.jpg)
智能厨房废物处理器设计与控制系统优化研究

李普
杭州科丽迅机电有限公司 浙江省杭州市 310000
1.引言
随着智能家居与垃圾分类政策的广泛推广,厨房废物处理器正从传统机械控制逐步向智能化控制系统演化。在实际应用中,厨房废弃物种类复杂、物理特性差异大,使得固定控制逻辑难以满足动态运行环境的需求。此外,能耗高、噪声大及响应滞后等问题进一步限制了传统处理器的使用体验与推广效益。已有研究主要围绕机械结构优化、电机性能改进与滤波降噪技术展开,然而对嵌入式智能控制机制的系统性设计仍显薄弱,特别是在负载感知、能效调度及人机交互方面缺乏有效集成。
本文以 STM32 嵌入式平台为核心,构建一套具有状态感知、自适应调节与智能交互功能的厨房废物处理系统。通过引入多类型传感器与控制算法融合机制,实现对处理全过程的动态建模与精细控制,从而提升系统的稳定性、智能性与节能性。
2 系统架构与功能设计
系统整体结构采用“感知—决策—执行—交互”四层架构,各子模块通过串行通信实现数据协同与指令响应。
2.1 感知模块
为实现对垃圾类型与运行状态的精准判断,系统部署红外、电流、电压、振动与温湿度传感器,分别用于检测投放行为、运行负载、电机状态与环境条件。多源数据经时间同步、归一化与滑动滤波处理后,形成状态向量  ,用于后续控制逻辑输入。
,用于后续控制逻辑输入。
2.2 控制模块
控制系统以STM32F407 微控制器为核心,具备多通道 ADC、PWM 控制与中断响应能力。控制策略由两部分组成:
模糊控制器:基于“当前负载—转速—运行时长”三维输入,输出最优 PWM 占空比与水阀开度,规则库基于 16 组运行工况构建,采用 Mamdani 推理与重心法解模糊。
功率反馈调速机制:监测单位时间功率变化率与振动幅值变化量,构建调速因子Θ=f(ΔP,ΔA) ,实现动态运行阶段的能效优化调节。
控制系统运行于 FreeRTOS 调度环境,各任务响应周期控制在 50ms 以内,确保高实时性与稳定性。
2.3 执行与交互模块
执行单元采用 PWM 控制无刷直流电机驱动多层刀头,结合霍尔测速反馈实现闭环调速;水流由电磁阀与流量计控制,实现动态调节与节水优化。交互模块支持OLED显示、本地按键、蓝牙 BLE 与 LD3320 语音识别,构建远程控制与语音交互一体化的人机界面。
3 控制策略优化方法
3.1 多源状态建模与融合
考虑厨余垃圾物理特性多样性,系统采用多源感知融合方法构建状态特征向量X=[It,Vt,At,Tt] ,其中I 为当前电流,V 为电压,A 为振动幅度,T 为处理时长。通过滑动窗口滤波与同步机制消除数据抖动与延迟,提升状态感知的鲁棒性。
3.2 模糊推理调节机制
糊控制器设计采用三输入两输出结构,输入为负载强度、电机转速与处理时长,输出为 PWM 占空比与水阀开度。隶属函数采用三角形与梯形组合形式,规则库共设定16 条基于经验规则,采用 Mamdani 推理机制与重心法解模糊。在 STM32 平台中通过查表方式实现模糊规则快速匹配,提升控制计算效率。
3.3 基于功率反馈的动态调速算法
该算法依据功率变化趋势与振动响应判断当前处理阶段与物理特性,实现动态调节策略。控制逻辑分为三种工况:(1)功率持续上升 $$ 提高转速;(2)功率下降 →降速节能;(3)功率波动剧烈伴随高频振动 $$ 启动保护停机与告警。该机制有效提升系统对硬质垃圾的适应性与整体能耗表现。
4 实验验证与性能评估
