.jpg)
柑橘采摘收集一体化装置设计

杨怡帆 刘江 唐俊杰 张语晴 杨舒童 晏余单
重庆三峡学院机械工程学院 重庆万州 404100
1 引言
三峡地区的柑橘产业因当地优越自然条件而果品优良、品牌众多,政府支持使其竞争力不断增强。但重庆柑橘采摘多依赖人工,效率低、成本高且面临用工难题[1-3]。因此,研发一款集多种功能于一体的便捷采摘装置,对提升产业效率、降低成本、推动三峡柑橘产业发展意义重大。
2 柑橘的生物特性
本文研究的装置主要针对古红橘,古红橘是特色柑橘之一,其形状是横径大于纵径呈扁球形状,查阅相关文献,得出一百个古红橘的相关参数[4],表1 所示。
表1 古红橘参数

由表可以得出古红橘的平均横径为 53mm ,平均纵径为 45mm ,平均质量为 88g ,果梗平均直径为 2.1mm ,本装置的设计将以此数据为基础。
3 行走机构的设计
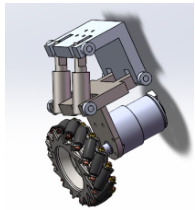
行走机构负责支撑装置个所有重量,包括采摘机构、分拣和收集机构、采摘的柑橘,除此之外,行走机构还需要提供足够的动力使整个装置在柑橘园中运动,这就需要行走机构有足够的刚度、稳定性和动力[5-6]。本设计采用的是麦克纳姆全向轮如图1 所示。
图1 行走机构三维模型
4 采摘机构的末端执行器的设计
图2 末端执行器三维建模
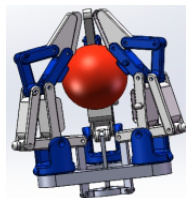
本文为柑橘采摘收集一体化装置设计了一种成本低、结构简单、具有一定柔性的末端执行器[7-8],该末端执行器为手指式,其有三根手指,由指尖、指中、之底、连杆组成,其通过电机带动连杆,再由连杆带动手指运动,实现手指的伸张和抓取动作,电机还能够驱使整个执行器进行旋转。通过 SolidWorks 三维建模,末端执行器三模型及末端执行机构抓取果实示意如图 2 所示。手指内部与柑橘果实所接触的面有软硅橡胶,以减小果实的机械损伤、增大手指与手指内表面的摩擦力。
通过表 1 中的实验数据可知,实验所测的 100 个古红橘横径最大值为65mm ,最小值为 46mm ,平均值为 53mm ,纵径最大值为 58mm ,最小值为 36mm ,平均值为 45mm 。由此确定采摘末端执行器的运动范围,使其能采摘柑橘的最佳范围为:最大横径 80mm ,最小横径 35mm ,最大纵径 70mm ,最小纵径 30mm 。
5 分拣收集装置
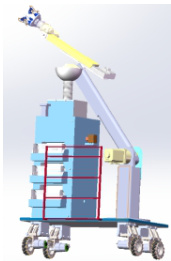
柑橘完成采摘流程后,还需进行收集和分拣,分拣时需要根据柑橘的大小进行分类,常规的分拣方式大多为人工分拣,而人工分拣存在分拣速度慢、增加了人力成本、人工易疲劳、出错等问题[9],所以,本设计也增加了分拣和收集装置,装置的功能更加完善,其 SolidWorks 三维建模如图3 所示。根据表1 中的实验数据,将三个等级的数值分别定为 40mm , 70mm ,90mm 。即从上到下,第一个分拣口允许通过的柑橘的横径和纵径的最大值为 40mm ,第二个分拣口允许通过的柑橘横的径和纵径的范围在 40-70mm ,第三个分拣口允许通过的柑橘的横径和纵径范围在 70-90mm 。
图3 分拣收集装置的三维模型

图4 柑橘采摘收集一体化装置三维模型
3 结论
本文所设计的柑橘采摘收集一体化装置,在人工确定柑橘采摘位置后,控制行走机构靠近柑橘树,由视觉识别系统识别到适合采摘的柑橘,确定柑橘位置坐标后,机械臂调整到最佳姿态,末端执行器找到最佳位置后采摘柑橘,采摘方式为通过拉扯旋转扯断果梗,完成采摘后,再调整机械臂和末端执行器,将柑橘送入碗状收集器中,柑橘经过传输管、缓冲板,进入分拣筒中,不同大小范围的柑橘进入不同的收集盒,至此柑橘采摘分拣收集工作完成。有助于减轻果农工作负担,提高生产效率。
参考文献:
[1]张益维,罗强,王海宝.重庆地区柑橘机械化采摘问题分析[J].广西农业机械化,2019,(6): 14
[2]Harrell R C, Slaughter D C, Adsit P D. A fruit-tracking system for robotic harvesting[J]. Machine Vision and Applications, 1989, 2: 69-80.
[3]近藤直.农业机器人[M].中国农业大学出版社,2009.
[4]秦雪静.柑橘无损采摘机构末端执行器设计[D].重庆三峡学院,2021
[5]蔡健荣.柑橘采摘机器人的柔性采摘装置和方法[P].中国专利:CN101273688,2008.10.01
[6]魏博,何金银,石阳.欠驱动式柑橘采摘末端执行器设计与试验[J].农业机械学报,2021,第 52 卷(10): 120-128
[7]郑涵.柑橘采摘机器人末端执行器设计与分析[D].重庆三峡学院,2022
[8]刘晓冉,杨茜,王若瑜.1980—2009 年三峡库区空中水资源变化特征[J].自然资源学报,2012,(9): 1550-1560
[9]邱冰.串并混联式柑橘采摘机构设计与研究[D].南昌大学,202通讯作者:刘江,副教授,农业机械研究。
基金项目:重庆市大学生创新创业训练计划项目(S202410643016)
.jpg)
.jpg)
.jpg)
.jpg)