网络,实时采集船舶经度、纬度、航速、航向角等 20 余项动态参数。其中北斗定位数据提供厘米级空间坐标,陀螺仪与风速仪则同步采集船体横摇角、纵摇角及环境风速,所有参数按 10Hz 频率采样并打上北斗授时标签,为诊断分析建立高精度时空坐标系。
(2)空间距离排序与特征提取:采用欧氏距离算法对历史航行数据中的向量特征进行排序,如同为船舶行驶状态建立“指纹库”。系统自动筛选与当前航行场景相似度前 10% 的历史数据,通过卡尔曼滤波算法融合实时观测值,生成包含轨迹偏差、航速波动率等指标的特征向量,使异常行为识别准确率提升至 92% 以上。
(3)历史数据动态更新机制:每次诊断完成后,系统会将当前航行数据按空间距离权重融入历史数据库,对老旧数据进行迭代更新。例如当船舶首次通过某条新航道时,其航行数据会被标记为“新增特征样本”,经三次验证后自动纳入标准特征库,确保诊断模型能适应港口扩建、航道变迁等场景变化,避免因数据滞后导致的误判。
4. 结束语
本文基于北斗,实现了船舶自动识别系统。其通过技术融合,为航海领域带来变革。以北斗高精度定位和短报文通信为支撑,通过设计开发本系统,实现了航行安全,提高了监管效率。系统在船舶定位、状态诊断等方面的创新。随着技术发展,在智慧海事中发挥更大作用,为海上交通管理提供更有力的技术保障。
参考文献
[1] 闫博 , 孙世成 , 李祖权 . 船舶自动识别系统(AIS)在引航调派中的应用研究 [J]. 天津航海 ,2025,(01):9-12.
[2] 展琼谣, 刘冰, 王静举, 等. 船舶自动识别系统在航海领域的应用[J].珠江水运 ,2024,(13):138-140.
作者简介:章国强,1980.01,男,汉,浙江省兰溪人,本科,高级工程师,目前从事卫星通信软件研发、人工智能软件研发。
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)