.jpg)
数字轨道胶轮新能源车辆牵引系统简介

耿华春
南京华士电子科技有限公司 210000
1. 前言
随着城市轨道交通行业的飞速发展,轨道交通现在在生活中已随处可见,地铁、轻轨作为主流的轨道交通模式已融入大家的生活之中,但是部分城市郊区内勤交通地铁、轻轨成本较高性价比较低,近些年来一种新型的数字轨道胶轮新能源车辆进入大家的生活,车辆外形美观,不占用独立路权,上海临港已有多条线路投入使用。牵引系统作为数字轨道胶轮新能源车辆的动力系统,属于整车的关键系统,本文结合上海临港车辆的成熟应用案列,对牵引系统进行介绍。
2. 车辆信息
2.1 车辆配置
车辆为3 辆编组形式,两头为带司机室的动车,中间为拖车,每两节车之间采用铰接装置相连,整列车共设置2 个双轴带动力转向架,2 个铰接拖车转向架,列车两头设有救援用车钩[1]。
列车编组形式
·采用2 动1 拖编组 +Mc1–T–Mc2+ ·Mc 车: 有司机室的动车 ·T 车: 无司机室的拖车
2.2 车辆重量
AW0(空车)42.543t,AW2(额定载荷)56.965t,AW3(超载)60.652t。
2.3 车辆轮径值
新轮:954mm、半磨耗:939mm、全磨耗:924m。
2.4 车辆其他数据
齿轮传动比6.734、最大运行坡道 100% 。
2.5 车辆供电方式
车辆采用无接触网的供电方式时,列车整个运行过程的能量均来源于车载储能设备超级电容,仅在线路终点站设置接触网,车辆在终点站停至指定区域后,手动控制受电弓的升降,给车载储能设备补充能量。
输入电压范围: DC477V~DC720V
额定电压:
制动电压达到DC730V 时切除电制动。
牵引 DC600V 制动 DC660V
2.6 车辆动力性能要求
2.6.1 牵引性能要求
在AW2 载荷工况,车轮处于半磨耗状态下,在干燥、清洁的平直轨道和额定电压下的牵引特性如下:
最高持续运行速度 70 km/h 结构设计速度 ≥80 km/h 启动加速度(0~40 km/h) ≥1.0 m/s2 平均加速度(0~70 km/h) ≥0.7 m/s2
2.6.2 制动性能要求
在AW3 载荷工况,车轮处于半磨耗状态下,在干燥、清洁的平直轨道和额定电压下的制动特性如下: AW3 平均常用制动减速度 Γ(70km/h~0 包括响应时间) ≥1.1m/s2
2.7 车辆故障救援性能要求
2.7.1 故障运行能力
在损失1/4 动力的情况下,车辆可维持当天正常运行。
在损失1/2 动力的情况下,车辆在空车情况下,能在 100‰坡道上启动,能维持运行至车辆段。
车辆牵引系统故障时不会引起其它车辆部件及设备的故障和损坏。
2.7.2 救援能力
一列空车能将另一列停在 100‰ 坡道上故障空车牵引到车辆基地。
3. 牵引制动特性计算
根据第2 章节车辆信息以及动力性能、故障救援性能的要求,进行对应的牵引制动特性计算,具体过程如下:3.1 牵引制动包络特性曲线
结合2.6 章节动力性能及 2.7 章节车辆故障救援性能要求,拟定牵引系统的牵引制动包络特性曲线启动牵引力100kN,21km/h 前工作在恒转矩模式,21km/h 之后工作在恒功率模式,牵引电机的启动转矩1885Nm。
车辆根据不同载荷工况进行对应的载荷补偿,不同载荷工况下的平均加减速度如下:

