.jpg)
便携式智能索缆安全保障装置

刘宇烁 郎庆阳 赵亮 李心如 庞钊铭 李敬丽 曲福有
辽宁科技学院
引言
现代社会对基础设施安全运行的要求日益提高,尤其是在严寒地区,索道、输电线路等缆索类结构常因结冰问题导致断裂、导电故障、结构损伤等严重后果。现有除冰方式存在效率低、依赖停电、作业风险高等问题,制约了其广泛推广应用。针对这一背景,团队设计出一种能够自主移动、远程操作并具备高适应性的便携式智能索缆安全保障装置,为解决该领域技术瓶颈提供了全新方案。
一、装置设计理念与系统组成
1.面向多场景的除冰需求构建理
索缆设施在交通运输、能源传输、登山滑雪设备等多个领域中广泛应用,在低温高湿等自然条件下极易发生结冰现象。结构受力不均、冰重过载、导电故障等问题会显著降低索缆系统的安全稳定性。人工除冰常受限于作业环境,存在高空坠落、操作疲劳、作业周期长等高风险问题。传统机械除冰设备多为单一功能模块设计,存在适用索径单一、攀爬能力弱、操控方式滞后等问题。便携式智能索缆安全保障装置的设计目标是构建具备自适应夹紧、纵向移动、主副除冰、视觉识别、远程操控等集成功能的多场景应用平台,解决传统方式覆盖盲区、除冰不彻底、响应不及时等技术短板。装置框架构建以通用性和可扩展性为核心。平台模块需满足不同索缆直径、倾角和材质环境下的运动与作业需求。团队在分析典型悬索桥电缆冰层数据后,确立20mm 至50mm范围的索缆夹持结构需求标准,并结合学生在创新实践项目中制作的夹紧轮组模型原型,展开了系列实验论证。装置可适配多类缆体横截面,在 25 度以上斜率条件下完成全程自动行走。系统设计中融入轻量化支撑结构,借助3D 打印技术制作 ABS 非标壳体,有效降低结构重量与加工成本。
2.结构功能模块化设计策略
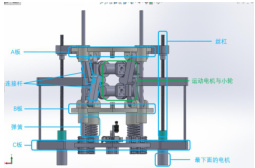
整体结构划分为五大模块:运动模块、主冰刀模块、副冰刀模块、视觉监控模块、远程控制模块。运动模块由丝杠、电机、AB 压板组、限位传感器等构成,具备自适应夹紧与动态平衡能力。主冰刀模块通过大齿轮驱动阿基米德螺线轨迹的圆弧滑道,在主电机驱动下实现刀刃绕缆对冰的切削。副冰刀模块设置于主刀组下部四个方向,采用弹簧复位的旋转式小刀结构清除薄冰碎屑。视觉模块由高清微型摄像头与图传系统组成,能够将作业现场视频实时回传。远程控制模块通过ESP8266 模块连接Arduino 主控单元及KY-019 继电器阵列,控制电机正反转及轮组运动。设备所有控制电路统一封装于主控板壳体中。为提升作业实时性,系统通过多线程方式运行电机响应程序、视频传输程序和远程指令程序。控制模块中核心板为 Arduino UNO,主控程序内含定时中断机制与状态识别模块,能根据限位器信号精确判断装置在索缆上的行走状态,并动态调节夹紧力度与电机功率输出。
3.工艺实现与可维护性优化路径
结构件制造采用标准件结合3D 打印加工方式。夹紧板、连接杆、丝杠螺母等为标准工业件,刀组外壳、外覆套筒等为自定义件,利用SolidWorks 建模后导出为STL 格式文件,在教学3D 打印平台完成零件加工。学生按照装配图纸逐步完成零部件对接,通过螺丝固定、电缆穿线、控制板焊接等流程完成主体构建。视觉监控组件通过铰接支架安装于顶部平台,视角可根据索缆宽度手动调节。装置结构设计注重可维护性,主要零部件可快速拆卸与替换。螺丝固定方式统一采用内六角结构,便于携带维修工具完成野外快速维修任务。控制模块配有过压保护与热敏保险设计,降低电流波动对电路的冲击风险。刀组转动部分加装防滑链条,延长电机寿命并提升冰面切削稳定性。实训过程中,学生结合仿真实验平台进行多角度参数调试,并在不同坡度索缆模型上开展全天候试验,装置运行稳定,反应迅速。
二、关键功能模块结构分析
1.自适应运动模块的结构机制
运动模块作为整机运行的核心基础,决定了装置是否能够稳定附着于不同角度与直径的索缆上进行移动。该模块主要由电机驱动丝杠、联动夹紧机构、限位控制装置组成。夹紧结构依托AB 板和弹簧压缩原理构建夹持力矩,通过丝杠驱动使A 板下压,连接杆内收,将上层平台牢固压附于索缆表面。结构触发限位器后,电机停止输出,装置实现夹持自锁。在设备调试过程中,通过3D 打印成型制作夹紧模块支架,由学生独立完成STL模型修正及结构受力仿真。平台设计能够自动适配 20mm 至50mm 直径缆索,配合八组轮组电机同步驱动,装置可稳定在倾角达 90 度的索缆上连续运行,表现出良好的工程适应能  运动模块的夹紧装置考虑到索缆不同表面材质的摩擦特性,采用加厚橡胶垫片缓冲接触面,减缓刀组加载时的结构振动。丝杠材料选用耐磨性较强的不锈钢,保证长时间运行下的机械稳定性。
