.jpg)
基于相位辅助的时间同步算法研究

刘洪芳
贵州航天天马机电科技有限公司 贵州省遵义市 563099
1 引言
未来编队级协同对抗场景主要分布于陆海空天不同领域的各类编队设备节点协同执行侦察、非合作目标监视、射频类目标干扰和敏感区域封控等任务,在此类任务场景中,卫星信号随时可能被阻断、欺骗,导致导航与通信设备质量可靠性严重下降,这对于持续任务执行需求来说是不可调和的,虽光通信网络具备抗干扰能力[1],但在快速高机动任务执行实际应用中,光通信网络因缺乏无线组网能力,致使远距离多节点协同组网通信实用性降低。目前,各国军事领域和民用领域对卫星导航的依赖性较强,解决因卫星信号脆弱性而产生的导航失效及信息互联互通问题已迫在眉睫。然而,在拒止条件下,导航及通信设备首要解决的问题是通信节点的时间同步,以此保证设备与设备之间协同导航与通信能力的可靠性。
2 同步算法设计原理分析
传统时间戳算法采用帧起始检测器来精确估计帧到达时间(Time ofArrival) TOA [2]。采样量化判决误差小于一个采样周期,即小于一个时钟周期,属于相位误差。为了提高同步精度,一种方法是提高时钟频率减小时钟周期实现更高精度时间同步。时间粗同步将接收到的基带信号和本地同步头序列滑动相关,将超过门限值的采样点判决为同步位置,因此时间粗同步精度为 1 个符号。若将接收信号上变频 5 倍,并分成 5 路分别做整数倍延迟后再下采样。将这 5 路信号按粗同步滑动相关方法进行运算,得到的5 个同步相关峰中最大值对应的那路信号进行同步标志,从而实现时间精同步过程,将精度提升到 1/5 符号内。
虽然该方案实现原理简单,但需要的滤波器数量多且运算量较大,占用硬件资源,最关键受限于 FPGA 时钟速率,不能处理太高速率的数据流。因此本文设计了另一种相位辅助的分数倍时间同步精同步算法。核心原理是时域时延等效于频域相移。
令物理层帧同步后的时间粗同步输出数据为:

其中 A0 表示信号的主径幅度, τ 为信号存在的小数时延, τn 表示信道中的多径时延。
将接收信号和本地信号在频域共轭相乘,共轭乘运算结果经过 IFFT 处理后获取的时域信号 x(t) 可表示为:

为了减少噪声因子对结果影响准确度,进行信号累加处理再进行取相位操作。根据相位和时延的关系式:
φ(ω)=τ⋅ω
可知相位和信号频率是正比例函数关系,求出相位-频率比例常数即可得到接收信号和本地信号的分数时延差值 τ 。根据上述设计流程可得:
3 仿真链路结构
通过 Simulink 仿真测试时间精同步。发射端信源选择伯努利信源模块分别产生等概率随机序列作为业务数据和控制数据,然后经过比特级和符号级处理再组帧,最后通过数字中频和数模转换模块送入信道。接收端经过中频接收后,先进行时间粗同步,再进行时间精同步。随后进行与发射端对应的基带信号处理流程。
4 仿真结果与讨论
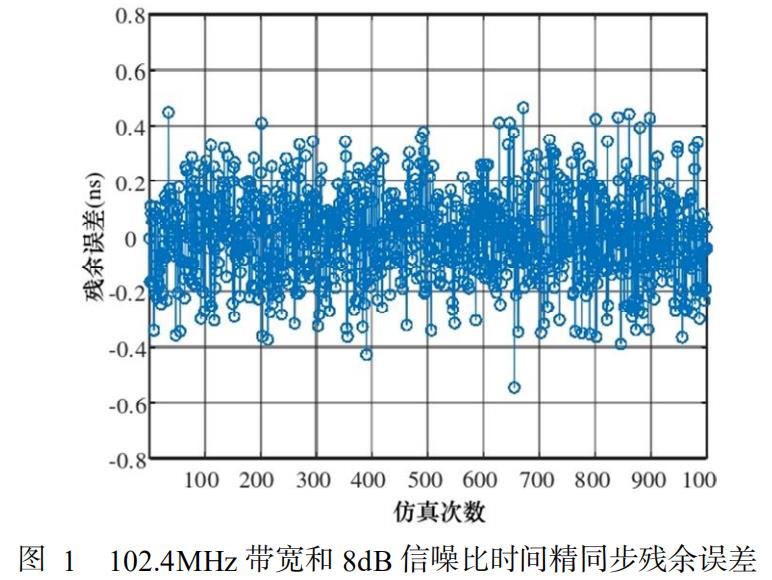
根据前述分析,基带信号带宽越大,往返时延整数倍时间粗同步误差越小,相位辅助的分数倍时间精同步越高。考虑到 FPGA 处理数据速率性能和硬件资源占用情况,本文最后采用 102.4MHz 信号带宽进行后续仿真和实现验证。在 102.4MHz 信号带宽,信噪比 8dB 情况下对单向时间同步链路进行仿真测试,捕获 1000 帧的精同步结果如图 1 所示,本文设计的相位辅助的分数倍时间精同步算法误差可以控制在 500ps 以内。
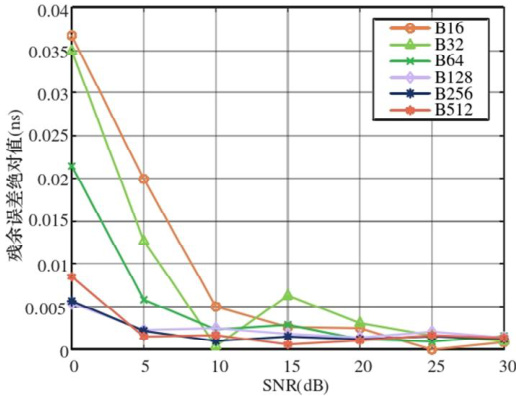
在 Simulink 链路中,设置缓存帧数 Buffer 值分别为 16 帧-512 帧进行仿真测试,结果如图 2 所示。可以看出平均帧数越多,精同步残余误差收敛越快,精度越高。
图 2 精同步结果算数平均处理对比图
5 结论
本文研究了相位辅助时间精同步算法,对算法设计、性能仿真及仿真测试,结果一致表明,本文设计相位辅助时间精同步算法解决了在未来编队级拒止条件下的同步授时问题,提升导航与通信设备在无法正常接收卫星导航授时信息拒止环境下实现时间精确同步,为高质量信息交互提供技术支撑。
参考文献
[1] Hongfang Liu,Yang Jiang,Chao Wei. All-optical microwave oscillator based on feedback modulation within distributed feedback laser diode [J].Optical Engineering,2021
[2] 杨琦,石江宏,陈辉煌.无线自组织网络分布式时隙同步算法[J].系统工程与电子技术,2011
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)