为验证所提出系统的可行性与性能,构建基于 STM32F407 嵌入式主控的实物原型平台。系统集成无刷直流电机、多类传感器组件、PWM 控制模块、电磁阀水流控制机构以及 OLED 本地显示与蓝牙交互接口,满足实验室环境下的处理任务模拟与多维数据采集。
4.1 实验任务与场景设置
设计三类代表性处理场景,分别为湿软类垃圾(如菜叶、果皮)、中硬类垃圾(如鸡骨、鱼刺)与高硬质垃圾(如果核、玉米芯),分别代表低、中、高负载状态。每类场景均设置 3 组等量处理任务,分别使用本文系统与市售传统处理器进行对比实验,记录运行过程中的关键性能指标。
4.2 评估指标体系与测量方法
实验评估从运行效率、能耗水平、运行稳定性与智能响应能力四个维度展开,核心指标包括:(1)平均处理时间:任务完成所需总时长;(2)平均功率:任务过程单位时间功耗;(3)峰值功率:负载高峰瞬时功耗;(4)噪声强度: 1m 范围内声压水平;(5)故障响应率:堵转等异常事件响应成功率。
4.3 性能评估与结果分析
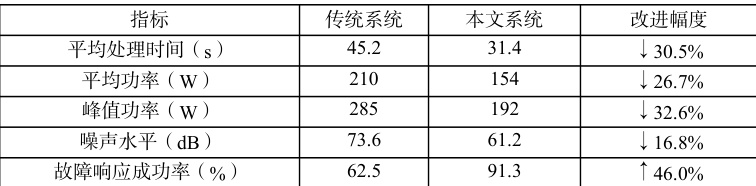
实验数据显示,本文系统在所有任务场景下均优于传统系统,具体表现为:处理时长减少 30% 以上,平均功率降低 26.7% ,峰值功率下降 32.6% ,噪声降低约 17% ,故障响应能力提升近 50% 。尤其在高硬负载处理任务中,模糊控制与功率反馈机制能有效调节运行参数,避免堵塞与系统异常停机,保障系统稳定性与安全性。
5 结论与展望
本文针对传统厨房废物处理器在感知能力不足、控制策略刚性、能耗较高等方面的关键问题,设计并实现了一种融合多源感知、模糊控制与功率反馈调速机制的智能控制系统。系统基于 STM32 嵌入式平台,集成多类传感器构建运行状态向量,通过模糊推理与动态功率调节协同控制电机转速与水流节奏,实现对处理过程的动态适应与精细调节。实验验证结果表明,所提系统在平均处理时间、功耗水平、噪音控制与异常响应能力等方面均优于传统固定速系统。其中处理时间减少约 30% ,平均功率降低26.7% ,噪声水平下降 16.8% ,异常响应成功率提升至 91.3% ,体现出较高的能效性能与系统稳定性。
本文的主要贡献在于:(1)构建基于多传感信息融合的运行状态建模方法;(2)设计结合模糊控制与功率反馈的自适应调速策略;(3)实现了系统在典型厨房负载场景下的可行性验证与工程应用分析。后续研究可从以下方向展开:(1)进一步引入轻量化机器学习模型,实现对垃圾类型与处理策略的智能匹配;(2)探索基于模型预测控制(MPC)或强化学习的控制策略优化路径,提升系统对复杂动态环境的调度智能;(3)从结构设计与电路集成角度优化整机布局与模块紧凑性,推动设备向小型化、低功耗、高集成方向发展,增强其在家庭场景中的部署适应性与产品化潜力。
参考文献
[1]Singh, P., Kumar, A., & Yadav, V.Energy-Efficient Fuzzy-Based Motor Control for Smart Waste Processing Units in IoT-Enabled Homes.Journal of Intelligent & Fuzzy Systems, 45(3), 2675–2686,2023.
作者简介:李普(1983.10.22-),男,汉族,河南原阳,技术部总工程师,本科,主要从事食物垃圾处理器的研究与开发。
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)