运动模块的夹紧装置考虑到索缆不同表面材质的摩擦特性,采用加厚橡胶垫片缓冲接触面,减缓刀组加载时的结构振动。丝杠材料选用耐磨性较强的不锈钢,保证长时间运行下的机械稳定性。
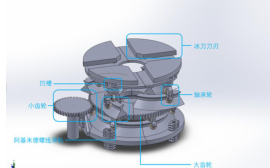
2.多向旋转主副冰刀结构
主除冰模块采用大齿轮带动阿基米德螺线滑道的方式推动刀组旋转。在大齿轮旋转过程中,安装于螺线轨道上的轴承轮驱动刀刃逐步向索缆中心靠拢,形成夹紧力。刀刃在凹槽结构的约束下同时产生径向切削动作与圆周旋转,实现索缆表面大冰层的均匀切割。该结构具备一定的自调节能力,适应不同厚度冰层分布。刀片采用高碳钢材料,并经热处理工艺完成淬火处理,提高刀刃硬度并延长使用寿命。副冰刀模块在主冰刀完成粗除冰作业后进行补充性精除冰操作。模块由四个旋转电机与小型冰刀组成,通过弹簧压紧方式稳定附着在缆体表面。冰刀结构设计由学生利用AutoCAD 完成二维草图绘制后导入SolidWorks 进行三维建模,最终使用PLA 材料 3D 打印成型。旋转电机控制由 Arduino 程序中设定的定时 PWM 输出模块管理,使副冰刀在特定时段启动并完成清扫作业。装置测试中表现出对0.5mm 以下薄冰具备良好去除能力,保证索缆表面处理的完整性。主副刀组之间设置机械缓冲机构,防止在冰层厚度突变时刀刃出现过载损伤。各刀组之间采用可调节连接结构,便于现场更换或维修。模块间通信通过主控制芯片设定的状态标志信号实现同步执行,提升系统整体运行的协同性。
3.智能控制与可视辅助模块集成逻辑
远程控制模块选用ESP8266 芯片作为无线通信核心,配合Arduino UNO 主控板及KY-019 继电器阵列实现对各电机的通断控制。整个通信逻辑由 C 语言构建,程序结构以命令识别、设备编号匹配、执行反馈三段式完成,实现精准的电机控制响应。ESP 模块通过WiFi 连接至操作者移动端平台,指令下发后经主控板转换为继电器开闭信号,进而控制运动模块、除冰模块按序工作。视频监控模块由微型高清摄像头、信号传输模块与前端显示终端组成。摄像头安装于装置顶部,通过铰接关节可手动调节拍摄角度,满足不同索缆直径与作业场景的取景需求。视频信号采用压缩后经图传模块回传至控制端界面,操作者可通过手机或电脑终端实时监控作业状态。图传模块由国内某高校机器人工作室团队提供原型技术,稳定性较高,适配多种远程网络协议。控制系统整体采用模块化开发方式,方便后续功能扩展与软件升级。通过设备参数实时回传,控制平台可记录每次作业过程的行走轨迹、刀组负载、电流波动等核心数据,为后续维护与优化提供决策依据。电源系统采用双路供电设计,一路为主控模块供电,另一路经降压模块直接为执行电机与继电器供电,保障系统在远距离作业时的稳定性。
三、控制系统与工程验证
1.控制系统架构设计与功能实
控制系统作为设备协调运行的中枢,整合了无线通信、信号处理、电机驱动与状态反馈等多个模块。核心控制单元采用Arduino UNO 开发板,搭配ESP8266 WiFi 模块作为远程通信接口,辅以 KY-019 继电器模块实现电机与灯控等执行指令的物理输出。控制板接线采用集中式排布,分设主控区、电源区、信号区,确保布线清晰、指令响应准确。由学生完成控制电路焊接与模块初步集成,验证了各部分的功能独立性与协同稳定性。程序设计基于C 语言完成,控制逻辑包括模块识别、命令解析、执行状态切换、异常处理等四部分。在逻辑结构中设置状态标志变量,用以识别每一电机的开启状态、夹紧反馈与除冰程序启动同步。程序调试借助ArduinoIDE 完成上传与串口反馈检查,验证指令输入、延时设置、电机响应时间等性能指标。控制界面开发利用基于HTML 和JavaScript 的网页平台搭建,用户可通过手机或电脑浏览器远程访问控制面板,实现设备启停、电机旋向调整、视频预览等操作。
2.通信机制与反馈系统构建
