.jpg)
EP2002制动系统的应用及其内部气路浅析

张欣
兰州交通大学 机电工程学院 甘肃兰州 730070
引言
随着城市轨道交通网络化发展,列车运行密度、载客量及安全标准持续提升,传统气动制动因响应速度慢、控制精度低、维护复杂等问题,难以满足现代轨道交通需求。在此背景下,德国克诺尔(Knorr-Bremse)公司推出的EP2002 电空制动系统,通过“电子控制+气动执行”的深度融合,实现了制动指令的毫秒级响应、单轴防滑控制及故障自诊断,成为全球地铁与动车组的主流选择。某地铁运营车辆选用四动两拖六辆车编组的B 型车,制动系统采用德国克诺尔公司提供的EP2002 摩擦制动系统,控制理念为基于分布式的单个转向架微机控制,核心部件是EP2002 阀,若单阀故障时,制动力损失可由传统系统的100%降至 16.7%⨀ 。
1 EP2002 制动控制系统架构
1.1 EP2002 系统概述
EP2002 系统核心设计理念“集中管理、分散控制”,是将制动控制和制动管理电子设备以及常用制动(SB)气动阀、紧急(EB)制动阀和车轮防滑保护装置(WSP)气动阀等多个模块集成到一个阀体中,组成智能阀或网关阀,分别装在其所控制的转向架上,由六节车厢组成的列车被划分为两个牵引单元,任意单元内EP2002 智能阀与网关阀布置成三辆车CAN 总线结构可进行单元内通信,MVB 总线则实现单元内的牵引控制,制动通信,两个单元间的通信则由WTB 完成。
MVB-IO 接受通过 RS-485 传来得ATO 或主控制器的牵引制动指令,指令通过 MVB 网络传输给CCU 和 VCU。通常CCU 根据指令和列车状态形成指令,并发送指令给VVVF 和制动,在 CCU 故障时,相临VCU 像 CCU 那样,生成驱动和制动指令,并通过 TCN(MVB/WTB)网络发送这些命令给VVVF 和制动器。
1.2 EP2002 关键部件及其特点
按照功能差异EP2002 阀大致分为三类智能阀、网关阀、RIO 阀(远程输入/输出阀):
智能阀可认为是机电一体化集成阀,主要由气动阀单元(PVU)、供电单元(PSU)卡、本地制动管理(RBX)卡等部件组成,通过CAN 总线传输信号来控制其所在转向架上的制动器缸压力(BCP),同时对每根轴执行防滑保护。
网关阀除具备EP2002 智能阀的所有功能,结构上还增加了制动管理(BCU)卡、可选网络 COMMS卡等部件,可将常用制动压力要求分配至所有装在本地 CAN 网络中的 EP2002 阀门,网关阀还通过集成的MVB 网络接口卡为EP2002 控制系统和列车管理系统提供接口,可以向车上所有的空气制动装置发出制动指令。
RIO 阀(远程输入/输出阀)即为增强版智能阀,通过硬线与牵引控制单元通信,实现电制动与空气制动的动态协调
1.3 EP2002 制动系统控制方式
目前地铁行业内主要采用的制动系统控制方式有车控、架控两种。车控即车辆级控制,由列车管理系统通过MVB 总线向网关阀发送制动指令(如目标减速度、载荷等级),优点是维修价格低;架控即转向架级控制,网关阀接收指令后,通过CAN 总线(EP2002 专用)将制动需求分配至本转向架的智能阀或自身(若为网关阀),优点是控制更精准,舒适性更高;制动控制系统故障造成的影响更小;黏着系数下降,发生空转滑行,能够快速精准的触发防滑保护。
1.3.1 EP2002 制动类型及实现原理
EP2002 制动系统可为列车提供常用制动(含保持制动)、快速制动、紧急制动,并具有远程缓解及防滑保护功能。常用制动是以电动制动为主的电空复合制动,制动加速度为 1.0m/s2 ,随时都能缓解,制动力的大小和司控器的级位有关系。紧急制动则是属于纯空气制动,充气施加,排气缓解,需要停车后手动复位。根据紧急安全回路得失电的状态进行制动:紧急制动回路上的紧急电磁阀一般是常带电的,不会施加紧急制动;当列车的正常运行中遇到突发事件时,保险电路被切断,安全回路断开,则实施紧急制动。紧急制动一旦施加,不能马上缓解,只有等列车完全停止或者紧急回路重新建通电才能缓解紧急制动。快速制动主要由司机通过控制器发出指令,以实现列车的迅速停车。它与常规制动一样,都属于电空混合制动系统,且随时都能缓解。
2 EP2002 制动控制系统气路作用分析
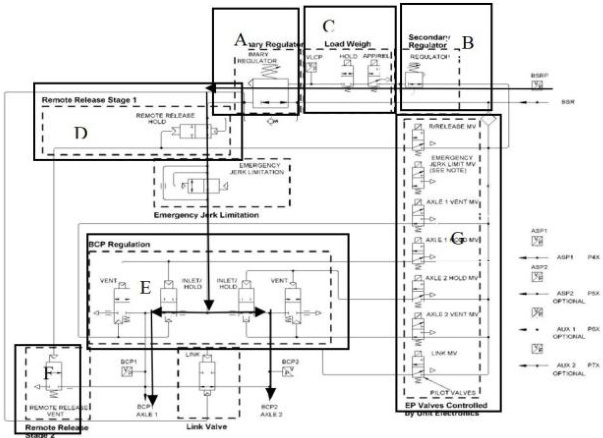
EP2002 系统以“气动阀单元(PVU)”为核心,其内部气路分为8 个功能区域,通过管路与电子控制模块协同工作,具体为:主调节器(A 区)输出载荷匹配压力(空载 3.0bar→满载3.8bar);副调节器(B 区)压力上限限制,硬线限制制动缸压力 ⩽3.8bar ;载荷称量(C 区)感知动态载荷,将空簧压力(1.5-4.2bar)转换为控制气压;压力调控(D 区)控制充/排/保压(响应频率 100Hz );连接阀(E区)WSP 时隔离双轴气路(切换时间 <0.1s );远程释放(F 区)是一个强迫缓解接口;电磁阀组(G区)EB 直通控制(断电触发);传感器组(H 区)实时监测BCP/BSP 等4 路关键压力。