3.3 轮周功率曲线
AW3 工况不同供电电压下车辆轮周功率如下图所示,牵引模式下,600VDC-720VDC 供电范围内牵引功率可达到583kW。制动模式下,620VDC-720VDC 供电范围内制动功率可达到 777.5kW。根据蓄电池的工作特性,DC730V 时切除电制动。
3.4 故障模式分析
3.4.1 损失四分之一动力工况运行能力分析
故障运行要求在AW3 工况下当损失1/4 动力时,车辆仍然可以在100‰的坡道上起动,并能以正常运行方式完成运行。列车启动摩擦阻力基于以下公式进行计算:
运行阻力:Fr=137.66+76.75*M+24.39*V+0.0075*V*V
参数:
Fr= 阻力[kN]
M= 列车重量[t]
计算分析:列车启动阻力与坡道阻力之和64.28kN,额定工况可实现的总牵引力 75kN,可实现的启动加速度0.16m/s2,启动加速度 >0.lm/s2 且核实牵引系统热容量满足需求,满足损失四分之一动力故障运行要求。
3.4.2AW0 损失二分之一动力工况运行能力分析
车辆在AW0 载荷工况下损失1/2 动力时,能在100‰坡道上启动,能维持运行至车辆段。计算分析:列车启动阻力与坡道阻力之和45.09kN,额定工况可实现的总牵引力50kN,可实现的启动加速度 0.12m/s2 ,启动加速度>0.1m/s2 ,牵引需使用 AW3 载荷能力方可满足损失二分之一动力故障运行能力要求[2]。
损失二分之一动力后该车即将退出运行,建议此时TCMS 接收到一半牵引单元故障后,每个牵引单元输出的力矩指令固定在AW3 载荷,此时方可满足损失二分之一动力故障运行能力要求。
3.4.3 列车救援运行能力分析
列车救援运行的要求是在一列空车能将另一列停在100‰坡道上故障空车牵引到车辆基地。计算分析:列车启动阻力与坡道阻力之和90.16kN,额定工况可实现的总牵引力100kN,可实现的启动加速度 0.11m/s2 ,启动加速 ,牵引需使用AW3 载荷能力方可满足救援运行能力要求。
,牵引需使用AW3 载荷能力方可满足救援运行能力要求。
建议TCMS 接收到救援指令后,每个牵引单元输出的力矩指令固定在AW3 载荷,此时方可满足救援运行要求[3]。
4. 牵引系统主配置
4.1 主回路拓扑
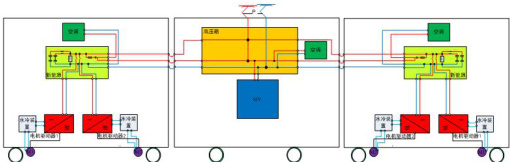
牵引系统主回路拓扑结构如图 4-1 所示:
图4-1 牵引系统主回路拓扑
牵引系统配置如下表所示:

5. 牵引系统主要设备参数
5.1 电机控制器
5.1.1 电机控制器原理
电机控制器的主要目的是将从储能设备获得的直流电压转换成变频变压的三相电压,用于控制牵引电机驱动车辆运行于牵引、惰行和制动工况。
电机控制器集成了预充电单元,可实现给驱动器中的支撑电容限流充电,防止大电流冲击而影响电容的寿命。电机控制器产生一个变频变压的三相电压以驱动牵引电机。当切换到制动模式时电能方向反转此时牵引电机工作在发电状态。此时机械能转换成电能,并通过电机控制器反馈回直流侧用于给储能设备充电。
4.3 牵引系统配置
电机控制器IGBT 半导体器件采用循环水冷进行有效冷却,逆变器的结构非常紧凑,通过内外冷却循环,使逆变器的发热有效的被传递出去而防止出现过热。冷却装置为单独的装置,安装在车辆底部[4]。
电机控制器的负载为永磁同步电机,电机内部集成高精度的旋转变压器,进行角度和角位置检测,电机控制器通过旋变检测出的转轴角位移和角度计算出电机实时的转速进行闭环控制。本项目使用的旋变为正-余弦旋转变压器。
电机控制器的峰值容量 350kVA,额定容量 160kVA,重量≤25kg,体积 502mm×402mm×138mm ,结构简单易于安装。
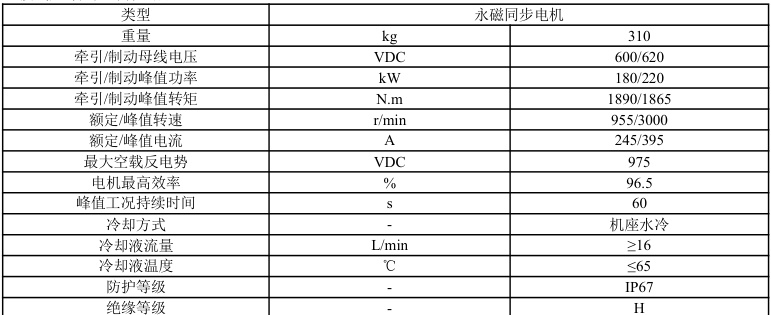
5.2 牵引电机
5.2.1 概述
牵引电机由定子、转子、机壳、传动端端盖、非传动端端盖、左右悬置支架、轴承、总装零件、温度传感器、接线盒等几大部件组成。
6. 结语
目前该套应用于数字轨道胶轮新能源车辆的牵引系统在实际运用过程中运用情况良好,且因其体积较小安装方便可灵活运用于各种平台车型。技术人员也需根据当前运用情况的反馈优化技术方案、控制方案,在确保性能的前提下不断提高系统的可靠性以及车辆的舒适性。
参考文献
[1]吴宗霖,邓江明,李旺,等. 轨道交通车辆永磁直驱牵引系统虚拟验证技术研究 [J]. 电力机车与城轨车辆,2025, 48 (03): 14-21.
[2]魏刚. 地铁车辆电气牵引控制系统研究 [J]. 现代工程科技, 2024, 3 (21): 113-116.
[3]王一丁. 城轨车辆永磁牵引系统分析与研究[D]. 北京交通大学, 2024.
[4]陈敏,竭宝. 轨道交通车辆电力牵引传动系统设计 [J]. 现代工业经济和信息化, 2022, 12 (05): 26-27.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)