无线通信模块由ESP8266 芯片承担WiFi 连接任务。设备开机后自动连接指定局域网,控制端通过TCP/IP协议将控制命令发送至芯片端口。通信过程中,ESP 模块接收命令并通过串口发送至Arduino 主控板,再由主控程序识别指令类型后控制对应继电器动作。命令格式使用“模组编号+动作编号”二进制格式标准化,确保通信结构统一、响应效率高。学生利用串口模拟器与远程调试工具,对通信链路进行了多轮容错测试与指令纠错机制优化。状态反馈系统包含电机限位开关反馈、电流检测反馈与视频图像回传三部分。限位开关用于监测运动模块夹紧是否到位,在AB 板触碰到设定触点时产生脉冲信号,Arduino 读取后进入下一个动作指 ♠ 电流检测模块由ACS712 电流传感器组成,实时监测各电机工作状态,当出现堵转或过载信号时中断该电机控制指令,切断输出并发出报警。视频回传系统则通过高清微型摄像头捕捉除冰作业画面,经ESP 图传模块压缩后回传至前端界面,由用户实时掌握运行环境。
3.样机测试与性能验证过程
实物样机制作完成后,组织开展了多轮实验平台测试,搭建包括可调角度索缆模型、人工结冰模拟装置、电源供给系统与视频监控终端的综合试验平台。测试任务包括90 度垂直爬升运行、20mm 至 50mm 不同索缆直径适配性验证、多层冰层去除效率测试、远程操作响应时间测试、持续运行稳定性测试五大部分。垂直爬升实验中,装置通过控制运动模块八组电机协同输出,实现整机在模拟索缆上平稳升降,过程中夹紧稳定,轮组未出现滑脱与停滞。不同索缆直径适配实验表明,夹紧机构在弹簧与丝杠双重压控下可快速完成宽度调节,主刀组与副刀组在变径缆体间保持良好附着力与切削压力。人工结冰实验采用冰水喷雾冷冻法制造不同厚度冰层,主刀组可在单次运动中完成3mm 至10mm 冰层切割,副刀组在主刀后快速修整残冰,切削过程整齐无残留。远程响应测试在不同网络环境中进行,控制平台延迟平均维持在800ms 以内,数据反馈稳定,视频无明显卡顿与丢帧。整机运行测试在连续作业2 小时周期内无结构损伤、电机过热或电压波动现象,证明设备具备良好的稳定性与工程适应能力。
结论
便携式智能索缆安全保障装置结合现代智能控制技术与结构优化理念,解决了传统索缆除冰作业中存在的适应性差、安全风险高、操作效率低等技术难题。通过模块化设计实现运动、主副除冰、远程控制、视频反馈等多项功能的有机融合,提升了设备的系统集成度与运行可靠性。运动模块的自适应夹紧与垂直行走能力,使装置可应用于多种直径和角度的缆索环境;主副冰刀的协同除冰结构提升了除冰完整性;ESP8266 与Arduino构建的控制系统实现了远程精准控制与状态监测;视频回传与传感器反馈机制保障了操作的实时可视与运行安全。设备在实验平台中的工程验证表明,其在适应性、稳定性与实用性方面均达到工程应用标准。结构部分经受不同角度、不同冰层、不同索径的测试,控制部分经受长时间运行、通信中断、电机负载等多项极限工况考验,均未出现系统性故障,展现出良好的工程可行性。项目研发过程中融合了多个课程模块知识,体现出较强的综合设计能力与技术集成能力,具备进一步拓展功能、优化性能、产业化推广的基础条件。
参考文献
[1]周鑫. 高压输电线路智能除冰技术研究进展[J]. 电力系统自动化, 2023, 47(12): 115-121.
[2]胡建国. 基于 Arduino 的多电机远程控制系统设计与实现[J]. 电子技术应用研究, 2022, 50(3): 78-82.
[3]张倩. 复杂索缆系统的结构振动与力学特性分析[J]. 机械科学与技术, 2021, 40(7): 1034-1040.
[4]吴正强. 面向工程应用的模块化智能设备开发教学改革探究[J]. 实验技术与管理, 2024, 41(2): 90-94.基金项目:
1、2025 年大学生创新创业训练计划项目-便携式智能缆索安全保障装置(202511430036)2、辽宁省教育科学“十四五”规划2024 年度课题《地方应用型高校机械专业学生创新实践能力培养模式究》(JG24DB290)
3、2024 年本科教学改革研究项目-虚实结合的机电创新实践基础虚拟仿真课程建设的研究与实践
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)