制动风缸(BSR)的压缩空气通过主风管进入 EP2002 阀,经过副调节器(B 区),副调节器通过与空气簧系统连接,将输入压力限制在紧急制动的最大压力范围内(通常为满载工况下的压力值),防止制动缸压力过高,副调节器的输出压力进入主调节器时压力调节由 “载荷称量单元(C 区)” 控制,通过空气簧系统传来的压力信号,向主调节器提供控制压力,使主调节器输出与载荷匹配的紧急制动压力。主调节器的输出压力进入制动缸压力调整器(D 区),通过电磁阀(G 区)的电控信号进一步调节压力,形成符合常用制动要求的制动缸压力(BCP)。调整后的压力通过两条独立管路分别供给转向架的两根轴(轴 1 和轴 2)的制动缸,并通过“连接阀(E 区)”实现压力的联合或隔离,如图 2.1。
2.1 典型工况下气路原理与阀体动作
2.2.1 常用制动
常用制动是列车运行中最频繁的制动工况,目标是根据司控器指令(1\~7 级)输出线性变化的制动力 0.5-3.0bar⋅ )。
指令传递:TCMS 根据司控器手柄位置计算目标减速度(如 0.8m/s2 ),通过MVB 发送至网关阀,BCU 卡结合载荷数据(来自空簧传感器)计算各转向架目标制动力,再通过CAN 总线发送至对应智能阀;
气路具体动作以某地铁车辆施加5 级常用制动(目标BCP=1.8bar)为例:首先主调节器启动,空簧压力设定为5.0bar 输入主调节器,输出基准压力 BP=5.0×0.08=0.4bar (紧急制动基准压力为 5.0× 0.08×4.75=1.9bar ,对应AW3 工况);其次副调节器进行限压, BP=0.4bar< 副调节器设定值(3.8bar),副调节器全导通;再是进行D 区制动气缸压力调控。由于G 区R/缓解电磁阀失电→远程缓解阶段一关闭(停止向制动缸充气),排气/保持电磁阀失电→D 区进气阀导通、排气阀关闭,制动缸压力从 0逐渐上升,直至BCP 传感器反馈值=1.8bar,因未触发滑动保护,E 区连接阀导通,左右轴制动缸压力同步上升。最终,制动缸压力稳定在 1.8bar,车辆以目标减速度(约 0.8m/s2 )减速。
2.2.2 紧急制动
紧急制动是列车遇到危险时的最高优先级制动,要求0.5 秒内达到最大制动力(3.8bar),且不可人为缓解(需停车后旋转蘑菇头复位),其气路动作以“快速建压、可靠停车”为目标。
触发条件:司机按压司机室蘑菇头按钮,使EB 环路断开。
指令传递:紧急制动环路断开信号通过硬线传输至网关阀,同时TCMS 发送紧急制动指令
气路具体动作:当EB 环路断开时,G 区紧急制动脉冲电磁阀得电,其对应气动阀关闭,切断主调节器与 D 区的节流通路;主调节器绕过副调节器(B 区),直接将空簧压力(5.0bar)通过机械备份通道输出至 D 区;D 区由于排气/保持电磁阀得电使进气阀全开、排气阀关闭,处于全导通充气状态,直到制动缸压力在0.5 秒内从0 升至3.8bar(最大紧急制动压力)。
2.2.3 车轮滑动保护控制
当检测到车轮滑行(如轴速差超限或减速度过大),EP2002 阀通过 CAN 总线接收信号,控制“连接阀(E 区)”切断轴间压力连通,使两根轴的制动缸压力独立调节。同时,D 区通过电磁阀快速排气或保压,纠正滑行。
3 结论与展望
EP2002 制动系统通过分布式控制、模块化集成与智能化诊断,彻底改变了传统制动系统的设计逻辑,在地铁线路中展现出卓越的可靠性与经济性。但在维修方面,因其阀体高度集成导致现场维修困难,且无直观故障代码依赖专用软件,需返厂维修,维修周期长。未来,随着轨道交通向智能化、绿色化发展,EP2002 系统可在无线通信升级方面进一步优化,即采用5G 或Wi-Fi 6 替代CAN 总线,实现阀间通信延迟 <10ms⋅ 。
参考文献:
[1]Knorr-Bremse. EP2002 Brake System Technical Manual [Z]. 2020.
[2]深圳地铁集团有限公司. 深圳地铁三号线车辆制动系统检修规程[S]. 202
[3]王开云, 等. 基于 EP2002 的地铁车辆防滑控制策略研究[J]. 铁道车辆, 2019, 57(6): 12-1
[4]张卫华, 等. 分布式制动控制在轨道交通中的应用与发展[J]. 中国铁道科学, 2020, 41(3):
[5]王建军. EP2002 阀体气路仿真与故障诊断研究[D]. 西南交通大学, 2021.
作者简介:张欣 1992 年08 月出生,女,汉族,甘肃庆阳人,非全日制研究生,工程师,研究方向,车辆工程。
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)